 自動泊車系統(APS)詳細介紹
自動泊車系統(APS)詳細介紹
自動泊車系統(Automated Parking System,APS)又稱為自動泊車入位,顧名思義就是汽車不用人工干預,通過車載傳感器(泊車雷達)和車載處理器,來實現自動識別可用車位,并自動正確地完成停車入車位動作的系統。APS系統一般包括一個環境數據采集系統、一個中央處理器和一個車輛策略控制系統。
在不同的國家,落實不同場景的自動駕駛的意愿也不相同,唯一確定的是,大家都不愛停車,確切的說是不愛找車位和停車。這是整個汽車智能化和自動駕駛里面最迫切的需求,也是一個比較容易切入的環節。
目前很多車企推出的新車都有自動泊車功能。
自動泊車系統(Automated Parking System,APS)又稱為自動泊車入位,顧名思義就是汽車不用人工干預,通過車載傳感器(泊車雷達)和車載處理器,來實現自動識別可用車位,并自動正確地完成停車入車位動作的系統。它對于新手來說是一項相當便捷的配置,對于老手來說也省了些力氣。當您找到了一個理想的停車地點,不必再來回折騰,而只需輕輕啟動按鈕、坐定、放松,其他一切即可自動完成,徹底消除你在停車中遇到的麻煩。
APS系統一般包括一個環境數據采集系統、一個中央處理器和一個車輛策略控制系統。上述的環境數據采集系統一般包括圖像采集系統和車載距離探測系統(通過超聲波雷達或者毫米波雷達系統)。
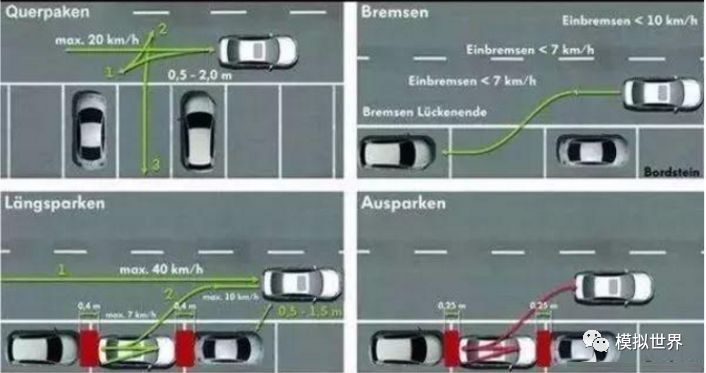
日常生活中側方向泊車(順列式駐車)較常見,停車時大多無人指導和幫助,泊車空間相對狹小,難度較大。為了順利的停車入位,我們先對順列式駐車情況做一下分析。順列式駐車要求汽車沿路邊平行停放,與其他停好的汽車排成一條直線。大多數汽車用戶需要比車身長出約1.2米的停車位,才能順利完成順列式駐車。通常情況下,駕駛員必須遵循以下五個基本步驟:
1、將汽車開到停車位的前面,停在前面一輛車的旁邊。
2、向路邊轉動車輪,以大約45°將車向后切入停車位。
3、當汽車前輪與前車的后輪平行時,駕駛員撥直前輪,然后繼續倒車。
4、當通過后視境確保與后面車輛保持一定距離后,駕駛員從路邊向外打車輪,將汽車前端回轉到停車位中。
5、最后,駕駛員在停車位前后移動汽車,直到汽車距離路邊約0.3米為止。
要實現正確的自動泊車,那么車輛就必須自動完成兩項重要工作。第一,就是能夠準確識別出可用車位。這里包括車位識別的速度以及準確性。第二,也是最為重要的,就是把車輛順利駛入車位中。自動泊車過程可以分為3個部分,分別是車位探測、路徑規劃和路徑追蹤:
車位探測就是利用超聲波傳感器等監測本車與路邊車輛的距離信息,判斷車位的長度是否滿足停車要求;
路徑規劃是中央處理器根據汽車與目標停車位的相對位置等數據,得出汽車的當前位置、目標位置及周圍的環境參數,據此規劃計算出最佳泊車路徑和策略;
路徑追蹤主要是執行路徑規劃,將相關策略轉化為電信號傳達給執行器,依據指令引導汽車按照規劃好的路徑泊車。
早期的自動泊車系統并不是全自動的,但這種系統的確使順列式駐車更加容易。駕駛員仍然必須踩著制動踏板控制車速(汽車的怠速足以將車駛入停車位,無需踩加速踏板)。然后,車上的計算機系統將接管方向盤。
當駕駛車輛沿道路行駛時,只要車速低于36公里/小時(每款車型時速的設定值會有不同),系統就會認為駕駛者有停車意圖,車輛便開始利用雷達探頭自動檢測周圍是否有合適的停車位置。一般車型自動泊車系統所設定的可用停車區域長度要大于車身1.2米以上 (最小長度是車身長度的1.2倍,約車長+0.8 m到1.2m),才可確認該區域屬于可停范圍。
當自動泊車系統找到合適的停車位置后,汽車移動到前車旁邊時,系統會給駕駛員一個信號,告訴他應該停車的位置。此時掛入倒檔,系統會提示駕駛者是否啟動主動停車輔助功能,確認啟動后,現在駕駛者就可以雙手離開方向盤了,車上的計算機系統將接管方向盤,計算機通過動力轉向系統轉動車輪。其方向盤將自動轉動調整車輛倒車方向,駕駛者只需要控制油門及剎車掌握車速(當駕駛者手握住方向盤,系統就會暫停工作)。
在倒車過程中,駕駛者需要適當控制車速和注意倒車雷達的提示音。當汽車向后倒得足夠遠時,系統會給駕駛員另一個信號,告訴他應該停車并換為前進擋。如果是報警音,則說明已于后車非常接近了。此時需要掛入前進擋,車子在前進的同時,系統將自動回輪,把車子的位置擺正。當將汽車完全倒入停車位時,屏幕提示信息更新為停車已完成,掛入空擋,輕松完成停車任務。
自動泊車系統通過傳感器系統感知環境信息,包括視頻傳感器(攝像頭),毫米波雷達,超聲波雷達等。根據傳感器系統的信息得出有效車位信息、車輛相對位置,從而決策泊車初始位置。電子控制單元(Electronic ControlUnit,簡稱ECU)根據傳感器信息,實時進行環境建模,生成車輛運動路徑,控制車輛無碰撞地自動運動到泊車位。早期的自動泊車系統通常由以下部件組成:
1、傳感器系統:通常選用性價比比較高的超聲波傳感器,以及360度環視視頻系統。超聲波傳感器一般有12個,位于前后保險杠上,它們發射超聲波信號,然后接收從障礙物反射回來的信號,并根據從發射到接收信號的時間長短來評估與障礙物的距離。車輛保險杠正前方前雷達監測距離為100cm,后方監測的距離為120cm,其中左前和右前外側距離傳感器用于探測停車位的長度和寬度。現在比較先進的全自動泊車系統,會結合選用毫米波雷達系統,距離檢測和抗干擾能力更強。比如,為了支持功能強大的自動泊車技術,奔馳S級提供了多達12枚泊車雷達。同時,360°攝像頭也能讓駕駛者在車內知曉車輛周圍的情況,必要時也可以親自介入停車動作。
2、駐車定位系統(PTS)控制單元:位于行李箱中左側,主要有以下作用,讀取各種電子元件輸入信號,如車速、擋位狀態、點火開關狀態、電動方向機的狀態等信號,促動車距傳感器和警告元件,通過Flex Ray總線與CAN網絡通信。
3、警告元件:前部警告元件集成于儀表中,當車速低于16km/h時,駐車系統切換至測量模式。后部警告元件位于后風擋玻璃上方,在車速低于16km/h時,警告部分亮起向駕駛員發出視覺警告。
4、電動助力轉向機構:由齒輪齒條式轉向機、扭矩傳感器(A91b1)、電動電動機(A91m1)和轉向機構控制單元(N68)組成,N68讀取A91b1的信號和來自ESP的輪速信號,據此促動A91 m1,從而帶動齒輪齒條式轉向機運轉,實現轉向功能。
5、轉向管柱模塊控制單元:讀取方向盤轉角和轉向角速度,并通過Flex Ray總線與CAN R絡通信。
6、車輛穩定系統控制單元:具有控制自適應制動、制動力分配(EBD)、防抱死制動(ABS)、起步加速防滑控制(ASR)、電子牽引輔助(ETS)、制動輔助(BAS)等功能疤通過分析各傳感器(如輪速傳感器)傳來的信號,然后向ABS、ASR發出糾偏指令(正確的控制指令),來幫助車輛維持動態平衡使車輛可以在各種狀況下保持最佳的穩定性。在轉向過度或轉向不足的情形下,穩定效果更加明顯。后輪驅動汽車常出現的轉向過度情況,后輪失控而甩尾,ESP便會迅速輕微制動外側的前輪來穩定車子(注意:此時制動,不會使車輪抱死,旨在降低輪速)。在轉向不足時,ESP則會迅速輕微制動內后輪,從而校正車輛行駛方向。
遍布車輛周圍的雷達探頭測量自身與周圍物體之間的距離和角度,然后通過車載電腦計算出操作流程配合車速調整方向盤的轉動。
該系統包括環境數據采集系統、中央處理器和車輛策略控制系統,環境數據采集系統包括圖像采集系統和車載距離探測系統,可采集圖像數據及周圍物體距車身的距離數據,并通過數據線傳輸給中央處理器。中央處理器可將采集到的數據分析處理后,得出汽車的當前位置、目標位置以及周圍的環境參數,依據上述參數作出自動泊車策略,并將其轉換成電信號。車輛策略控制系統接受電信號后,依據指令作出汽車的行駛如角度、方向等方面的操控,直至停車入位。
不同的自動泊車系統采用不同的方法來檢測汽車周圍的物體。有些在汽車前后保險杠四周裝上了感應器,它們既可以充當發送器,也可以充當接收器。這些感應器會發送信號,當信號碰到車身周邊的障礙物時會反射回來。然后,車上的計算機會利用其接收信號所需的時間來確定障礙物的位置。其他一些系統則使用安裝在保險杠上的攝像頭或雷達來檢測障礙物。但最終結果都是一樣的:汽車會檢測到已停好的車輛、停車位的大小以及與路邊的距離,然后將車子駛入停車位。
通過上面順列式自動泊車的例子, 我們可以總結一下,一個好的自動泊車系統必須包含以下三個部分:
(1)傳感器系統:該系統主要任務是探測環境信息,如尋找可用車位,在泊車過程中實時探測車輛的位置信息和車身狀態信息。在車位探測階段,采集車位的長度和寬度。在泊車階段,監測汽車相對于目標停車位的位置坐標,進而用于計算車身的角度和轉角等信息,確保泊車過程的安全可靠。
(2)中央控制系統:該系統為APS的核心部分,主要任務包括以下方面:
首先,接收車位監測傳感器采集到的信息,計算車位的有效長度和寬度,判斷該車位是否可用;其次,規劃泊車路徑,根據停車位和汽車的相對位置,計算出最優泊車路徑;再次,在泊車過程中,實時監測。
(3)執行系統:主要包括電動助力轉向系統和汽車發動機電控系統。根據中央控制系統的決策信息,電動助力轉向系統將數字控制量轉化為方向盤的角度,控制汽車的轉向。汽車發動機電控系統控制汽車油門開度等,從而控制汽車泊車速度。電動助力轉向系統與汽車發動機電控系統協調配合,控制汽車按照指定命令完成泊車過程。
自動停車系統APS的啟用需要滿足一定速度條件。APS對于車輛行駛速度有限制,一般在車速低于30km/h才可以啟用,從而進行車位探測。除了上述的側方向泊車(順列式駐車)外,一般也必須支持垂直方向泊車。自動泊車功能模式包括側方向泊車、垂直方向泊車,還可附帶自動駛出功能。有的車型具備側方向泊車或垂直方向泊車中的一種,以側方向泊車居多,有的車型同時具備這兩種模式。
車位識別時對所需車位的長度或寬度有最小要求。在車輛進行車位識別時,會根據執行自動泊車所需車位的最小長度或寬度來判斷車位是否可用。側方向泊車的情況下,一般要求車位最小長度是車身長度的1.2倍(約車長+0.8 m到1.2m);垂直方向泊車的情況下,一般要求車位最小寬度是車身寬度的1.5倍(約車寬+0.8 m)。
如果在泊車過程中,車輛制動、加速需要駕駛員控制,稱之為半自動泊車,之前大部分車型裝備的都是這類。現在很多車企正在開發不需要駕駛員控制的全自動泊車,一般會和無人駕駛技術結合起來。
對于傳感器系統, 以前, 從成本考慮,大多使用超聲波傳感器。超聲波傳感器探測距離為5~8 m,但無法識別車位線。如要識別車位線,需要增加攝像頭。現在,結合無人駕駛的傳感器技術, 包括毫米波雷達和激光雷達的使用, 探測距離和探測精度可以得到很大提升。360度環繞視頻系統的使用, 也對自動泊車系統的車位線的識別,駕駛員實時監測系統有了質的提高。
自動泊車系統APS的技術難點,主要有以下一些:
(1)車位探測與識別的精準度
超聲波傳感器近距范圍內不受光線影響,數據處理簡單快速,易于做到實時控制,在測量距離、精度方面能達到工業實用的要求,但是存在波束角太大、方向性差、分辨率低、作用距離短等缺點。而攝像頭具有數據獲取量大、圖像信息量大、可探斜側面物體的優點,但受環境因素影響較大、運算量大。
總之,當前的車位探測和識別手段各有優缺點,如何進一步提升探測與識別的精準度是APS推廣的主要技術難點之一。
(2)路徑規劃
路徑規劃是APS的重要內容,主要通過控制算法來實現。該過程分為3個階段,分別是車位外起始位置調整、泊車入位和車位內姿態調整。
?車位外起始位置要在控制算法中設定相應的距離、位置等條件,使得車輛位置滿足泊車條件;
?泊車入位階段要建立模型,進行合理的路徑規劃;
?在調整階段,應該針對車身相對于車位的位置和姿態進行系統分析,制定車輛在車位內調整的方案,確保車輛符合條件。
以上控制策略的實現,均需要大量的實際停車數據分析,并結合系統采集到的具體車位條件,將理論和實際結合,才能順利實現路徑規劃。
(3)泊車入位過程控制
泊車入位是APS執行機構按照路徑規劃控制車輛進入車位,是APS的重要環節。路徑規劃是在傳感器測量的距離信息的基礎上制定的,但是其測量結果受環境影響較大,容易形成誤差。因此,在泊車入位的過程中,應該注重對車輛入位過程的實時控制和調整,確保對環境數據的及時更新和對路徑的及時調整。
下面簡單闡述一下自動泊車系統的技術發展趨勢:
向全自動泊車發展
目前的APS還需要駕駛員的介入,未來將向更加智能化發展,實現全自動泊車,即在系統判定出合適的停車位后,駕駛員無需停留車內,系統完全自動泊車并熄火。
環境識別更加全面
對車位周圍環境識別趨于更加全面,如增加對車位線的識別,保證車輛停入車位線之內,可識別低矮的障礙物等,這需要在超聲波傳感器的基礎上增加攝像頭,或者使用攝像頭和毫米波雷達作為傳感器。
實現車庫自主泊車
在智能化車庫的配合下,由車庫與車輛之間的信息交互進行引導,實現車輛在車庫中的自主泊車。
-
傳感器
+關注
關注
2553文章
51390瀏覽量
756572 -
APS
+關注
關注
0文章
337瀏覽量
17575 -
自動泊車
+關注
關注
0文章
104瀏覽量
13728
原文標題:自動泊車系統(APS)簡介
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
端到端在自動泊車的應用

圍繞APS為中心與ERP、MES、PLM/PDM、SRM、WMS/TMS的多系統集成

智駕仿真測試實戰之自動泊車HiL仿真測試

安達發|APS高級排程高級物料需求計劃

基于APS排程系統的PDM功能
從小鵬M03自動泊車撞上奧迪聊聊智駕現狀
安達發|APS生產計劃自動排產軟件解決方案
宏景智駕自動泊車2.0系統征服高難度車位
超聲波雷達在APA自動泊車功能中的應用與仿真
APS排程系統助力新能源產業提升產能效益

智界S7將于六月全球首發自動泊車與召喚VPD商用功能
極氪007公測啟動,量產機械車位自動泊車業內首創
特斯拉全新自動泊車功能上線,可平行泊車
安達發|APS生產排程軟件6大核心技術






 工商網監
工商網監
評論