") 交流接觸器動(dòng)態(tài)過(guò)程中彈跳控制方法和控制流程的研究
交流接觸器動(dòng)態(tài)過(guò)程中彈跳控制方法和控制流程的研究
引言
交流接觸器是一種廣泛用于電動(dòng)機(jī)控制、電氣傳動(dòng)以及自動(dòng)化控制領(lǐng)域中的電器設(shè)備。接觸器吸合動(dòng)作過(guò)程中由于觸頭之間以及鐵心之間的碰撞將會(huì)產(chǎn)生明顯的彈跳現(xiàn)象,如何減少這種現(xiàn)象是現(xiàn)今交流接觸器研究的一個(gè)重點(diǎn)。以往接觸器動(dòng)態(tài)控制的研究中,對(duì)于觸頭和鐵心閉合狀態(tài)的檢測(cè)有多種方法,如通過(guò)檢測(cè)觸頭或銜鐵的速度、位移等方法,判斷觸頭和鐵心的閉合狀態(tài)。現(xiàn)通過(guò)對(duì)吸合過(guò)程中線(xiàn)圈電流進(jìn)行檢測(cè),來(lái)實(shí)現(xiàn)交流接觸器動(dòng)態(tài)過(guò)程控制,從而改善動(dòng)態(tài)過(guò)程特性,達(dá)到減少動(dòng)態(tài)過(guò)程彈跳、節(jié)能的目的。
1 交流接觸器動(dòng)態(tài)吸合過(guò)程
交流接觸器電磁鐵主要由線(xiàn)圈和鐵心構(gòu)成,線(xiàn)圈通電后,通過(guò)電磁線(xiàn)圈產(chǎn)生電磁吸力,當(dāng)電磁吸力大于彈簧反力時(shí),帶動(dòng)銜鐵和動(dòng)觸頭運(yùn)動(dòng)。
交流接觸器要可靠運(yùn)行必須保證吸、反力特性的良好配合。
交流接觸器的吸合過(guò)程可以分為兩個(gè)階段:
(1) 觸動(dòng)過(guò)程。是指從線(xiàn)圈通電到電流增加到觸動(dòng)電流的過(guò)程,這一過(guò)程吸力小于或等于反力,動(dòng)鐵心處于靜止?fàn)顟B(tài)。
(2) 運(yùn)動(dòng)過(guò)程。是指動(dòng)鐵心開(kāi)始運(yùn)動(dòng)到完成吸合的過(guò)程,在這一過(guò)程中,吸力大于反力。當(dāng)吸力大于彈簧的反力時(shí),動(dòng)鐵心開(kāi)始運(yùn)動(dòng)直至動(dòng)、靜鐵心完全閉合,期間都包含著電磁、發(fā)熱、機(jī)械等過(guò)程。
吸合過(guò)程中電路上遵循電壓平衡方程,在力學(xué)上遵循達(dá)朗貝爾運(yùn)動(dòng)方程,在磁場(chǎng)上遵循麥克斯韋方程。這些相互聯(lián)系的方程構(gòu)成了描述動(dòng)態(tài)過(guò)程的微分方程組(1)。

式中
u———線(xiàn)圈勵(lì)磁電壓
R———線(xiàn)圈電阻
i、Ψ———分別為線(xiàn)圈電流及電磁機(jī)構(gòu)的磁鏈
m1、m2———電磁機(jī)構(gòu)運(yùn)動(dòng)部件( 下標(biāo)1、2 分別表示動(dòng)、靜鐵心) 歸算到鐵心極面中心質(zhì)量
x1、x2———電磁機(jī)構(gòu)運(yùn)動(dòng)部件( 下標(biāo)1、2 分別表示動(dòng)、靜鐵心) 歸算到鐵心極面中心位移
t———時(shí)間
Fx、Ff1、Ff2———相應(yīng)為折算到鐵芯極面中心處動(dòng)態(tài)吸力和運(yùn)動(dòng)反力( 下標(biāo)1、2 分別表示動(dòng)、靜鐵心),彈簧反力是位移的函數(shù),而空氣阻力則是dx1 /dt、dx2 /dt 的函數(shù)
Wμ———電磁系統(tǒng)的磁能
整個(gè)吸合過(guò)程是電能、磁能、機(jī)械能等能量的轉(zhuǎn)換過(guò)程。動(dòng)態(tài)過(guò)程的彈跳由動(dòng)鐵心的動(dòng)能決定,任一階段的動(dòng)能由吸、反力做功的差值決定,在反力做功已知的前提下,主要由吸力做功決定。
在運(yùn)動(dòng)部分質(zhì)量一定的情況下,減小運(yùn)動(dòng)部分速度就可減少?gòu)椞纯刂凭€(xiàn)圈上的電流就可減少運(yùn)動(dòng)過(guò)程中的彈跳。
2 交流接觸器電磁機(jī)構(gòu)電路模型與吸合時(shí)刻檢測(cè)
交流接觸器的電磁機(jī)構(gòu)簡(jiǎn)化電路模型如圖1所示。圖中:U(t)為線(xiàn)圈激磁,r 為線(xiàn)圈電阻,e 為線(xiàn)圈的感應(yīng)電動(dòng)勢(shì),λ 為磁鏈線(xiàn)圈的電感與導(dǎo)線(xiàn)的線(xiàn)徑,與匝數(shù)及鐵心的導(dǎo)磁率等因素有關(guān);在線(xiàn)圈參數(shù)一定的情況下,線(xiàn)圈電感在運(yùn)動(dòng)過(guò)程中是位移的函數(shù),與氣隙的大小有關(guān);在觸動(dòng)階段,動(dòng)鐵心的位移不變,線(xiàn)圈電感可以近似認(rèn)為是常量。
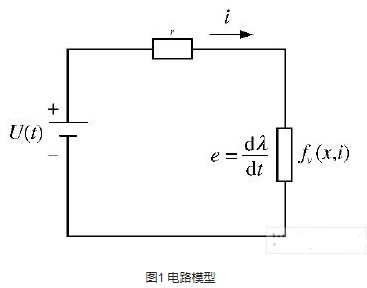

其中,時(shí)間常數(shù)τ = L /r,動(dòng)鐵心運(yùn)動(dòng)前可認(rèn)為是一常量。另外,線(xiàn)圈電流的變化還受到控制電壓合閘角度的影響,可設(shè)定輸入電壓和合閘角度,仿真求得線(xiàn)圈電流的軌跡。
交流接觸器吸合過(guò)程中由于電流的波動(dòng),依靠單點(diǎn)采樣吸合電流值檢測(cè)吸合時(shí)刻( 運(yùn)動(dòng)過(guò)程的開(kāi)始時(shí)刻) 并不準(zhǔn)確,這里采用一種電流積分方法判別接觸器的吸合時(shí)刻。當(dāng)吸力大于反力時(shí),動(dòng)鐵心開(kāi)始運(yùn)動(dòng)。對(duì)于同一電磁機(jī)構(gòu),動(dòng)鐵心運(yùn)動(dòng)需要克服的反力可認(rèn)為是一定的( 主要是彈簧的反力),對(duì)于不同電壓等級(jí),所需要的吸合電流不同,吸合時(shí)刻也不同,但在同一電壓等級(jí)下,通過(guò)試驗(yàn)分析,同一接觸器在吸合階段的吸合電流有效值是近似相同的,因此,可以采用在一定時(shí)間內(nèi)的電流積分方法來(lái)動(dòng)態(tài)檢測(cè)吸合時(shí)刻。下面是利用單片機(jī)控制實(shí)現(xiàn)電流采樣的計(jì)算過(guò)程。
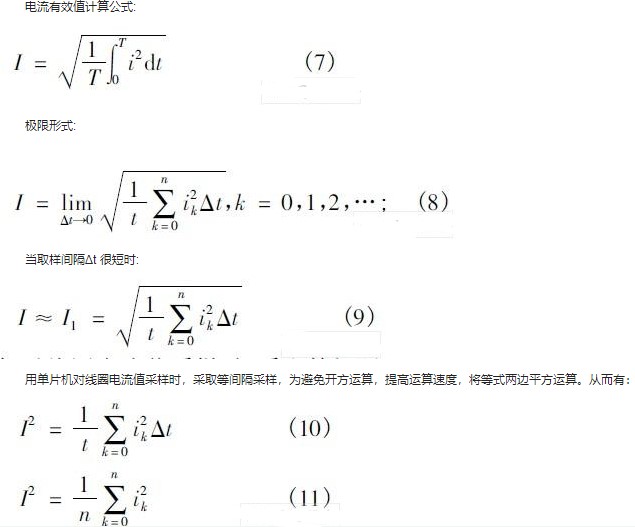
可通過(guò)提高采樣頻率,減小采樣間隔,來(lái)修正計(jì)算帶來(lái)的誤差。
3 交流接觸器動(dòng)態(tài)過(guò)程控制
電磁鐵的激磁方式分為交流激磁和直流激磁。交流激磁存在激磁能量可控性差、能量損失嚴(yán)重、噪聲大等問(wèn)題,為改善動(dòng)態(tài)過(guò)程,直流激磁方式逐漸被采用。
3. 1 控制原理框圖
整個(gè)控制系統(tǒng)如圖2 所示,由電源模塊、驅(qū)動(dòng)模塊、控制回路模塊、微控制器等組成。電源部分為驅(qū)動(dòng)模塊和控制器供電;微控制器為驅(qū)動(dòng)模塊提供控制信號(hào);控制回路控制電磁線(xiàn)圈的供電,并測(cè)量線(xiàn)圈電流作為反饋信號(hào),為動(dòng)態(tài)控制提供依據(jù)。

圖2 系統(tǒng)框圖。
3. 2 控制流程圖
吸合時(shí)刻的檢測(cè)利用線(xiàn)圈電流積分的方法來(lái)實(shí)現(xiàn)。將動(dòng)態(tài)過(guò)程進(jìn)行分段調(diào)整,以電流積分法檢測(cè)吸合時(shí)刻作為調(diào)整的標(biāo)志,整體控制框圖如圖3 所示。

首先對(duì)吸合控制電壓進(jìn)行檢測(cè),當(dāng)達(dá)到安全工作電壓后,開(kāi)始檢測(cè)控制電壓過(guò)零點(diǎn),以確定采樣的起點(diǎn),確定采樣間隔,之后進(jìn)行線(xiàn)圈電流的采樣,進(jìn)行吸合時(shí)刻的判斷,檢測(cè)到吸合時(shí)刻后,進(jìn)行保持階段的調(diào)節(jié),實(shí)現(xiàn)低電流保持,降低功耗。
4 試驗(yàn)對(duì)比分析
試驗(yàn)采用以上控制方法,以傳統(tǒng)交流接觸器線(xiàn)圈作為試驗(yàn)對(duì)象,在不同電壓等級(jí)下對(duì)整流后控制電壓有無(wú)反饋的控制方法做了對(duì)比試驗(yàn)。采用帶電流反饋的直流激磁控制前后波形的對(duì)比如圖4、圖5 所示。彈跳現(xiàn)象如圖6 所示。控制前后的試驗(yàn)對(duì)比數(shù)據(jù)如表1 所示。

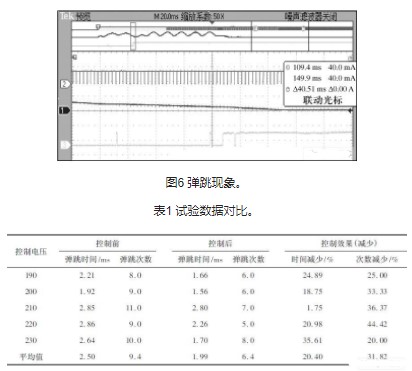
對(duì)控制前后不同控制電壓下吸合過(guò)程中的彈跳時(shí)間和彈跳次數(shù)進(jìn)行了對(duì)比,如圖7 所示。在不同控制電壓下,智能控制在觸頭彈跳時(shí)間和觸頭彈跳次數(shù)上效果,如圖8 所示。上述的數(shù)據(jù)和圖表表明,采用動(dòng)態(tài)反饋控制后,吸合過(guò)程觸頭彈跳時(shí)間和彈跳次數(shù)減少。由于觸頭的彈跳會(huì)產(chǎn)生電弧,而且彈跳持續(xù)時(shí)間越長(zhǎng),燃弧時(shí)間就越長(zhǎng),電弧產(chǎn)生的能量對(duì)觸頭侵蝕,碰撞對(duì)觸頭和電磁鐵磨損越嚴(yán)重,從而減少了電器的壽命。對(duì)在控制電源電壓Us的85% ~ 110% 范圍內(nèi)電壓(190、200、210、220、230 V) 下進(jìn)行實(shí)驗(yàn)的數(shù)據(jù)進(jìn)行求均后,計(jì)算得出采用動(dòng)態(tài)控制后觸頭的彈跳時(shí)間能夠減少20. 40%,觸頭的彈跳次數(shù)能夠減少31. 82%。

5 結(jié)語(yǔ)
通過(guò)以線(xiàn)圈電流積分的方法作為吸合時(shí)刻檢測(cè)的依據(jù),調(diào)節(jié)線(xiàn)圈供電,來(lái)減少運(yùn)動(dòng)過(guò)程的彈跳,試驗(yàn)結(jié)果表明該方法可明顯減少?gòu)椞臅r(shí)間和次數(shù)。通過(guò)電流反饋控制保持時(shí)線(xiàn)圈的電流,使線(xiàn)圈功耗降低。
-
線(xiàn)圈
+關(guān)注
關(guān)注
14文章
1839瀏覽量
44632 -
電動(dòng)機(jī)
+關(guān)注
關(guān)注
75文章
4128瀏覽量
97022 -
接觸器
+關(guān)注
關(guān)注
63文章
1200瀏覽量
64686
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
交流接觸器是什么意思
用于控制電容器組投切的新型智能交流接觸器

交流勵(lì)磁接觸器吸合動(dòng)態(tài)過(guò)程的仿真研究






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論