 基于PIC單片機的仿生機器魚的舵機控制
基于PIC單片機的仿生機器魚的舵機控制
仿生機器魚實驗平臺屬于教育部和北京郵電大學共同出資支持的一項“國家級大學生創新性實驗計劃”項目,是一個集光、機、電、流體、智能于一體的實驗平臺,研究內容包括:仿生機器魚機械結構的研究,推薦效率的研究以及控制性能的研究。
1. 仿生機器魚平臺簡介:
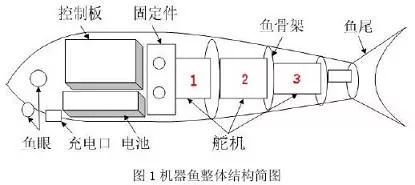
設計制作的機器魚模仿鲹科魚類的外形,頭部采用剛性結構的塑料材料。其形狀采用流線型,模仿真魚魚頭的形狀和大小比例。在魚頭的內部空間里安裝電源及控制電路,并在魚頭兩側魚眼處及在頭前部的偏下側安裝了3 個紅外傳感器,構成了一個探測左、前、右三個方向的傳感器網絡,讓魚具有自助避障的功能。
使用鋁合金制作的魚骨架把三個舵機串聯起來,魚骨架支撐起套于舵機外面的橡膠魚皮,便構成了了機器魚的魚身這個三關節的驅動系統。使用鋁合金制作的連接件將魚身通過螺紋連接的方式固定在在剛性魚頭上,魚身的橡膠魚皮使用熱熔膠粘在魚頭上,這樣便構成了機器魚的整體結果。具體如圖1 所示。實驗證明,這種方法簡單易行,且方便拆卸和組裝。
機器魚技術指標:巡游速度:1.2~1.5m./s;全電量巡游距離:4.5~5.5 千米;轉彎半徑:15~20cm。
2.系統組成及工作原理:
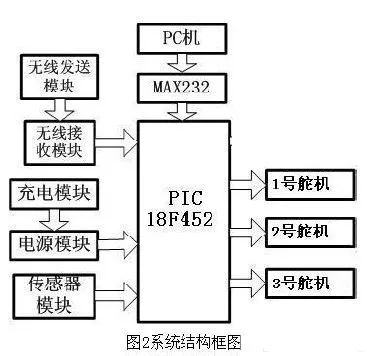
從功能上看,整個魚體的系統可以分成三大塊,分別是:感知區,決策區,行為區。感知區對應著多紅外傳感器網絡和無限傳輸模塊,而決策區指的是主控芯片(MCU),動作區對應著舵機串聯組成的三關節驅動系統。具體如圖2所示。本系統的最重要的工作集中在對多舵機的協調控制,因此主要圍繞舵機的控制工作進行細致詳盡的介紹。
3 舵機的控制
3.1 舵機的工作原理:
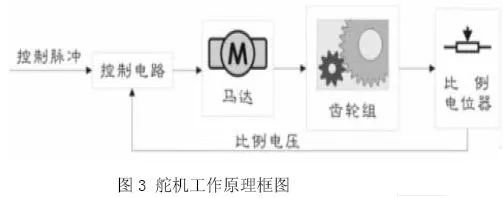
舵機主要由以下幾個部分組成:舵盤、減速齒輪組、比例電位器(位置反饋電位計)、直流電機(馬達)、控制電路板等。其工作原理:控制電路板接受來自信號線的控制信號,控制直流電機轉動,直流電機帶動一系列齒輪組,其齒輪組的輸出軸與一個線性的比例電位器相連,該電位器把輸出軸轉過的角度θ 轉換成比例的電壓反饋給控制電路,控制電路將其與輸入的控制脈沖信號比較,產生糾偏脈沖,并驅動馬達正向或反向地轉動,使齒輪組的輸出位置與期望值相符,令糾正脈沖趨于為0,從而達到使舵機精確定位的目的。舵機是一個典型閉環反饋系統,其工作原理由圖3 所示。
舵機的輸入線共有三條,紅色中間,是電源線,一邊黑色的是地線,這兩根線給舵機提供最基本的能源保證,主要是電機的轉動消耗。電源有兩種規格,一是4.8V,一是6.0V,分別對應不同的轉矩標準,另外一根線是控制信號線,一般為白色。
3.2 單舵機和多舵機的角度控制
3.2.1 單舵機的角度控制:
由舵機的工作原理可知,給舵機輸入一個周期在20ms 左右,脈沖寬度在0.5ms 至2.5ms 之間的周期性脈沖信號,驅動舵機輸出軸達到-90°到90° 之間的轉角,呈線性變化。并且無論外界轉矩怎樣改變,舵機的輸出軸都會保持在一個相對應的角度上,直到給它提供一個另外寬度的脈沖信號,才會改變輸出角度到新的對應的位置上。通過編程,借助單片機的輸出端口得到需要的周期性脈沖信號。
程序示例:(晶振為:4MHZ,脈沖從PORTDbits.RD0 輸出)
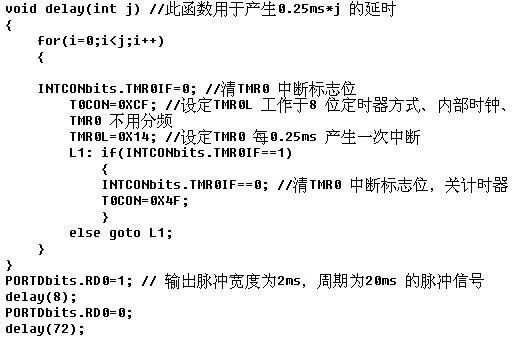
從上面的程序可知,通過改變delay 函數的形參j,可以根據需要,得到具有相應脈沖寬度和周期的脈沖信號。例如,改變以上程序段的1 至4 行為:
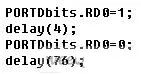
得到輸出脈沖寬度為1ms,周期為20ms 的脈沖信號,然后借助for 循環,將能得到所需要的周期性脈沖信號,驅動舵機輸出軸達到-90°到90° 之間的轉角。
3.2.2 多舵機不同角度的控制:
通過多舵機不同角度的控制,可以控制幾個舵機同時向不同角度扭轉,以達到預期的控制目的。
具體的實現方法是:在定時器延時函數中設定一個計時值t(在程序中t 在初始化時值為0),使t 在每次定時器計時完畢時加1。例如,定時器一周期的定時時間為0.25ms,則t值每加1 就相當于0.25ms。當t 的代表值達到20ms 也就是當t 等于80 時清零,這樣就可以將脈沖周期控制在20ms,再通過使用if 語句查詢方式,可以調節同一周期脈沖的脈沖寬度,即能使多舵機同時向不同角度旋轉。
程序示例:(晶振為:4MHZ,脈沖從PORTDbits.RD0,PORTDbits.RD1,PORTDbits.RD2三個端口中輸出)
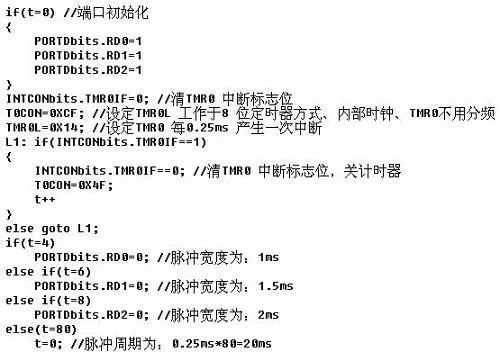
通過以上程序再配合for 循環,便能在PORTDbits.RD0,PORTDbits.RD1,PORTDbits.RD2三個端口得到脈沖寬度分別為1ms,1.5ms,2ms,周期同為20ms 的三種周期脈沖信號,從而達到對三個舵機同時進行不同控制的要求。當然利用以上的方法,可以很輕松地對3 個以上的多個舵機同時進行控制。
3.3 舵機的速度控制
通過舵機的特性可以了解到舵機的瞬時運動速度是由其內部的直流電動機和變速齒輪組的配合來決定的,在恒定的電壓驅動下,其數值是恒定的。但舵機的平均運動速度可通過分段停頓的控制方式來改變,例如,把動作幅度為90°的轉動細分為128 個停頓點,通過控制每個停頓點的時間長短來實現0°到90°變化的平均速度。也就是說,將90 度的連貫一步轉動變為128 個停頓的步進轉動,通過每步之間的短暫停頓可實現減速的目的,因為停頓時間非常短因此可看做是90°的連貫轉動,由于篇幅的限制,這里不再給出相應的程序實例,感興趣的讀者可以自己參考上面的程序實例進行編寫。
4.結束語
本文介紹的這種方法產生的PWM 波形精度高,能夠很好的完成舵機的控制工作,舵機工作穩定,我們設計制作的機器魚成功地實現了魚類的一些基本運動動作,如前游,加速,停止,前進中轉彎等,這也驗證了所采用的多關節驅動方式和對多舵機的控制方法是行之有效的。本文通過以仿生機器魚為載體進行撰文,意在拋磚引玉,希望對其它的舵機控制應用起到幫助。
-
PIC單片機
+關注
關注
64文章
693瀏覽量
102084 -
仿生機器魚
+關注
關注
1文章
2瀏覽量
1286
原文標題:基于PIC單片機的仿生機器魚的舵機控制
文章出處:【微信號:changxuemcu,微信公眾號:暢學單片機】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【OK210申請】仿生機器魚與水產海洋生物生態系統建模、分析與調節
★★★DIY6足仿生蜘蛛機器人 51單片機 WIFI控制★★★
四足仿生機器人
開源資料六足仿生機器人(原理圖+PCB+源碼等)

仿生機器魚_斌小狼的畢業設計
基于PIC單片機的仿生機器魚的舵機控制






 工商網監
工商網監
評論