 基于CANoen協議實現DSP系統與上位機CAN的通訊
基于CANoen協議實現DSP系統與上位機CAN的通訊
1、引言
CANopen是一個開放的、標準化的應用層協議,在各種控制系統中得到了廣泛的應用。依靠CANopen協議的支持,可以對不同CAN廠商的設備通過總線進行實時通訊。
本文針對自主研發的全數字電機伺服驅動系統,使用CANopen通訊協議實現了CAN總線數字信號處理器(DSP)系統與上位機CAN卡之間的通訊,并通過測試實驗驗證了信息傳遞的可靠性,保證了全數字網絡化伺服驅動系統中對電機控制的快速性、準確性和實時性。
2 、通訊系統實現的基本原理
2.1 LF240x系列DSP的CAN控制器模塊
LF240x系列DSP的CAN控制器模塊,是一個完全的CAN控制器。具有以下特性[6]:
(1)完全支持CAN2.0B協議;
(2)對象有6個郵箱,用于接收和發送信息,其數據長度為0~8個字節;
(4)當發送出現錯誤或仲裁丟失數據時,CAN控制器有自動重發功能;
(5)總線錯誤自診斷功能;
(6)支持自測試模式。
2.2 CANopen協議
CANopen協議以CAN芯片為硬件基礎,有效利用CAN芯片所提供的簡單通信功能區實現工業控制網絡的復雜應用層協議要求。應用中應該注意以下幾個方面的內容:
2.2.1 對象字典OD(Object Dictionary)
OD是CANopen協議的核心概念[1],它是一個有序的對象組,每個對象用一個16位的索引值和一個8位的子索引尋址。CANopen網絡中的每個節點都有一個OD,包含了描述這個設備和它的網絡行為的所有參數。
2.2.2 CANopen 標識符
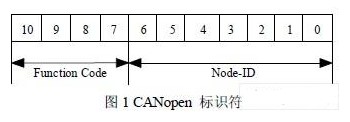
CANopen定義了強制性的缺省標識符(COB-ID)分配表。它是基于11位的CAN-ID,包括4位功能段(Function Code)和7位地址段(Node-ID),如圖1所示。文獻[1]中給出了CANopen預定義主/從連接集CAN標識符分配情況。
2.2.3 CANopen通訊機制
CANopen通訊模型定義了四種報文(通訊對象)[1]:
1) 管理報文NMT(Network Management)
用于網絡中主節點對從節點監控和管理。此消息不需要應答。NMT消息格式如表1所示。

2)服務數據對象SDO(Service Data Object)
SDO通過使用索引和子索引來訪問一個設備的OD。協議屬于確認服務類型。根據傳送數據的長度不同,有兩種傳送機制:加速傳送(最多4字節)和分段傳送(大于4字節)。發送和應答報文總是包含8字節信息,基本結構如表2所示:

3) 過程數據對象PDO(Process Data Object)
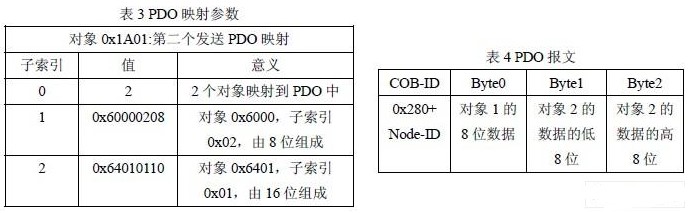
用于傳輸正常網絡操作中的實時數據。每個PDO在OD中用2個對象描述:PDO通訊參數和PDO映射參數。在此舉例說明PDO的使用方法。假設第二個發送PDO映射如表3所示,如果這個報文被發送,則由3字節組成,報文結構如表4所示。
4) 預定義報文或特殊功能報文
定義了三個用于同步,應急指示和時間標記的特定對象。用于配合以上三種通訊機制。
3、系統通訊的軟、硬件設計
3.1 CAN總線硬件設計
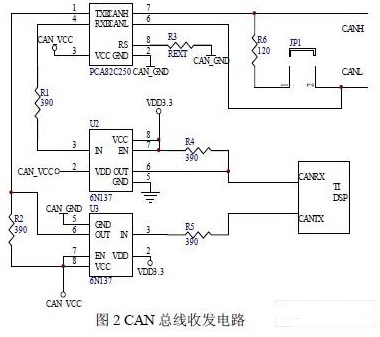
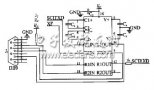
由于TMS320LF2407A芯片內自帶了CAN總線控制器模塊,使得CAN總線的電路設計變得非常簡單。將TMS320LF2407A的CANTX、CANRX引腳和CAN收發器PCA82C250的TXD、RXD引腳相連即可。CAN總線之間需要使用一個合適的終端電阻連接。為了進一步提高系統的抗干擾能力,可以在控制器和傳輸介質之間加接光電隔離器件6N137。電路原理圖如圖2所示。
3.2 CANopen協議對象字典OD的建立
本伺服驅動器通訊支持CANopen通訊子協議(DS301)和驅動設備子協議及運動控制命令(DSP-402)。在開發的過程中,根據應用的具體要求,將數字輸入/輸入模塊、電機及驅動設備、控制器、編碼器等設備類型及其相應的功能在設備描述的協議中進行了描述。建立的OD分為三個部分:
1) 通訊協議對象(Index 0x1000-0x1AFF)
定義設備類型,錯誤寄存器,廠商指定狀態寄存器,COB-ID同步信息,通訊循環周期,同步CAN信息窗口,以及設備名,軟硬件版本號等。另外SDO的通訊參數以及PDO的通訊和映射參數也在該部分定義。本設計中采用固定PDO映射,不允許動態映射。
2) 標準設備子協議對象(Index 0x6000-0x65FF)
定義三類信息:第一類是電機及驅動器的相關設備參數,如類型,廠商信息,分類號等;第二類是命令字和狀態字;第三類是位置、速度的相關參數。
3) 廠商指定協議對象(0x2000-0x20FF)
根據廠商需求,靈活定義所使用的變量。 此部分的使用使CANopen協議既保證了設備的通用性,又保證了系統良好的擴展性。
3.3 通訊程序的設計及實現
針對帶CAN控制器的TMS320LF2407A和PC機CAN卡之間的通訊進行了軟件設計。
TMS320LF2407A的CAN控制器的郵箱2配置為接收方式,郵箱3配置為發送方式。都采用標準信息幀格式(11Bit ID)。其中發送信息采用查詢方式,接收信息采用中斷方式,郵箱2用低中斷優先級。信息傳輸波特率設置為500Kbps。
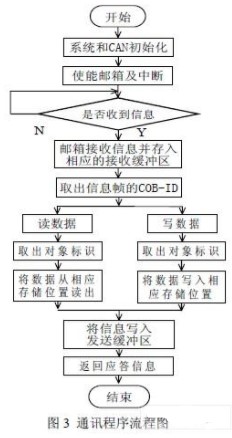
采用CANopen協議對設備進行控制的過程可以理解為用SDO對數據字典的讀寫過程。檢測設備對象的狀態或查詢設備當前信息時,可用SDO讀取數據字典中的對象;要對設備發布控制命令可利用SDO向相應的數據字典對象寫入數據。接收到信息幀時首先要將其命令字節(byte0)讀出,以確定下一步的讀寫命令處理。
信息幀的接收和發送均采用緩沖區的方式。讀操作時,發送信息幀長度為4字節,應答信息幀約定為8字節;寫操作時,發送信息幀長度約定為8字節,應答信息幀為4字節。
采用不同的發送郵箱發送數據長度不同的信息幀。本程序設計中,采用郵箱4發送4字節長度的信息幀,采用郵箱5發送8字節長度的信息幀。這種方式可以提高信息傳輸的效率。軟件設計流程圖如圖3所示。
4 、測試結果
為了測試CAN總線DSP系統與PC機CAN卡之間的通訊情況,采用VC++編寫了友好的人機界面(見圖4)。進行通訊測試時,首先要選擇通訊端口,設置通訊波特率,ID屏蔽位,信息幀格式及傳輸數據的格式(十進制或十六進制)。特別需要注意PC端設置的通訊波特率要和DSP端的通訊波特率保持一致。然后打開CAN總線端口,選定發送SDO的功能段及地址段,填寫信息幀長度(以字節為單位)及內容,即可進行通訊測試。
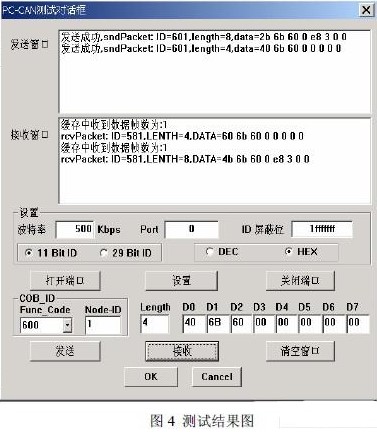
例如,要將1號地址的電機輪速期望值設為0x3E8,電機輪速期望值在OD中的索引為0x606B,使用啟動域下載協議,加速傳輸。則設置地址段為1,信息幀長度為8,信息幀內容為2B 6B 60 00 E8 03 00 00。發送成功后返回應答信息幀內容為:ID=581,LENTH=4,DATA=60 6B 60 0 0 0 0 0,說明寫入操作正確(見圖4)。
要將1號地址的電機輪速期望值讀出,即讀出OD中的對象0x606B,使用啟動域上傳協議,服務器使用加速傳輸方式應答。則設置地址段為1,信息幀長度為4,信息幀內容為40 6B 60 00 00 00 00 00,發送成功后返回應答信息幀內容為:ID=581,LENTH=8,DATA=4B 6B 60 0 E8 03 0 0,說明讀取操作正確(見圖4)。
5 、結束語
本文用CANoen協議實現了CAN總線DSP系統與上位機CAN的通訊,實現了控制系統的數字化、模塊化,并保持了系統的可擴展性,為提高伺服驅動系統的智能化水平奠定了堅實的基礎。
-
dsp
+關注
關注
554文章
8059瀏覽量
350461 -
CAN總線
+關注
關注
145文章
1955瀏覽量
131101 -
電機
+關注
關注
142文章
9088瀏覽量
146387
發布評論請先 登錄
相關推薦
基于DSP的CANopen通訊協議的實現
基于LabVIEW和J1939協議的CAN總線通訊平臺開發




利用CAN通信實現電機控制器上位機監控系統
【Z站推薦】CAN接口卡如何解決上位機系統的調度延時問題?






 工商網監
工商網監
評論