 采用CC1101微功耗無線收發模塊,在通信過程中直接讀取RSSI值
采用CC1101微功耗無線收發模塊,在通信過程中直接讀取RSSI值
摘要:
傳統糧庫糧食溫度測量中,測溫節點的室內定位精度依賴大量信標節點,給實際的工程應用帶來了極大不便。為簡化應用模型,根據無線電波的距離衰減曲線特性建立差分定位模型,提出了基于接收信號強度指示(Received Signal Strength Indication,RSSI)差分定位模型的糧庫測溫節點定位方法。模型采用動態信標節點,根據RSSI值依次確定距離信標節點最近的未知節點,最終實現全部節點的定位。實驗表明,基于RSSI差分定位模型的糧庫測溫節點不需要額外布置信標節點,可以降低環境隨機誤差,而且定位精度高于傳統測距定位模型。
0引言
糧食安全問題是國家長遠發展戰略,而糧食儲存是糧食安全的關鍵因素之一。安全儲糧主要通過監測糧庫內部糧堆的溫度和濕度,當監測到某區域溫度升高時采取相應降低措施[1-2]。目前糧庫測溫設備在每次糧食入庫后人工手動編號來識別位置,需要大量人力、物力,且可靠性較低。
近些年隨著無線傳感器網絡技術的快速發展,越來越多的研究者開始關注室內定位的研究。室內定位主要分為兩類,一類為基于測距的定位模型:例如到達時間,到達時間差,到達角度,RSSI等;另一類為非測距定位模型,例如DV-Hop,質心算法等模型[3-6]。其中測距定位模型的定位精度要高于非測距定位模型,在測距定位模型中除RSSI外大多數測距定位模型都需要額外的硬件。
根據糧庫測溫節點的低功耗、低成本和高定位精度的要求,本文采用RSSI的定位模型。在無線傳感網絡硬件基礎上,對RSSI的距離衰減曲線分析,通過動態信標節點來提高測距模型的精度,采用差分定位模型降低環境誤差。通過對比實驗驗證了在實驗環境下差分定位算法僅需一個輔助信標節點就可以達到傳統測距定位模型在13個信標節點時的精度[7]。
1糧庫無線測溫節點設計
糧庫滿倉時糧食的厚度為5~7 m,在糧食上平面每隔4~5 m等間距放置節點,每個節點采集上下4個位置的溫度。本文采用CC1101微功耗無線收發模塊,在通信過程中直接讀取RSSI值。測溫采用DS18b20單總線數字溫度傳感器,每個節點配置4個DS18b20,上下等間距分布。所有測溫節點采用鋰電池供電,可獨立移動,相互替換。
2算法模型
2.1 無線電傳播路徑損耗模型
基于RSSI測距的模型主要通過發射和接收信號強度來計算信號傳播損耗而定位,信號傳波損耗值在相同傳播環境下隨傳播距離增大而增大,通過信號傳播路徑損耗模型可以將信號傳播損耗值轉換成距離值。RSSI衰減模型通常采用的常態分布模型:
從式(5)可知,RSSI值與A、n、d和Xδ有關,其中A和n受環境因素影響較大,傳統方法采用固定A和n來建立求距離d的模型的方式與實際環境不符合,因此造成的距離模型誤差較大,同時受高斯隨機誤差Xδ的干擾。為了減少以上因素帶來的誤差,對得到的RSSI值進行卡爾曼濾波,然后采用差分定位的方式減少環境因素的干擾,得到目標節點的精確位置。
2.2 RSSI的處理
RSSI是接收信號強度指示根據無線電在自由空間中傳播的路徑損耗而建立的模型,其值大小與電波傳播距離成反比。本文實驗節點采用TI公司的CC1101微功耗模塊搭建,從模塊內部寄存器可直接讀取通信過程中的rssidev值,其取值范圍是0-255,從參考文獻[8]可知rssidbm與rssidev有如下關系:
其中rssidev為CC1101內部寄存器讀取的16進制數,rssidbm為轉換后的十進制信號接收強度值,rssioff取值為74。為了方便模型的建立及求解,將rssidbm做以下處理:
通過以上處理得到RSSI值,其取值范圍是0-255具有比RSSI更高的分辨率。
2.3 差分定位模型
由于RSSI值受到環境的溫度、濕度、多徑效應等因素影響,因此即很難建立一個適用于所有情況下的基于RSSI測距定位模型。根據糧庫測溫節點布置的情況,本文在傳統測距定位模型的基礎上,提出一種基于RSSI的差分定位模型。
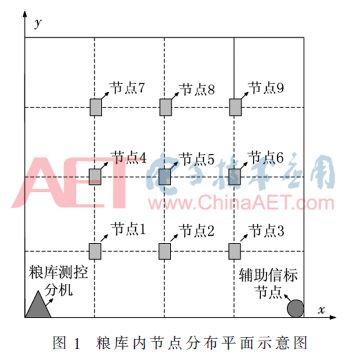
如圖1所示,糧庫內測溫節點按照等間距排列,且糧庫測控分機和輔助信標節點的位置已知,分別作為信標節點S1和S2,只需要依次確定出距離信標節點最近的位置節點,令其作為新的信標節點,依次循環下去即可確定出糧庫內所有測溫節點的位置坐標。
假設節點2和節點4距信標節點S1的距離分別為d1和d2,根據式(1)可得:
對比式(5)和式(10)可知節點2和節點4與信標節點S1間RSSI值之差僅與它們的距離d1、d2和n有關,而處于同一時刻環境下的n可認為某一定值,因此采用RSSI差分定位算法可以有效抑制式(5)中Xδ的干擾。
由式(10),根據?駐RSSI的大小可以得知d1和d2的相對大小。同理信標節點可以通過與所有未知節點間的RSSI值的比較,搜索到距離自己最近的未知節點。它們不依賴于傳統的測距方法,同時能夠適應各種變化的定位環境。
如圖1所示節點1~節點9被等間距布置在糧庫中,糧庫測控分機和輔助信標節點被布置在已知的位置,本文提出的差分定位模型及動態信標節點選取方案如下:
(1)選取已知位置的糧庫測控分機和輔助信標節點作為動態信標節點S1和S2。通過式(10)分別搜索與S1,S2距離最近的未知節點,即RSSI值最大的節點。因為節點1與S1通信時RSSI值最大,節點3與S2通信時RSSI值最大,因此節點1和節點3的位置可以被確定。
(2)令節點1和節點3分別作為信標節點S1和S2,在未知節點中分別搜索距離它們最近的節點。
(3)搜索結果中距離S1最近的節點有節點2和節點4,距離S2最近的節點有節點2和節點3。比較后發現節點2距離S1和S2距離相等,可以確定出節點2在S1和S2的中點,進而確定x軸方向排列有3個測溫節點,則節點2的位置可以確定。進而節點4和節點6的位置也被確定,并將它們確定為新的信標節點S1和S2。
(4)循環以上步驟2和3的直至所有節點定位完成。
3實驗驗證與分析
實驗采用TI公司的CC1101芯片在433 MHz開放頻段測試,通過該芯片內部自帶8位的RSSI寄存器獲取RSSI值。為了降低通信信道受空間電波干擾而影響測試數據,通過凈信道評估機制,確保每次測試前信道處于空閑狀態。
如圖2為本實驗用的測溫節點,硬件采用CC1101通信模塊和STM8L101單片機及18650鋰電池供電。
3.1 數據處理
實驗選擇每隔0.5 m測一組RSSI數據,其中每組測100次數值,對每組采集到的數據進行處理,通常處理的方法有均值法和次大值法。
為了選擇更加適合RSSI值處理方法,分別采用均值法、次大值法和最小二乘法3次擬合值得到圖3曲線。
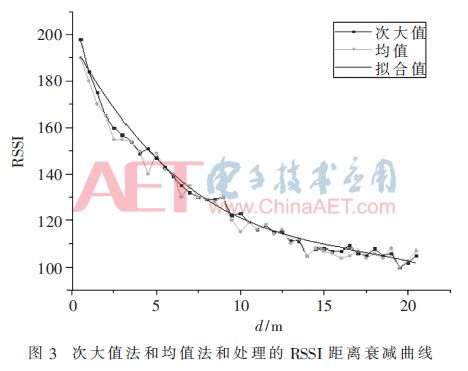
由圖3明顯可知次大值法比均值法的衰減曲線波動更小,而且和最小二乘法擬合得到曲線更加吻合。因此本文采用次大值法,對每組100個數據進行排序取次大值作為該組測試結果。
為進一步降低隨機誤差,對次大值法得到的結果進行卡爾曼濾波,實驗結果如圖4所示。通過圖4可知經過卡爾曼濾波后的衰減曲線更加平滑,更趨近于擬合值。為了衡量卡爾曼濾波效果,通常采用均方誤差(Mean-Square Error,MSE)來衡量。
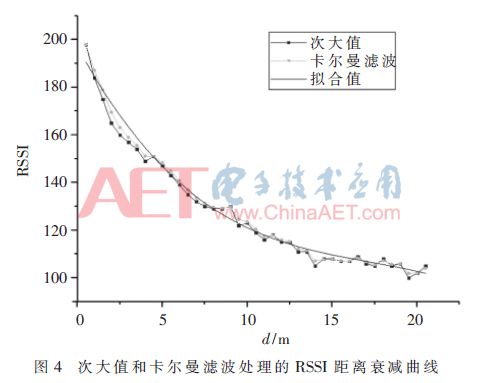
卡爾曼濾波前:MSE=9.7109
卡爾曼濾波后:MSE=3.6797
通過MSE計算結果可知,卡爾曼濾波前的MSE值大于卡爾曼濾波后的值,因此可以證明卡爾曼濾波明顯提高了RSSI值的可信度。
通過觀察圖4的RSSI距離衰減曲線可知,通信距離越近信號衰減越大,其中在0~10 m的范圍內通信距離占總測試距離的50%,但是信號衰減值占總測試衰減值的80%,由此可得出結論,信標節點距離被定位節點越近其定位精度越高。為提高定位精度采用動態信標節點,盡量選取距離被定位節點最近的節點作為信標節點,本文差分定位的模型中采用動態信標節點方案即選取距離待定位節點最近的已知節點作為信標節點提高定位精度。
3.2 差分定位實驗
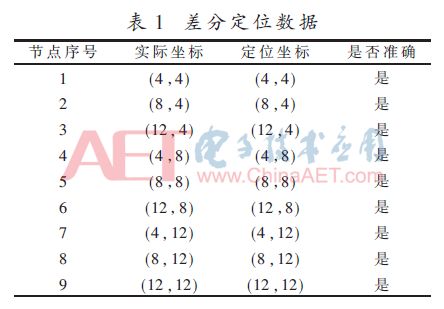
如圖1在一個16 m×16 m的糧庫內布置9個測溫節點,糧庫測控分機和輔助信標節點,將糧庫測控分機所在位置定義為坐標原點,通過2.3節提出的差分定位模型進行定位。
差分定位模型通過比較不同未知節點與信標節點間通信時RSSI值的相對大小計算它們與信標節點間的相對距離大小,從而避免了將RSSI值轉換為距離時帶來的較大誤差。由表1差分定位模型測試結果可以得出結論:(1)差分定位方案采用已知位置的節點輪流作為信標節點,保證在10 m內的通信距離,為定位精度提升提供了保障;(2)差分定位模型在定位過程中不需要人工干預,且精度不依賴于布置的信標節。
3.3 差分定位與傳統測距定位結果對比
在3.2節的實驗環境下采用傳統測距定位方式,研究所布置信標節點個數對定位精度的影響。糧庫測溫節點是等間距分布,因此傳統測距定位模型的定位結果只要落在以被測節點實際坐標為中心半徑為1 m的范圍內即認為定位準確。表2為布置信標節點個數與節點定位結果錯誤個數的統計情況。
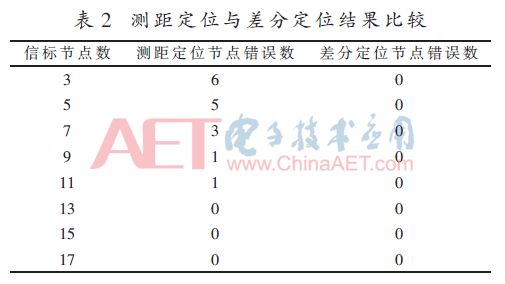
由表2數據對比可知,在相同環境下,傳統測距定位模型精度隨著信標節點個數增加而提高,當信標節點個數大于13個之后節點定位錯誤率降低為0。差分定位模型僅需要一個輔助定位節點和糧庫測控分機,在定位的過程中自動采用距離被定位節點最近的已知位置的節點作為信標節點,最終節點定位錯誤率為0。
4結論
為解決糧庫測溫節點定位問題,提出了基于RSSI的糧庫測溫節點差分定位算法,通過對比選取對數據處理的效果更好次大值法,為降低高斯誤差的干擾采用卡爾曼濾波對數據進行處理,最后采用RSSI差分的方法降低環境的干擾,通過實驗證明差分定位算法的有效性,在不增加大量信標節點的前提下采用動態信標節點的方案解決了糧庫測溫等各種等間距分布的無線節點的定位問題。
-
鋰電池
+關注
關注
260文章
8180瀏覽量
171609 -
微功耗
+關注
關注
0文章
41瀏覽量
11980 -
RSSI
+關注
關注
2文章
95瀏覽量
27829
原文標題:【學術論文】基于RSSI的差分定位模型在糧庫測溫中的應用
文章出處:【微信號:ChinaAET,微信公眾號:電子技術應用ChinaAET】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
VT-CC1101-433M 無線模塊 無線通訊模塊 通信模塊概述
TI CC1101學習筆記:工作原理簡單入門
TI CC1101學習筆記:工作原理簡單入門
CC1101極低功耗RF無線射頻芯片
高性能射頻收發器cc1101
無線芯片CC1100和CC1101的區別 淺談CC1101芯片的特點
cc1101低功耗設計方案 CC1101收發驅動程序
無線射頻芯片CC1101的特點和區別
無線射頻芯片CC1101的特點和區別
【芯選擇】CC1101芯片的模塊實例






 工商網監
工商網監
評論