 小米米家掃地機器人拆解 做工如何
小米米家掃地機器人拆解 做工如何
8月底,小米在北京召開發布會,正式發布了生態鏈品牌米家旗下的新品:米家掃地機器人,售價1699元。
米家掃地機器人采用了十分簡潔的外觀設計,尤其是透明灰塵蓋可以一目了然地看到內部情況。
同時,機身外殼還配備雷了達罩、出音孔、出風孔和充電連接點,適合各種居家環境。
接下來我們就拆開這臺機器人,看看它的內部構造。
米家掃地機器人9.6cm厚度、純白機身、模塊化設計、全密封塵盒、人性化防毛發設計,IMR工藝的上蓋,更具質感透亮。
機器人上蓋開啟狀態。
每個功能按鍵都有完善的中文注解,非常體貼。
塵盒具備塵盒檢測傳感器,機器人開機后取出和歸位塵盒的時候都有語音提示。
塵盒進口是梯形出口是矩形,出口的E11等級濾網可以阻隔非常細小的灰塵顆粒。
塵盒開啟狀態。
濾網可以取出方便更換,E11等級濾網特寫。
機器人底部,采用的是單側邊刷。
按箭頭方向按動卡扣可取下主刷上蓋。
V字型膠毛一體化主刷。
萬向輪與兩個懸崖傳感器,萬向輪同樣具有毛發防纏繞功能。
懸崖傳感器,機器人底部一共有4個懸崖傳感器。可有效杜絕機器人跌落損壞。
左右兩只輪子,每個輪子都是獨立電機驅動并且安裝有里程計,用來計算工作室的行走里程。
輪子采用浮動式設計。
LDS激光測距傳感器,會以5x360。/秒的速度掃描房間,獲取距離信息。當激光投射到障礙物上時,會反射在圖像傳感器上。同時,圖像傳感器會根據光斑的像素序號來計算到激光測距傳感器的中心距離。
此外激光測距傳感器通過掃描并定位充電座,識別它在地圖上的位置。當房間全部清掃完成,會自動規劃最短路線返回充電座充電。
在清掃途中,如果電量低于20%,能自動返回充電座充電,當電量充至80%后機器人還會回到上次未清掃完成地點繼續清掃,免去重復清掃的尷尬。
超聲傳感器,整顆傳感器由負責發射超聲和負責接收超聲兩部分組成,聲波在空氣中傳播的速度是340M/s,根據發射和接收的時間差可以計算并得到機器人與障礙物距離,從而避免碰撞,透明物體(例如玻璃)也能正確感應提前減速。
機身上的充電觸點。
位于機器人側面的沿墻傳感器。
機器人的邊刷,仔細看中央半球形底部邊緣的黑色小刷頭為邊刷防纏繞結構,又稱“毛發隔離束”,它可以隨邊刷進行同步轉動,一方面防止毛發進入間隙,另一方面便于收集毛發。
機器人尾部一個非常隱蔽的部位預留了一個MicroUSB接口,功能未知。
機器人底部相關信息貼紙。
擰開6枚螺絲(其中一枚螺絲上有防拆易碎貼紙),移除機器人底蓋。
底蓋上的螺絲是防脫落設計,很貼心。
LG/松下原裝進口高能量密度18650鋰離子電芯,容量為5200mAh,標準模式下單次最大續航時間約2.5小時最大清掃面積約250平米。
具有獨立電機驅動的左右兩只輪子,輪子總成一體化模塊設計,擰下螺絲輕輕一拔即可將輪子總成完整取出。
左右兩只輪子與喇叭吸塵口。喇叭吸塵口采用了柔性吸塵軟管系統,它與塵盒的連接處采用FIP密封方式,浮動靈活密封嚴密。
移除幾個模塊機器人還有一層蓋板,這一層蓋板螺絲非常多,但好在只有兩種規格的螺絲而且不易混淆。
經過漫長的擰螺絲,終于去下蓋板,露出機器人的核心電路板。
電路板上密密麻麻布滿了大大小小各種IC元件,復雜度異常!
另一側是風機和各個模塊部分連接插座。
各個模塊部分連接插座。
充電觸點這里沒什么機關,就是簡單的正負極連接線。
沿墻傳感器與懸崖傳感器。
碰撞傳感器的出發開關。
超聲雷達傳感器,整顆傳感器由負責發射超聲和負責接收超聲兩部分組成。
拆掉螺絲和排線取下電機。
米家掃地機器人采用日本原裝進口NIDEC無刷電機,能達到最大風量0.67m3/min,最大風壓約為1800Pa。
出風口使用防塵過濾棉。
風機出風口采用軟橡膠材質。
NIDEC無刷電機LOGO。
常見的渦輪風扇。
眾多的排線,大部分連接的都是各種傳感器。
機器人的揚聲器部分。
接下來拆除LDS激光測距傳感器。
LDS激光測距傳感器由一個電機通過皮帶驅動。通過快速旋轉以5?60?/秒的速度掃描房間,獲取距離信息。
拆開LDS激光測距傳感器。里面有主控電路、激光發射管與接收傳感器組成。
TI德州儀器TMS320F28026DAS微控制器(MCU)。
在激光測距模塊下方還有一個光電傳感器,孔里看到的是發射端。
接收端在底部的PCB上。
LDS激光測距傳感器電路板反正面。
供電電路部分。
超聲雷達傳感器。
超聲雷達傳感器的電路部分。
PCB上方的是東芝TC74HC4049A反相緩沖器。
SGM722970μA 10MHz Rail-to-RailI/OC MOS Operational Amplifier運算放大器,TI德州儀器HC0263A。
來自夏普的沿墻傳感器。
碰撞傳感器與懸崖傳感器。
懸崖傳感器由一個紅外發射管和紅外接收管組成。
拆開的碰撞傳感器,原理很簡單通過杠桿原理導通和關閉光信號來識別是否撞擊到障礙物。
電路板的背面和正面相比空曠許多。
Allwinner ARM Cortex-A7架構的四核應用處理器。
黃框美光MT41K256M16TW-107 DDR3LSDRAM,橙框AXP223電源系統管理芯片,紅框東芝THGBMDG5D1LBAIL 4GB se-MMC,綠框RTL8189ETV無線模塊。
ST意法半導體ARM Cortex-M3架構的微控制器。
TI德州儀器BQ24773充電管理IC。
SGM8594精密運算放大器。
SGM8748 155ns Low-Power 3V/5V Rail-to-Rail Input Single-Supply Comparator。
RT2515H2A Low Input Voltage Ultra-Low Dropout LDO Regulator with Enable線性穩壓IC。
SGM48780D4Ω High Speed Low Voltage 4:1 Multiplexer。
紅框SGM8594精密運算放大器,橙框SGM8622250μA 3MHz Rail-to-RailI/O CMOS Operational Amplifier運算放大器。
開關微動按鍵與其藍白雙色LED背景燈。
拆開電池組外殼,電池保護板鎳帶的焊接元件焊點與排線焊點的處理都非常到位,保護板具有:過充保護、過放保護、溫度保護、短路保護、過流保護、二次過壓。
從縫隙可以看出來我手中這款采用的是LG的18650鋰離子電池。
米家的設備確實為生活增添了智能和方便快捷元素。
全家福。
-
小米
+關注
關注
70文章
14387瀏覽量
144936 -
掃地機器人
+關注
關注
21文章
792瀏覽量
53640
發布評論請先 登錄
相關推薦
智能掃地機器人的工作原理和構成
霍爾元件在掃地機器人中的應用
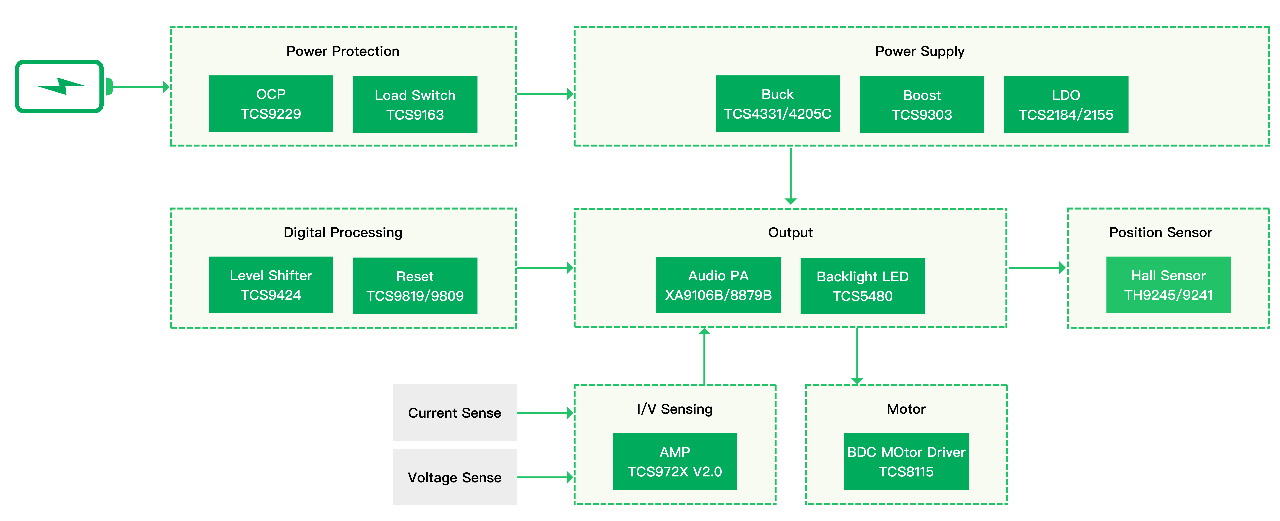
掃地機器人應用解決方案
霍爾開關在掃地機器人中的應用
掃地機器人的技術和芯片方案,有哪些創新?
掃地機器人的核心技術突破
掃地機器人避障技術的發展史
湯誠科技推出掃地機器人、洗地機應用方案,?為品質生活添彩
供應 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
掃地機器人高溫高濕試驗標準詳解及試驗方法

光耦知識分享‖探討光耦技術在掃地機器人的應用

其利天下技術·搭載無刷電機的掃地機器人的前景如何?
歡創播報 | 石頭掃地機器人獲Matter認證

掃地機器人CCC認證申請流程與其他產品的區別是什么?






 工商網監
工商網監
評論