 干貨總結:室內定位技術的3大常用算法
干貨總結:室內定位技術的3大常用算法
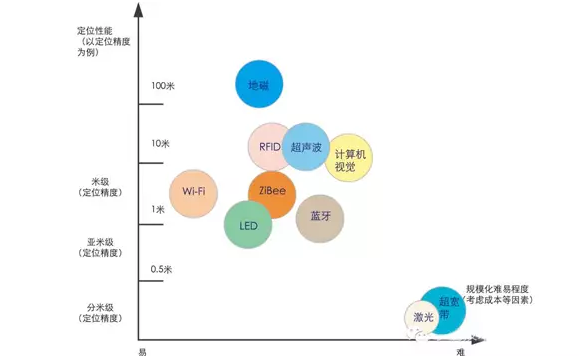
目前比較常見的室內定位技術有UWB(超寬帶)室內定位技術,藍牙室內定位,RFID(無線射頻識別)定位,超聲波定位,Wi-Fi定位等。但關于室內定位的算法,知道的人卻不多,算法決定了它的定位模式。室內定位種類雖然多,但是室內定位算法很多都是通用的,總結起來有下面3種常用的算法。
一、近鄰法
最簡單的方式,直接選定那個信號強度最大的AP的位置,定位結果是熱點位置數據庫中存儲的當前連接的Wi-Fi熱點的位置。
二、基于無線信號的三角測量法。
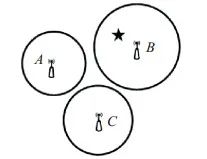
室內定位里面的三邊定位算法是怎么實現的呢?這個方法來自于傳統的定位方法,類似GPS定位。不過是實際使用過程中使用的是信號(RSSI值)衰減模型(如下圖所示)。原理是在離線狀態下,無線信號強度在空間中傳播隨著距離衰減! 而這個無線信號強度(RSSI值)對于手機上的接收器來說是可測的!那么依據測試到的信號強度,再根據信號衰減模型就可以反推出距離了。

當然,這種信號衰減模型是針對理想狀況(真空,無反射),在實際的室內復雜環境下,信號在不斷的折射反射(多路徑效應)下,這個模型可能就出現了波動了。也就是說你通過測量信號強度來反推距離很大可能帶有很大誤差,同時由于不同傳感器的信號特征不同,模型參數也不一而足,導致這個方法的定位精度有一定誤差。
三、指紋定位方法
這個方法也是針對無線信號定位的。
室內定位中的指紋定位法原理:首先在室內收集很多的指紋數據也就是無線信號數據,定義一個個的網格點來采集無線強度,并存入指紋數據庫。當需要定位的時候,通過手機采集到的無線信號和預先收集的指紋數據庫對比,找出最相似的指紋的位置作為定位的位置。

這幾種常見的定位算法也有各自的缺陷,如下:
(1)近鄰法定位精度得不到保證;
(2)三角測量法理論上精度較高,但在實際應用中,由于多徑效應和定位終端(通常是蘋果手機、安卓手機)不統一性,導致每個終端接收到的信號強度可能都有區別,進而影響定位精度和誤差的統一性(有的手機誤差可能小,有的手機誤差可能大,尤其是安卓手機);
(3)指紋法前期地圖繪制工作量大,而且一旦定位的場地布置臨時有變化,每個位置上的信號就會變化,從而導致定位不準。基站覆蓋范圍大,角度偏一點就會造成不小的誤差,更何況各種非視距和多徑環境的影響,造成一定的定位誤差。
天工測控(SKYLAB)專業致力于提供室內定位服務解決方案,在人員監控與物品管理方面形成了突出的產品服務能力,現已推出的藍牙室內定位技術基于藍牙beacon/藍牙網關/藍牙手環等硬件,配套定位算法、矢量地圖、服務器等,能夠實現3米的高精度室內定位和導航功能;UWB超寬帶定位技術,基于SKYLAB自主研發的uwb室內定位算法、uwb基站、uwb標簽等,最高可以實現0.1-0.3cm的超高定位精度。
SKYLAB的室內定位技術現已服務于醫院、展館、幼兒園、養老院、監獄等公共場所,比如吉林、深圳的部分婦幼醫院以及養老院、監獄等已成功采用SKYLAB的室內定位方案,全方面進行人員管理。
-
算法
+關注
關注
23文章
4630瀏覽量
93351 -
室內定位
+關注
關注
30文章
303瀏覽量
36603
發布評論請先 登錄
相關推薦
探討幾種常用室內定位技術
為什么UWB定位技術可用于室內定位?
基于UWB技術的室內定位方法簡述
常用室內定位技術探討

干貨:SKYLAB的室內定位技術能夠解決哪些問題呢?
室內定位中非視距的識別和抑制算法研究綜述





 工商網監
工商網監
評論