 淺談無損檢測行業中直角坐標機器人的運用
淺談無損檢測行業中直角坐標機器人的運用
工業應用中,能夠實現自動控制的、可重復編程的、多功能的、多自由度的、運動自由度建成空間直角關系、多用途的操作機。他能夠搬運物體、操作工具,以完成各種作業。關于機器人的定義隨著科技的不斷發展,在不斷的完善,直角坐標機器人作為機器人的一種,其含義也在不斷的完善中。
一 直角坐標機器人介紹
直角坐標機器人 (英文名: Cartesian coordinate robot),大型的直角坐標機器人也稱桁架機器人或龍門式機器人(英文名:gantry robot;德文名:Protalroboter)是能夠實現自動控制的、可重復編程的、多自由度的、運動自由度建成空間直角關系的、多用途的操作機。其工作的行為方式主要是通過完成沿著X、Y、Z軸上的線性運動。
直角坐標機器人主要由一些直線運動單元,驅動電機,控制系統和末端操作器組成。每一個機器人都是根據特定的要求的產生而設計的,設計的第一步就是要將使用要求分析清楚,確定設計時需要考慮的參數,包括:機器人的定位精度,重復定位精度;機器人的負載大小,負載特性;機器人運動的自由度數量,每自由度的運動行程;機器人的工作周期或運動速度,加減速特性;機器人的運動軌跡,動作的關聯;機器人的工作環境、安裝方式;機器人的運行工作制、運行壽命;其他特殊要求;下面是其主要特點:
1任意組合成各種結構樣式,帶載能力和尺寸的機器人,
2采用多根直線運動單元級連和齒輪齒條傳動,可以形成幾十米的超大行程機器人。
3采用多根直線運動單元平連及各帶多滑塊結構時其負載能力可增加到數噸。
4 其最大運行速度可達到每秒8米,加速度可達到每秒4米。
5 重復定位精度可達到0.05mm或0.01mm。
6 采用帶有RTCP功能的五軸或五軸以上數控系統能完成非常復雜軌跡的工作。
德國百格拉公司是世界上最著名的直角坐標機器人供應商之一,生產多種規格的直線運動單元/導軌、步進電機、交流伺服電機、直線電機和多軸數控系統。因末端操作工具的不同,直角坐標機器人可以非常方便的用作各種自動化設備,完成如焊接、搬運、上下料、包裝、碼垛、拆垛、檢測、探傷、分類、裝配、貼標、噴碼、打碼、(軟仿型)噴涂、目標跟隨、排爆等一系列工作。特別適用于多品種、便批量的柔性化作業,對于穩定提高產品質量,提高勞動生產率,改善勞動條件和產品的快速更新換代起著十分重要的作用。
百格拉公司的120多名專家及工程技術人員成功開發生產了各種規格的線性導軌,并在此基礎上與用戶密切合作開發通用及專用機器人,已為許多廠家提供了數千臺各種專用機器人及生產線。其中一個應用領域是無損檢測。在超大批量生產中,每個產品的主要功能,或整個產品的所有功能都要經過嚴格的100%的檢測。而且檢測周期要很短,來滿足超大批量生產的要求。
二 案例一————圓柱形航空部件無損探傷檢測
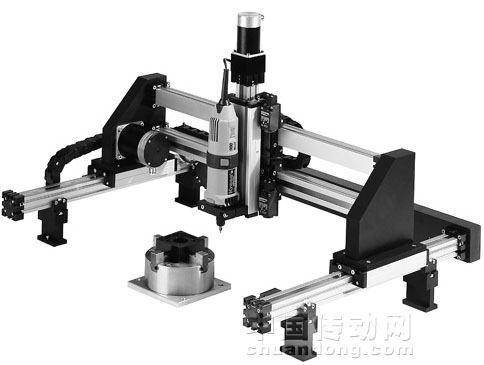
對于一些圓柱形的工件及設備,要達到全方位的檢測就非常的困難。本項目中為對航空飛船的圓柱形部件進行無損檢測,該部件高1000mm,φ500,需要進行從下到上的360度全面檢測。由于需要對該工件進行360度的檢測,并且檢測頭與工件要求時時保持固定的距離,所以對該機器人重復定位精度的要求就比較高,為0.05mm.
機器人方面我們選用的為德國百格拉二維直角坐標機器人, 兩個方向均采用PAS42形導軌,其中X方向選擇為PAS42BRM1000,Z方向選擇為PAS42BRM500.旋轉軸為德國百格拉VRDM31117步進電機加減速比為8的NEUGART減速機和一些輔助連接件構成的轉臺。具體結構如圖一所示。
控制系統我們采用的為德國ENGERHART公司的三軸數控系統進行控制,X軸與Z軸電機均采用德國百格拉公司SER31122伺服電機與減速比為8的NEUGART減速機來控制。由于整套設備采用了德國百格拉公司伺服電機與德國百格拉公司直角坐標機器人,所以完全保證了整個系統的精度,甚至于在整個系統重復定位精度檢測中多次檢測到了u級精度,大大提高了檢測的質量。
該系統的整個工作過程如下:首先數控系統控制X,Z兩軸聯動,運動于最下方的檢測位置,到達位置后通過I/O口控制檢測頭工作,然后控制旋轉軸以一定的速度旋轉一周進行檢測。以上完成了一圈的檢測,然后Z軸上移一定距離,進行下一圈的檢測,以后以此類推,最后完成整個檢測。
三 案例二————-超大型圓柱類鋼件無損探傷掃描
被測物體是8m長,直徑600mm的柱類鋼件,放在一個大型液體容器里。大型容器的兩端各有一個夾具,用于水平固定柱類鋼件。
機器人方面我們選用的為德國百格拉二維直角坐標機器人, 兩個方向均采用PAS42形導軌,其中X方向選擇為PAS42BRM1000,Z方向選擇為PAS42BRM500.其中X軸我們選擇的電機為百格拉SER31122伺服電機加上減速比為的64的NEUGART減速機。Z軸我們選擇的電機為百格拉SER31122伺服電機加上減速比為64的NEUGART減速機。
整個系統的工作過程為旋轉軸帶動長約8m的鋼件每旋轉一個角度X1后靜止,Z軸下到鋼件表面X2毫米高后停止。這時X軸開始運動,每移動X3毫米探頭掃描一次,完成X軸方向8m長的掃描后X軸和Z軸都處于靜止狀態。旋轉軸再按原轉動方向轉動X1度停止,X軸開設掃描運動。
所以整個過程需要機器人的動作保持高重復性,平穩性,并且要求定位極其精確。X軸的定位精度如下:電機每轉為16384點,經行星減速機64倍減速后為16384*64。X軸的驅動軸每轉一轉,X軸行走175mm,電機每轉一步X軸走175000/16384/64 =0.167 μm. X軸的定位精度如下:電機每轉為16384點,經行星減速機64倍減速后為16384*64。旋轉軸每轉一轉對應的周長是600*3.14 = 1884mm, 電機每轉一步旋轉軸表面轉過1884000/16384/64 =1.797 μm。實際上用不著這樣高的精度,而用精密行星減速機的目的是為了大量減少驅動電機與負載的轉動慣量比,來保證各軸的精確平穩運行。
四 案例三————-對儀表板進行無損探傷掃描
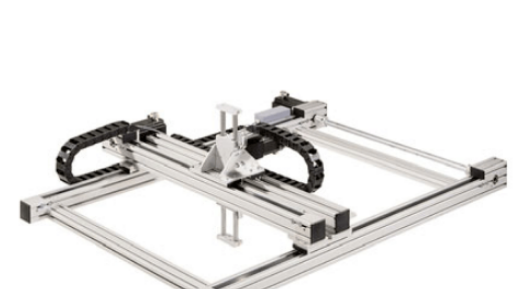
該系統要求采用超聲無損探傷對航天飛船上的許多部件進行無損掃描。該設備要求可對部件從上到下360°無損探傷掃描,掃描密度幾乎沒有限制,可以非常精密,也可以僅對部件的幾個關鍵部位進行無損探傷掃描。檢測工件的最大范圍為5400*5400*400 mm.
該套系統選用德國百格拉三維直角坐標機器人,其中X軸選擇為PAS44BRM5400,Y軸選擇為PAS44BRM5400,Z軸選擇為PAS44BRM400,同時,由于跨度為5400,所以對于Y軸我們選擇雙導軌結構,并且每200mm加固連接板的結構來防止撓度的出現。在Z軸下端上我們裝配可旋轉超聲探頭,探頭旋轉角度是0~360°。具體結構如圖三所示,圖四為檢測后的工件。
控制系統使用百格拉公司TLCC,驅動電機是百格拉公司智能伺服控制系統TLC612,TLC411實現定位控制。TLCC是一個專用工控機,通過CAN總線控制TLC伺服控制系統。TLCC可以預存很多部件的幾何數據,用于引導超聲探頭等距離或多方位、多角度的無損探傷掃描。得到的測量數據可以存儲在TLCC中,可以給出分析探傷的結果,可以打印或上傳給上位機,以便進一步保存和分析,也可以顯示出探傷掃描圖象及對應濾波,增強、放大、旋轉、特征提取及分析等。
總結及展望
本文講述了德國百格拉公司的直角坐標機器人配套超聲波掃描儀,在工件探傷中的三例應用。此外,德國百格拉公司的直角坐標機器人還被大量用于X射線探傷掃描。類似的應用還有配備CCD攝像機來檢驗和識別一些印刷品的質量。配備激光高度測量儀來對超大物體的三維形狀進行測量和檢驗,如大型鑄件和飛機上許多三維鋁板等。在許多測量工作中,德國百格拉公司的直角坐標機器人多年來運行非常穩定可靠。用德國百格拉公司的直角坐標機器人和直線運動單元可以很快組裝成幾乎所需的各種樣式尺寸的測試專用機器人,節省時間,人力和費用。北京兩家用戶用德國百格拉公司的直角坐標機器人和CCD攝像機來檢驗物體,兩年來機器人運行非常平穩。
-
機器人
+關注
關注
211文章
28646瀏覽量
208427 -
RTCP
+關注
關注
0文章
4瀏覽量
8612 -
驅動電機
+關注
關注
9文章
416瀏覽量
30800
發布評論請先 登錄
相關推薦
直角坐標機器人如何選型
直角坐標機器人在汽車發動機涂膠機上的應用
德國BAHR直角坐標機器人在無損探傷設備的應用
直角坐標機器人和關節機器人的特性及應用對比
直角坐標機器人的定義及主要特點
直角坐標機器人的結構組成及在鋁錠搬運中的應用
直角坐標機器人碼垛機的工作原理以及產品特點的介紹
直角坐標機器人技術在碼垛機上的應用將越來越多
直角坐標機器人&關節機器人的區別詳解
機械手的直角坐標|多關節|圓柱坐標|極(球)坐標式運行方式簡述
直角坐標機器人&amp;關節機器人的區別詳解

機械手的直角坐標|多關節|圓柱坐標|極(球)坐標式運行方式簡述
高效、精確、可靠的自動化設備——直角坐標機器人





 工商網監
工商網監
評論