 自動駕駛前端軟件DreamView的使用介紹
自動駕駛前端軟件DreamView的使用介紹
為保證自動駕駛車輛能為電腦提供及時、準確、可靠的決策控制依據,實現或輔助實現車輛的駕駛操作,需由傳感器為感知系統負責采集車輛自身狀態信息、周圍環境信息等數據。
并傳輸至Monitor模塊,及時監測硬件及系統的健康狀況。當出現問題時,系統及駕駛員即可中止駕駛過程。
對于駕駛中的信息,用戶可以通過Web應用程序「DreamView」來查看、掌握自動駕駛系統的輸出數據。
「DreamView」的輸出數據,包括車道、位置、車身等情況。TA提供如下的功能:
「可視化顯示」當前自動駕駛車輛模塊的輸出信息。例如規劃路徑、車輛定位、車架信息等。
為使用者提供「人機交互接口」以監測車輛硬件狀態。對模塊進行開關操作,啟動自動駕駛車輛等。
提供「調試工具」。例如PnC監視器可以高效的跟蹤模塊輸出的問題。

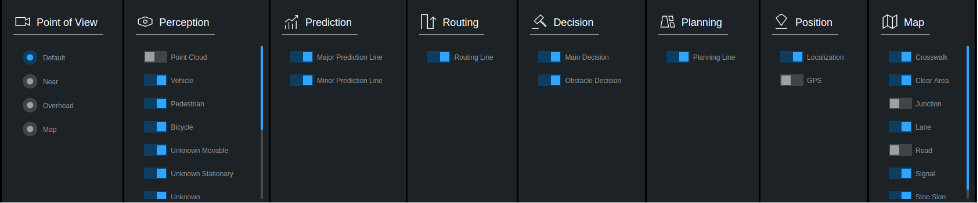
該應用程序的界面被劃分為多個區域:標題、側邊欄、主視圖和工具視圖。

標題包含4個下拉列表,可以像下述圖片所示進行操作:
附注:導航模塊是在Apollo 2.5版本引入的「滿足低成本測試」的特性。
在該模式下,Baidu或Google地圖展現的是車輛的絕對位置,而主視圖中展現的是車輛的相對位置。


側邊欄控制著顯示在工具視圖中的模塊。
Tasks
在DreamView中使用者可以操作的Tasks有:

「Quick Start」:當前選擇的模式支持的指令。通常情況下,
Setup:開啟所有模塊
Reset all:關閉所有模塊
Start auto:開始車輛的自動駕駛
「Others」:工具經常使用的開關和按鈕;
「Module Delay」:從模塊中輸出的兩次事件的時間延遲;
「Console」:從Apollo平臺輸出的監視器信息;
「Module Controller」:監視硬件狀態和對模塊進行開關操作 。

Layer Menu
顯式控制各個元素「是否顯示」的開關。
在向Routing模塊發送尋路信息請求前可以「編輯路徑信息」的可視化工具。
Data Recorder
將問題報告給Rosbag中的Drive Event的界面

Default Routing
預先定義的路徑或者路徑點,該路徑點稱為興趣點(POI)。

如果「打開」路徑編輯模式,路徑點可被顯式的在地圖上添加。
如果「關閉」路徑編輯模式,點擊一個期望的POI會向服務器發送一次尋路請求。
如果「只選擇一個點」,則尋路請求的起點是自動駕駛車輛的當前點。
否則尋路請求的起點是選擇路徑點中的第一個點。
查看Map目錄下的default_end_way_point.txt文件可以編譯POI信息。
例如,如果選擇的地圖模式為“Demo”,則在modules/map/data/demo目錄下可以查看對應的default_end_way_point.txt文件。

主視圖在Web頁面中以動畫的方式展示3D計算機圖形。
下表列舉了主視圖中各個元素:
| Visual Element | Depiction Explanation |
| 自動駕駛車輛 | |
|
車輪轉動的比率 左右轉向燈的狀態 |
|
 |
交通信號燈狀態 |
 |
駕駛狀態(AUTO/DISENGAGED/MANUAL等) |

|
行駛速度 km/h 加速速率/剎車速率 |
|

| 紅色粗線條表示建議的尋路路徑 | |
 |
輕微移動物體決策-橙色表示應該避開的區域 |
 |
綠色的粗曲線條帶表示規劃的軌跡 |
障礙物
| Visual Element | Depiction Explanation |
 |
車輛障礙物 |
 |
行人障礙物 |
 |
自行車障礙物 |
 |
未知障礙物 |
 |
速度方向顯示了移動物體的方向,長度隨速度按照比率變化 |
 |
白色箭頭顯示了障礙物的移動方向 |
 |
黃色文字表示: 障礙物的跟蹤ID 自動駕駛車輛和障礙物的距離及障礙物速度 |
 |
線條顯示了障礙物的預測移動軌跡,線條標記為和障礙物同一個顏色 |

決策柵欄區
決策柵欄區顯示了Planning模塊對車輛障礙物做出的決策。
每種類型的決策會表示為不同的顏色和圖標,如下圖所示:
| Visual Element | Depiction Explanation |

| 停止表示物體主要的停止原因 | |

| 停止表示物體的停止原因 | |

| 跟車物體 | |

| 讓行物體決策—點狀的線條連接了各個物體 | |

| 超車物體決策—點狀的線條連接了各個物體 |
線路變更是一個特殊的決策,因此不顯示決策柵欄區,而是將路線變更的圖標顯示在車輛上。
| Visual Element | Depiction Explanation |
 |
變更到左車道 |
 |
變更到右車道 |
在優先通行的規則下,當在交叉路口的停車標志處做出讓行決策時,被讓行的物體在頭頂會顯示讓行圖標。
| Visual Element | Depiction Explanation |
 |
停止標志處的讓行物體 |
停止原因
如果顯示了停止決策柵欄區,則停止原因展示在停止圖標的右側。
可能的停止原因和對應的圖標為:
| Visual Element | Depiction Explanation |
 |
前方道路側邊區域 |
 |
前方人行道 |
 |
到達目的地 |
 |
緊急停車 |
 |
自動駕駛模式未準備好 |
 |
障礙物阻塞道路 |
 |
前方行人穿越 |
| 黃/紅信號燈 | |
| 前方有車輛 | |
| 前方停止標志 | |
| 前方讓行標志 |
可以在主視圖中展示多種從「Layer Menu」選擇的視圖模式:
| Visual Element | Depiction Explanation |
| 默認視圖 | |
| 近距離視圖 | |
| 俯瞰視圖 | |
|
地圖: 放大/縮小:滾動鼠標滾輪或使用兩根手指滑動; 移動:按下右鍵并拖拽或或使用三根手指滑動。 |
-
傳感器
+關注
關注
2553文章
51407瀏覽量
756627 -
人機交互
+關注
關注
12文章
1217瀏覽量
55533 -
自動駕駛
+關注
關注
785文章
13932瀏覽量
167013
原文標題:技術文檔 | DreamView用法介紹
文章出處:【微信號:Apollo_Developers,微信公眾號:Apollo開發者社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
FPGA在自動駕駛領域有哪些應用?
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
自動駕駛真的會來嗎?
細說關于自動駕駛那些事兒
自動駕駛的到來
AI/自動駕駛領域的巔峰會議—國際AI自動駕駛高峰論壇
如何讓自動駕駛更加安全?
自動駕駛汽車的處理能力怎么樣?
聯網安全接受度成自動駕駛的關鍵
如何保證自動駕駛的安全?
自動駕駛系統設計及應用的相關資料分享
自動駕駛技術的實現
自動駕駛線控底盤VCU功能介紹
自動駕駛算法軟件架構介紹






 工商網監
工商網監
評論