 淺析自動駕駛算法開發思路
淺析自動駕駛算法開發思路
就目前的自動駕駛發展情況來看,功能產品解決方案應該從特定區域的低速自動駕駛產品做起,而后逐步發展到高速公路、環路等結構化道路并至直復雜城市工況下自動駕駛產品,這些產品形態應是融入到整車功能/外觀等設計的前裝產品,而非簡單后裝集成;那么該如何進行自動駕駛算法研究呢?
智行者在關鍵技術突破的基礎上,將重點開發專用于自動駕駛的仿真/研發平臺產品,來幫助客戶提高研究效率和質量。此外,將嘗試建立一套包含執行器及自動駕駛算法開發的生態平臺來整合多方資源,且此平臺應該是開源和互相促進的,從而提高自動駕駛算法整體開發質量。并做了一個2016-2020年的5年規劃。

首先介紹其自動駕駛算法體系。
借鑒駕駛員行為研究中常用的Strategic level(戰略層)、Tactical level(戰術層)及Operational level(執行層)三層架構來描述算法研究體系。通常來講,戰略是頂層,包括目標及路徑方向;戰術是支撐,包括具體行動、路徑選擇等;而執行是落地,即具體實現選擇的路徑。既然自動駕駛最高境界是能夠模擬優秀駕駛員的駕駛行為,那么顯然也可以用這三層結構作為自動駕駛算法的研究體系。
具體說來:在Strategic level上,我們關心的仍是自動駕駛亙古不變的三個問題:Where am I?(我在哪) Where will I go?(我去哪) How to go?(怎么去)。“我在哪”可以廣義上引申為當前處于何種狀態,這種狀態不僅包括地理位置,還包括運動參數等狀態;同樣,“我去哪”可以引申為欲之達到的狀態,而“怎么去”則是采用方法、使用工具等。
在此宏偉戰略指導下,我們將自動駕駛研究中老生常談的Percepiton(感知)、Decision(決策)及Control(控制)視為Tactical level的三個組成部分;但Strategic及Tactical兩層中元素并非一一對應,而可能是一對多或多對一的關系;在Operational level中,就是各項關鍵技術,如基于視覺、雷達的目標識別問題、全局及局部路徑搜索問題、汽車動力學控制等。
可以看出,實際上我們絕大部分時間和精力都在同各項Operational level的具體技術打交道,并自然認為如各項子技術的指標(如識別率)能夠達到100%,則整體系統指標也就達到100%,這種研究思路行得通嗎?借用威靈頓將軍名言:“要打勝仗就得靠優秀的戰略,但一位優秀的將軍不會將軍事戰略建立在全靠優秀士兵基礎上”。這句話我們理解有兩層含義:一是客觀上不是所有士兵都是優秀的,對應于自動駕駛,可翻譯為傳感器永遠是不完美的、決策是會有失誤的、控制是有誤差的等等,這就需要從戰略層進行融合、互補;二是一個優秀戰略戰術需要根據士兵、裝備情況而靈活機動,如小米加步槍則應選擇游擊戰,而飛機坦克則可進行正面交鋒。對應于自動駕駛,可簡單理解為在不同的道路場景下需要調整傳感器或算法方案(如特定區域下低速行駛只需要差分GPS、單目及超聲波組合,高速公路可采用單目及毫米波,而在復雜交通環境(如宇宙中心五道口)的話激光雷達則必不可少)。
總結兩點:一是任何傳感器組合方案都應該視時、視情而變,需要綜合考慮用戶需求、成本及場景復雜程度;二是很期待既能包打天下性價比又很高的傳感器組合出現,但相對于性價比,功能穩定實現顯然更重要。

其次,想討論下Perception、Decision及Control三者的地位和關系。
很多研究機構介紹其自動駕駛研究水平時,通常是展示其視覺或雷達識別效果,并由此得出結論:基于小數點后4個9的識別率,最遠距離能達100米,于是自動駕駛系統完全能達到上路水平。對此,不免生疑:難道駕駛員水平高低可以用其視力水平來衡量么?
答案顯然是否定的,否則交管局和駕校也不樂意啊。為什么會造成這種現象呢?有兩種可能性:一是駕駛水平高低不好衡量,也就是沒有公認客觀的標準,但畫框子顯然就好解釋多了,即標準很統一,無異議;第二就是我們覺得最郁悶的一點,許多研究者中眼里自動駕駛研究天然就等同于感知研究,正如同下圖所示,即認為應該以感知為中心,決策控制用簡單方法就可以搞定,無需大量研究。
暫且無論第二種認識的對錯,我們先以人工駕駛為例說明。通常我們稱駕駛技術好的為老司機,技術差的為新司機,顯然老司機同新司機的最大差別并不是視力或其它感知方面差距,而在于老司機擁有更豐富駕駛經驗、處理突發狀況能力及手腳協調能力等,而視力只是成為駕駛員基本入門條件。相信理解了這一點,那么我們就絕不會使用簡單識別率指標來衡量自動駕駛算法水平高低,感知、決策及控制研究都同等重要,只不多各家研究重點不同而已;那么到底該如何準確地評價自動駕駛水平高低,接下來我們將會專門分析。
在研究中,我們認為應將自動駕駛研究對象充分融入到整個“人-車-路”交通系統下進行分析,而非只考慮單車功能實現,這是一個非常重要的思想,也是我們研究的根本出發點。試想一下,如果一輛自動駕駛車輛只考慮自身功能實現,沒有同其它交通參與者形成良性互動,即無法理解其它目標駕駛行為同時也時常做出旁車無法理解的非常規動作,那么它顯然不能稱之為一輛高水平的自動駕駛車輛。
對于如何將“人-車-路”系統融入至自動駕駛算法開發中,我們認為有必要首先回答以下六個問題。
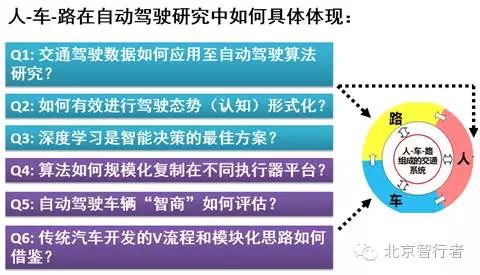
同時,這六個問題也對應智行者確定的如圖所示的六個關鍵研究方向。

1、駕駛場景大數據采集與應用
駕駛場景數據采集是基于車輛、傳感器等硬件平臺,通過對實際交通環境數據進行采集并后處理,來分析潛在的駕駛行為,并用于進行算法優化和評估。
舉個栗子說明:某世界知名主機廠的ACC在歐洲和北美市場受到消費者的好評,但在中國卻處境尷尬,問卷調查反映:該ACC設置跟車距離保守的話將造成鄰車頻繁切入,而激進的話則駕駛員會造成心理不適,這說明該ACC難以適應復雜中國道路環境和駕駛員行為習慣,因此需要在中國進行交通數據采集來優化其關鍵參數。
說到這里,便出現一個很有意思的詞—“復雜環境”,可以大膽地說,“復雜環境”絕對是環境感知類碩博士論文題目中出現的高頻詞,國內外均是如此。那么究竟什么交通環境才能稱為“復雜”?我們認為有兩點:一是目標數量、種類多,即人車混雜、分布稠密,這是通常目標識別中所謂的“復雜環境”;第二是目標行為復雜,及行為多變、難以預測,例如鄰車突然加塞(merging),電動自行車等違規行駛等。顯然,當前對第二個復雜點研究和關注較少,而其基本研究方法首先就需要真實交通場景的大數據作為支撐。
2、駕駛能量場及其應用
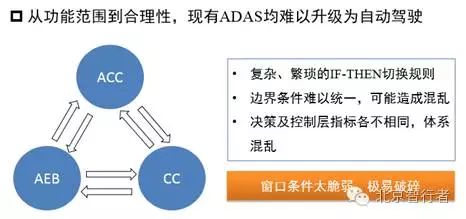
記得數年前某位國外知名主機廠高管曾說過,自動駕駛對他們來說就是分分鐘的事情,因為在他看來縱向控制就是“ACC+CC+AEB”,集成現有成熟技術就可以了。對此,我們只能說:自動駕駛跟ADAS真的半毛錢關系都沒有,如果有,最多也就半毛錢。
為什么不贊成用ADAS集成思路來進行自動駕駛算法開發,原因有二:
一是ADAS本身存在一定弊病:還是以ACC/CC/AEB為例,三者之間存在復雜、繁瑣的IF-THEN切換規則,同時現實交通的復雜性又導致切換邊界交叉區域重疊,極易造成混亂;另外三者控制指標還不相同,體系混亂。在這么混亂體系下自動駕駛算法還是最好別添亂了。
二是ADAS設計理念同人類駕駛理念大相徑庭。任何一個駕駛教練都不會教授學員去如何穩定跟隨前車,或如何保持恒定車速。駕駛員在Car Following時通常會與前車保持一定安全界限,但安全界限不是安全距離,它難以用距離、THW或TTC等具體指標來進行描述;在Free Driving駕駛員操控動機更加復雜,車速會受到駕駛員心理、道路質量、天氣等多方面影響,沒有一個駕駛員會奇怪地保持一個速度行駛。
歸根結底以上討論的本質為決策中駕駛態勢形式化(或認知形式化)的問題。在這種情況下,借鑒擬人化駕駛思路,我們構建一種基于“能量場”的人、車、路駕駛態勢分析方法來為后續決策、控制算法提供維度固定、準確可靠的認知形式化基礎。
基于“能量場”進行決策控制基本原理可描述為:如下圖,在駕駛過程中,任何干擾因素(車輛、行人、道路、交通標志甚至天氣)都將直接或間接的影響駕駛動作,如這些因素以某種能量進行描述的話,那么理想駕駛狀態應遵循這些能量的某種平衡。該方法關鍵問題在于能量場模型建立、平衡態模型就工程化問題,后續將進行詳細討論。
3、基于深度學習的自動駕駛決策控制研究
鑒于深度學習在圖像識別領域取得的巨大成功,結合駕駛大數據,它或許能真正革新傳統Rule-based決策方法,甚至于改變整套自動駕駛算法體系。
我們首先開展工作是驗證端到端的模型的合理性和有效性,基本思路源于nvidia的這張圖,即CNN訓練輸入端為相機圖像,輸出端則是執行器參數。
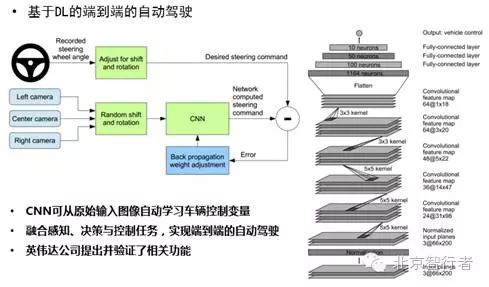
鑒于對此方案效果仍無十足把握,我們選擇采用仿真方式進行驗證,以提高效率和避免實車實驗風險。仿真平臺采用Vrep+Matlab,在Vrep中我們搭建了前后安裝兩個單目相機的藍色小車,場景主要包括車道線、固定障礙物及動態隨機干擾車輛,數據采集通過人工遙控方式進行。經過多人次、多圈的數據采集及在Matlab中進行網絡訓練,我們最終在同樣環境下進行測試,但遺憾的是效果遠低于預期,更是遠比不上傳統方法。原因可能是多方面的,如模型合理性、訓練數據量、網絡結構等,同時這也告訴我們一個道理:即使DL是真正解決之道,但也不要妄想能夠很快的達到甚至超過傳統方法水平,還需要很長路要走。
4、執行器性能評價體系
相信IT界同行們搞自動駕駛一開始都有一個疑惑:為什么主機廠搞自動駕駛還要改車,難道沒有底層執行器協議么?存在這個疑問同志需要先腦補下EPS/EVB/ESP等執行器基本原理和國內發展現狀,同時還需要知道汽車界有一個比主機廠還牛的叫博世的供應商,他就是不給開放你又怎么的。在這種凄慘背景下好學的中國自動駕駛研究者們被活活逼成執行器改裝大師,稍不注意還形成了所謂底層核心技術。
這種條件下開發自動駕駛弊病是明顯的:由于執行器改裝可靠性和一致性較差,即使上層算法再好,那也難以將其進行大規模復制,而單車單調顯然將造成巨大的人力和效率的損失。許多算法研究都提出執行器自適應的方法,但目前終歸還是處于學術研究階段。不妨換一種思路:如果上層算法開發者能夠提出與其算法相關的執行器關鍵指標及其范圍,同時該指標能采用簡單方式進行可靠測量,那么就可以將這部分工作轉嫁到執行器供應商中,從而在理論上應可實現算法規模化復制。實際上這就是執行器性能評價體系建立的問題,也是智行者當前面臨實際項目正在攻關的一個方向。
5、車輛“智商”評價指標及體系
車輛“智商”是自動駕駛水平高低的表述,它的重要意義在于:
一是其為算法開發的重要導向。例如,對于無人車比賽來說同等情況下跑得快的肯定比跑得慢分數高,這就使得各支車隊將把速度提升作為重要研究內容。
二是它是自動駕駛車輛頒發“運營合格證”基本評測依據。這一點是算法開發引導的重要抓手和支撐,這里面蘊含著巨大的商業機會,原因你懂的。
回到現實中自動駕駛開發,我們認為當前仍缺乏一套合理且易于操作的評測體系。跑的快就一定代表自動駕駛水平高嗎?當然未必,回想一下我們如果想由衷贊美領導駕駛水平高的話,我們通常會說:真是又快、又穩、還省油,這不經意間我們道出汽車行駛三大終極評價指標—安全、舒適、節能。如此說來,跑得快既不利于安全,又不感到舒適,更談不上節能,為何卻成為大家公認評價指標呢?作為一個老參賽隊員我認為原因有二:一是比賽終歸是比賽,總得有個簡單、粗暴、好打分的指標,太復雜反而有異議;二是跑得快一定程度上證明算法穩定可靠,是一種極限能力的體現,就如同最高車速、最大爬坡度是汽車性能評價指標一樣。
因此,雖然當前各家算法“智商”高低都是依據其核心人員的自我標準來估計,但相信未來車輛“智商”評價方法應集合多家研究機構共同智慧,形成有益的標準體系,并應有三方或權威機構來進行組織、實施和認證。
6、基于ROS/VREP開發及仿真平臺建設
作為一個長期參與調車和比賽工程師來說,雖然以前不知道仿真究竟有多么強大,但著實覺得基于實車進行算法調試實在太Low、太低效了,當然絕不是說實車調試不對,而是如何有效的提高效率和算法質量。
我們做夢都希望能夠擁有這樣一個自動駕駛集成開發平臺:虛擬仿真同實車調試應是無縫的,應是召之即來、來之能用、用之能戰,不存在移植這一說;同時仿真平臺的傳感器、道路及車輛模型等應最大程度接近于真實。
基于以上考慮,我們選擇ROS/VREP組合來實現。ROS最近在自動駕駛圈里很火,很多大牛寫文章推薦,連BMW都開始湊熱鬧。我們采用ROS初衷很樸實:開源免費、同VREP有現成接口,同時該平臺能夠模塊化組織,能夠為下一步開源打下基礎;選擇VREP原因也很樸實:開源免費、同ROS有現成接口,當然其強大功能也值得一試(例如包括Velodyne等多種激光雷達傳感器)。
總得來說,我們深知要搭建一套實用、多場景的仿真系統見效慢、難度大,但在飽受實車調試之苦后,我們也將繼續堅持。
以上就是這六項技術的總體闡述,下面將就其中第1項:駕駛場景大數據采集與應用進行專題介紹,并利用同Daimler及上汽實際合作項目進行舉例。
駕駛場景大數據采集與應用
1、研究動機及目標
正如同人類對大腦運行機理認識之膚淺一樣,自動駕駛研究者們對人類駕駛行為機理認知及建模也是束手無策。這直接逼得小伙伴們紛紛將希望寄托于采用深度學習來模擬人類駕駛行為,正如此前炒得火熱的George Hotz公開的源碼一樣,索性拋棄所謂行為機理研究,直接端到端一湊,黑匣子加大數據使勁訓練,立馬就可以上路,搞得傳統研究方法貌似不再具有研究價值。
冷靜!畢竟我們目前沒有復現出,也沒有看到國內有機構復現出該端到端方法的有效性。即使能夠拿出吃奶的勁復現出,且不說效果如何,還有一大堆爛攤子需要解決:端到端外網絡輸入是否還有其它選擇、網絡設計復雜程度能否降低、big data究竟要多big才算big、現實場景超出訓練范圍如何處理以及如何處理與傳統規則方法的關系等。
正如在上文中說到:即使DL是真正解決之道,但也不要妄想能夠很快的達到甚至超過傳統方法水平,還需要很長路要走。所以奉勸在微信群里歇斯底里膜拜以及認為已經找到朝圣之路的童子們需要冷靜、理性地對待新技術:自動駕駛復雜程度注定了不可能有一種技術包打天下,再牛逼的技術充其量也只是解決其中一個小小的分支;自動駕駛技術行業不同于IT等行業,安全底線和苛刻成本要求注定其只有選擇最保守的升級模式,操作系統死機了就重啟這種“絕招”是絕對不允許在汽車上出現的。
回歸到討論中來,要研究駕駛行為,首先需要回答以下幾個問題:
什么是駕駛行為?
為什么要研究駕駛行為,研究什么內容?
如何研究,預期目標是什么?
1)什么是駕駛行為?
“駕駛行為”同“復雜環境”一樣都屬于神奇的詞語,無論怎么定義別人都可以挑出毛病,而且都很有道理。在筆者博士論文研究時還專門調研了國外同行怎么理解這個詞,最終發現表述也是五花八門,并無權威定義,例如可常見以下關鍵詞Driver behavior,Driver decision, Driving event及Driver intention等混用。
在這里我們沒有必要糾結該如何給駕駛行為下一個準確的定義,暫時采用一個能用于解決實際問題的定義,這里厚臉皮的截取筆者博士論文中一段論述:



注意,以上研究實際上是智能車如何理解其它車輛目標的行為,而非本車駕駛行為。我們需要換個角度思考,其它車輛的駕駛行為也正是智能車所要學習的對象,而不僅僅是學習本車駕駛員行為。
2)為什么要研究駕駛行為,研究什么內容?
雖然駕駛行為研究重要性能夠得到廣泛認可,但在實際開發中卻有意無意的被忽略,某些時候甚至陷入認識誤區。以換道行為舉例,在某些公開自動駕駛演示數據統計中,經常把換道次數作為一項重要參考指標進行宣傳,且無論是開發者還是第三方都認可一個觀點:換道次數越多則證明自動駕駛功能越好。
但實際交通情況下并非換道次數越多越好,某些不文明的換道還經常上朋友圈亮相。因此,自動駕駛行為好不好要看其在特定場景下是否合理,而非其功能有多么復雜,或復雜行為出現頻次,就好比歌手不恰當的炫技將會使得聽眾狂噓,全程飆高音也證明不了歌唱水平高一樣。
那么如何理解一個換道行為是否合理?這里首先從學術研究上捋一捋換道行為全過程:
換道動機產生:即此場景下為什么要換道,是前方十字路口左轉需要換道(mandatorylane-changing),還是嫌棄前車龜速,抑或前面是個油罐車,得趕緊離它遠遠的(free lane-changing)。總之,得有一個合理的作案動機。
換道可行性:mandatory lane-changing比較復雜,還需要分析感興趣目標行為,例如它是否允許你加塞;free lane-changing比較簡單,分析目標車輛運動學關系即可。
換道執行:換道執行也分為三六九等,例如可按正常方式進行,也可加速超越鄰車換道,當然還有減速禮讓鄰車先行后再換道。合理的執行方式非常重要,例如你總不能在鄰車讓你加塞的情況下還慢悠悠地換過去吧,這時候最佳策略是:麻溜地趕緊換過去,要不過這個村沒這個店了。
實際上上述換道過程體現的就是一個真實自然駕駛人的思考和操作的過程。推而廣之,任何行為都分解為:動機、可行性分析及執行三個子模塊,但當下對動機研究卻少之又少,從而出現前述單純以換道次數作為評價指標的現象,希望以后類似演示或比賽中能夠公布一些關鍵行為的支持數據和邏輯來證明其合理性,或者通過主觀問卷調查也可以,那樣至少能夠體現出我們對于自動駕駛認識及開發的深度和專業性。
具體到駕駛行為如何確定,可由一句話歸納:通過對地圖、外界命令及道路交通狀態綜合判斷來確定自動駕駛行為。這句話包括兩層含義:一是地圖及外界命令可確定駕駛行為,例如地圖告訴系統前方100米十字路口要左轉,則當前不在左轉道的話則要盡快左換道,這屬于命令驅動行為,不在本研究范圍內;另一種是行為由駕駛員及道路狀態所驅動,如駕駛員想尋求速度優勢,或遠離前方危險車輛等,這是本主題所研究對象。
除了動機研究外,駕駛行為研究還包括目標行為預測研究:如在戴姆勒Gavrila教授論文“ Will the Pedestrian Cross? AStudy on Pedestrian Path Prediction”中,正是在行人識別基礎上來預測該行人是否有橫穿馬路的行為趨勢,從而指導ADAS或自動駕駛做出合理的決策。由此可見,目標行為預測是多么重要,從另一個角度來講這實際上是一個多目標體運動博弈問題,當然這就扯的更遠了。
3)如何研究,預期目標是什么?
前面已說到,DL或許是一個很好的思路和方法,但短期內我們還是想找一些更具清晰數學模型,更簡潔快速的方法。基于清華大學同戴姆勒等車企合作項目基礎,我們認為駕駛場景大數據采集是一個不錯的方法;當前國內許多主機廠也認可了這種方法,例如智行者科技同上汽當前正在開展的針對于自動駕駛的數據采集項目。
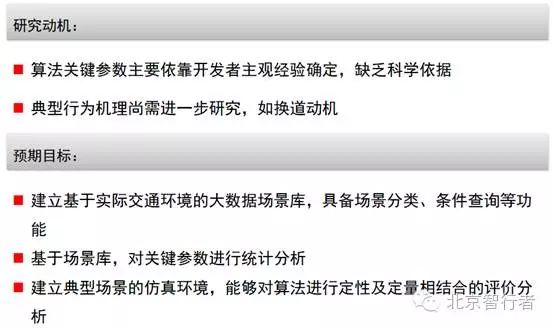
駕駛場景大數據采集基于車輛、傳感器等硬件平臺,通過對實際交通環境數據進行采集并后處理,來分析潛在的駕駛行為,并用于進行ADAS及自動駕駛算法優化和評估。通過數據采集和分析,建立基于實際交通環境的場景庫。基于該場景庫,我們不僅希望在具體功能開發過程中提出統計意義上的指導,避免關鍵參數主觀臆斷;同時希望建立仿真模型庫,并提供用戶自動駕駛算法接口,將算法結果同實際數據進行定量分析,繼而提出改進意見。
最后用下面圖片來總結駕駛場景大數據研究動機及預期目標。
2、研究思路
下圖是系統整體研究思路,首先通過數據采集及后處理構建場景庫;而后基于該場景庫對自動駕駛關鍵參數進行統計分析,并用于指導功能開發;最后依托于場景庫構建虛擬仿真平臺,并利用此平臺對自動控制算法效果同實際駕駛數據進行對比,從而評價算法性能。以下分別對三個部分進行介紹:
數據采集及后處理
數據采集主要涉及傳感器、道路及駕駛員等因素,以戴姆勒合作項目為案例進行分析。在該項目中,車輛平臺選用奔馳S級轎車,并開放相關底層CAN協議;采用Velodyne 64線激光為主要數據采集設備,同時車頂布置四臺相機進行圖像采集;此外車輛配置一臺雙目進行駕駛員面部表情檢測,數據采集處理器和存儲采用工控機進行。
駕駛員選擇相對嚴格,首先是對收入和職業有一定要求,即要具有潛在購買奔馳車的能力,其次是需要參考現有奔馳車主的一個大概年齡和性別分布來進行確定。一句話,駕駛選擇同項目研究目的緊密結合,不是隨便找兩個司機就OK,從這一點上可以看出德企項目研究相當嚴謹和有針對性。
在采集道路選擇上同樣也盡可能的全面。如下圖所示,確定了單程60多公里的采集路線:包括高速、環路及城市復雜道路等多種交通場景,同時還要在交通高峰期和非高峰期分別采集;此外必須風雨無阻,越是下雨下雪越好:記得數據采集是差不多已經是冬天了,突然有一天下雪,我還以為可以休息一天,哪知戴姆勒項目的中國同事卻異常興奮,說終于有特殊天氣了,今天要多記點數據,其認真精神真是令人汗顏。
下圖是戴姆勒項目總結的從三個維度上去考察駕駛行為:駕駛員、車輛及道路交通情況。是不是有種似曾相識的感覺呢,在上文中我們提到,自動駕駛研究必須考慮“人-車-路”相互關系及影響,而非將三者孤立看待,這同基于這三個維度的駕駛行為分析有很大相似之處。在下文中將重點分析各個維度對駕駛行為的影響及采用的基本分析方法。
回顧一下,這一部分主要介紹了用于駕駛行為研究的場景大數據采集與分析,重點分析了駕駛行為基本概念、研究動機及意義,并就數據采集及應用思路進行了介紹。
在下一部分中將就其中核心內容:數據后處理及場景庫建立、統計分析指導及虛擬場景建模進行逐一分析。
1、數據采集與后處理
上文已對數據采集平臺、傳感器、交通環境及駕駛員等進行了介紹,在戴姆勒平臺上,一天的原始數據采集量約為1T左右,50天就有近50T的數據了。如此“海量”的數據中如何提取有用的信息呢?如果將數據分析過程視為淘金的話,首先需要進行洗礦,即通過數據后處理來初步處理原始數據。
數據后處理的主要目的如下:
典型場景標記:對于典型駕駛場景(如跟車、換道等),國內外數據分析通常采用人工標記手段進行,理論上雖然可以基于傳感器數據進行自動分析,但考慮到現實場景的復雜性及處理精度,建議采用人工標記方法;
參數自動計算:在場景標記基礎上,基于傳感器數據對感興趣目標進行分析,如跟車場景中前車距離、相對速度、THW及TTC等關鍵參數;
場景數據庫:對于各種場景庫及其對應參數,需要開發數據庫系統進行管理,系統應具備局部條件查詢、導入導出等基本功能。
針對以上三個目的,我們開發了如下圖所示的三個軟件進行處理:TSLS,TDPPS及TDMS,以下對前兩項進行介紹。
1.1 TSLS功能介紹
TSLS主要用于場景人工標記,標記內容如下圖所示,主要包括:場景類型、起止時間、對應交通及駕駛員信息。這其中關鍵點為場景如何分類,當前場景分為6個大類,78個小類,分類依據主要基于學術研究、國際相關項目及中國實際交通道路情況。
下圖為橫向駕駛行為標記示例,橫向行為當前分為三種具體場景:鄰車切入、成功換道及換道失敗。每一種場景里面又分為若干小類,如成功換道又包括換至鄰車道、跨越兩車道換、換至逆向車道、逆向車道換至原車道等,同樣另外兩種場景也包括若干小類。同時在標記過程中除了選擇所屬小類外,還需要具體標記場景信息,以提高參數計算精度,如需要標記周圍車輛位置、車輛類型等多種屬性。
在場景標記中,另一重要內容是場景起止時間標記,這涉及到各個場景的定義,具體不再贅述。
1.2 TDPPS功能介紹
TDPPS的主要功能是在場景標記基礎上對其中典型參數進行計算,主要包括如下的四個步驟:數據同步、傳感器融合、目標檢測及數據庫寫入操作。顯然,這其中關鍵步驟當然是目標檢測,在戴姆勒項目中,主要采用64線激光雷達進行車輛目標識別及參數計算。
在該研究中,基于64線激光的車輛識別最遠距離做到70米左右,最主要參數包括車輛距離及相對速度,參數精度評估方法為:在數據采集車及測試車輛上安裝同基站差分GPS系統,以64線激光計算的目標距離和速度同差分系統推導的兩車距離及速度進行對標,從而評估參數計算精度,通過多組實驗驗證距離和相對速度兩項參數的精度均在95%以上。下面視頻為車輛目標識別過程,其中左側綠色矩形框為識別出車輛的OBB(定向包圍體),右側曲線為距離及相對速度參數曲線。
2、基于統計方法的參數指導
在ADAS或自動駕駛開發過程中,經常會涉及到一些關鍵參數難以確定的情況,例如:量產ACC系統通常分為三個檔,用于表示激進、中等及保守三種跟車類型,用戶可根據自己駕駛風格及實際體驗來選擇不同檔位。那么這三個檔位參數閾值該如何確定呢?相信這些參數及其確定方法都是各家公司的核心技術機密,但通過戴姆勒合作項目我們逐漸認識到,德國同行顯然更認同通過大數據采集方式來進行典型參數分析的“笨”方法,而不是僅憑開發者或領導意志來走捷徑。
由于項目合作要求,無法向大家公布具體參數類型及統計值,只能簡單舉例說明研究思路。下圖為參數分析截圖,主要采用方法有正態分析、相關性分析及T檢驗等,分析目標參數分布、同道路、駕駛員顯著性分析及其它。
下圖即為不同道路條件下跟車行為的THW分布,通過分布值將得到實際道路上應該如何設置參數閾值,以及不同道路條件下是否需要改變閾值分布(通過不同道路的顯著性差別進行判斷)。
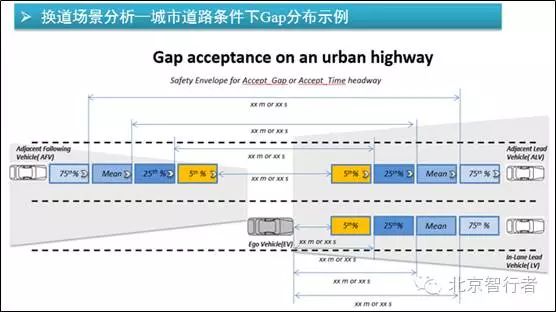
下圖為換道場景下自車道前車、鄰車道前后車輛的距離及相對速度分布關系,這張圖在自動駕駛換道行為判斷上尤其有用。在上一期說到,換道過程包括動機產生、可行性分析及換道執行三部分。那么基于這些數據可以大致反映中國駕駛員的換道動機(尤其是速度動機方面),同時鄰車道前后車輛行駛狀態也可用于分析換道是否可行,注意:此處換道可行性并非表示運動學上是否具有碰撞風險,而是實際條件下駕駛員換道習慣,只有按這些所謂的習慣進行自動駕駛開發,才能使得車輛真正融入到正常交通流中,而不至于顯得生疏和孤僻。
3、基于仿真場景的算法改進
車輛研究方向商用仿真軟件很多,且各有特點:如Carsim強項是車輛動力學仿真,其傳感器模型功能較弱;Prescan在ADAS研究方面優勢巨大,其接近真實的道路場景模型、豐富的傳感器模型能夠極大節省功能仿真時間。但無論何種仿真工具,目前都僅是一種低級“工具”,即使其道路、傳感器及車輛動力學模型再真實,也難以對實際交通行為進行仿真,只能在一些預設簡單場景下進行測試。
本研究思路如下圖,將場景庫中測試場景導入仿真軟件中,導入元素包括道路結構、感興趣目標運動參數等;在虛擬場景下,將自動駕駛算法放入其中進行測試,并同場景庫中真實駕駛參數進行對比;將對比參數曲線輸出,從而可以得出算法評估報告,并以場景庫中參數作為標準對自動駕駛算法進行迭代改進。注意,此思路是立足于所謂“優秀駕駛員“的假設基礎上進行的,即假設進行數據采集的駕駛員駕駛行為是算法學習的對象。
下面兩個視頻是上述思路的一個展示。第一個視頻是原始交通數據,其中智能車輛正在穩態跟車行駛;第二個視頻是其虛擬仿真場景,其中前車和左車道鄰車是按真實場景中車輛運動參數進行模擬行駛,智能車運動是由算法輸入進行控制,此視頻中尚未展示跟車對比曲線,但在實際研究過程中,正是通過關鍵參數的曲線對比來調節自動駕駛算法參數,盡量使其同實際駕駛行為無限逼近。
以上就是這一期的全部內容,簡單回顧:在數據采集基礎上,首先進行數據后處理來建立典型駕駛行為場景庫;其次,通過場景庫數據統計分析,來得出關鍵參數的實際分布情況,并用其指導實際算法開發;最后,將場景庫中場景還原至仿真環境中,從而進行實際駕駛數據同自動控制算法的對比,從而進一步改進算法,提高算法在實際交通環境中的適應性。
駕駛行為研究是決策算法的靈魂所在,也是當前復雜環境下自動駕駛研究面臨的最大挑戰,可以毫不夸張的說它的成敗直接決定了自動駕駛水平到底是屬于“新司機”水平還是“老司機”水平;但當前對駕駛行為機理研究尚不充分,本文所述方法也只是摸著石頭過河,還需要更多研究者共同參與研究!
-
adas
+關注
關注
309文章
2193瀏覽量
208860 -
自動駕駛
+關注
關注
785文章
13932瀏覽量
167012
原文標題:如何進行自動駕駛算法開發?
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論