") F-OP300傾斜模塊上線——支持免像控傾斜模式
F-OP300傾斜模塊上線——支持免像控傾斜模式
F-OP300傾斜模塊采用獨(dú)特的雙相機(jī)傾斜設(shè)計(jì)方案,結(jié)合無人機(jī)管家智能航線設(shè)計(jì),具備高質(zhì)量的側(cè)面紋理采集及高效率的作業(yè)能力;其具備的逐相機(jī)打標(biāo)和同步曝光能力,可有效的解決相機(jī)快門延時誤差,獲取每個相機(jī)的準(zhǔn)確曝光位置信息;配合無人機(jī)管家數(shù)據(jù)處理模塊,可支持“高精度免像控傾斜攝影”作業(yè)模式,為1:500免像控三維測圖提供完整的軟、硬件解決方案,支持F200、F300機(jī)型使用。
一、載荷參數(shù)
載荷名稱:F-OP300
相機(jī)型號:SONY A6000
傳感器尺寸:23.4*15.6mm
有效像素:4800萬(6000*4000*2)
鏡頭參數(shù):35mm定焦
采集分辨率:優(yōu)于2cm
二、方案特點(diǎn)
(1)定制化鏡頭
F-OP300傾斜模塊相機(jī)鏡頭采用索尼定制35mm定焦鏡頭,鏡頭為缺省無窮遠(yuǎn)對焦模式,減少相機(jī)設(shè)置難度,有效的提高了對焦穩(wěn)定性及影像采集質(zhì)量。
(2)往返航線設(shè)計(jì)
無人機(jī)管家中智航線中支持全自動的傾斜航線生成;規(guī)劃或?qū)雲(yún)^(qū)塊只需填寫所需分辨率及重疊度即可自動生成航線,具備自動劃分架次等功能。
航線設(shè)計(jì)圖
F-OP300傾斜航線默認(rèn)為往返航線設(shè)計(jì),搭配獨(dú)特的雙相機(jī)角度設(shè)計(jì),單架次航線即可獲取覆蓋區(qū)域4方向側(cè)面紋理;同時,針對紋理要求不高的任務(wù),選擇非往返設(shè)計(jì)即可建模,可以提高一倍的數(shù)據(jù)獲取能力。
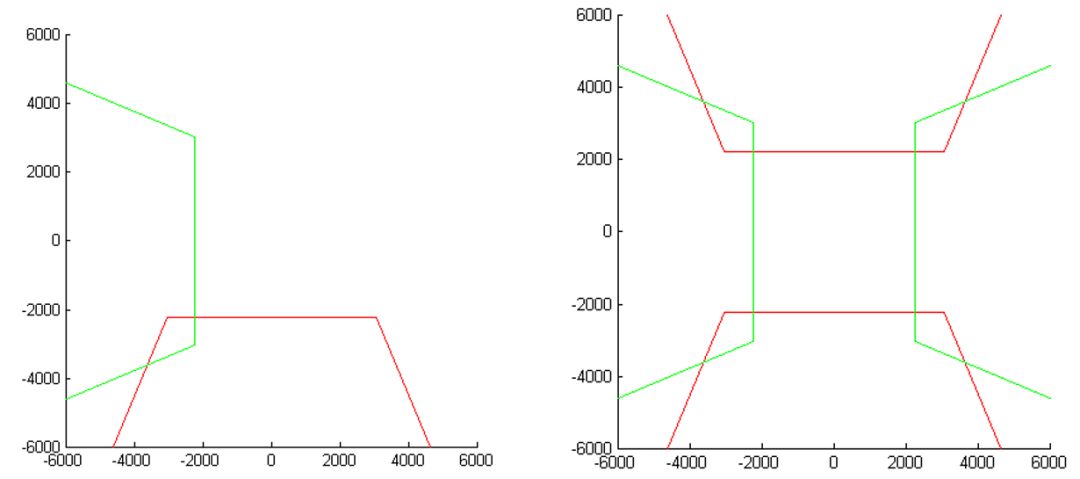
雙相機(jī)往返設(shè)計(jì)示意圖
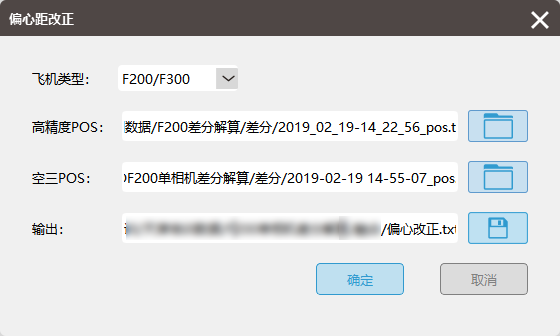
(3)偏心距改正
F200、F300機(jī)型可精確獲取GPS天線和相機(jī)之間的安置參數(shù),經(jīng)偏心改正處理后,可獲取每個相機(jī)的精確曝光位置,為免像控高精度作業(yè)提供保障。
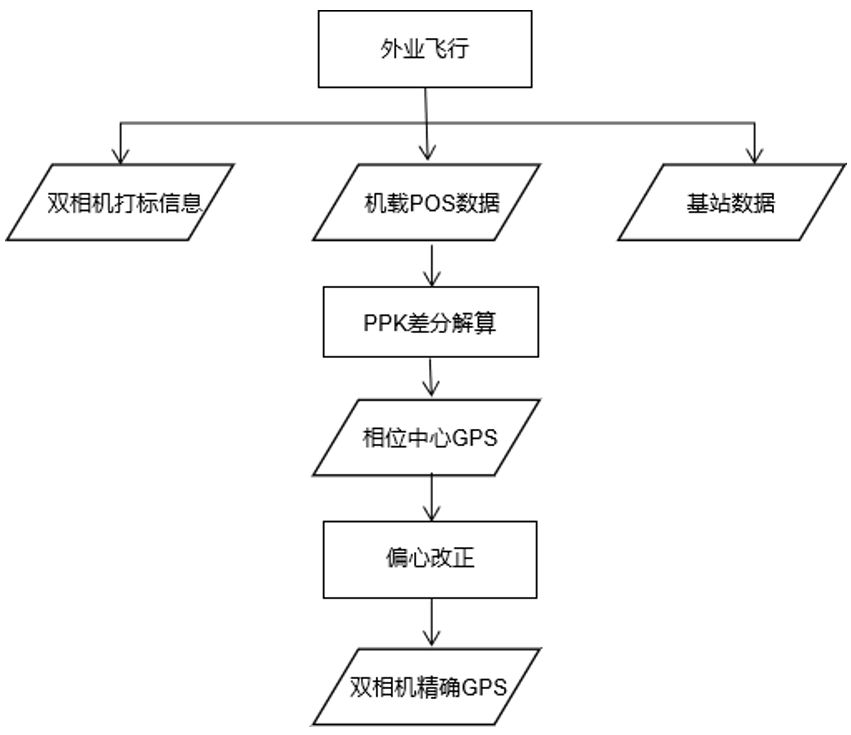
偏心改正處理流程
(4)作業(yè)效率
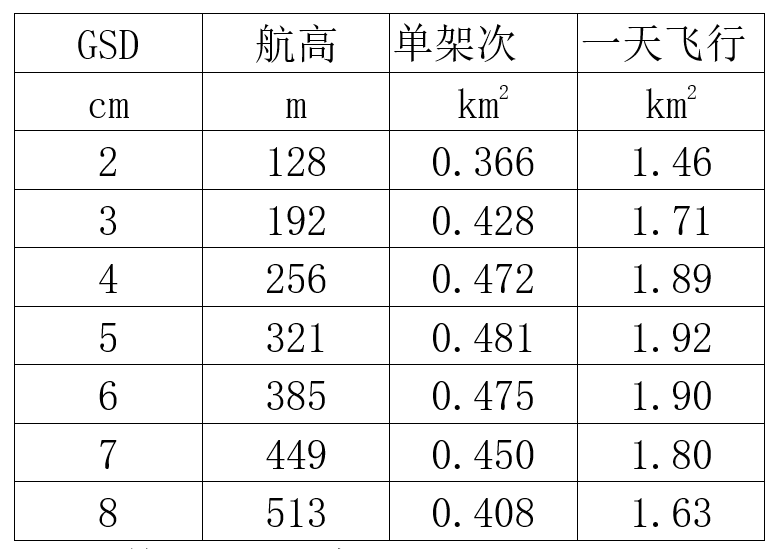
注:按照1天飛行4架次,單架次60km航程限制,80%×65%重疊度、往返航線統(tǒng)計(jì)。
三、1:500免像控傾斜應(yīng)用案例
(1)測區(qū)概況
為驗(yàn)證F200搭載F-OP300傾斜模塊免像控能力,2019年2月19日在天津?qū)氎鏅z校場獲取一組數(shù)據(jù),飛行高度195cm,地面分辨率為2.5cm,航向重疊率80%,旁向重疊率65%,此次飛行共獲取0.7km2數(shù)據(jù)。
航線設(shè)計(jì)
(2)外場作業(yè)流程
在空曠處架設(shè)飛馬標(biāo)配基站,連接千尋CORS采集基站點(diǎn)坐標(biāo)并記錄靜態(tài)數(shù)據(jù)。F200采用手拋式起飛,按照預(yù)定航線進(jìn)行數(shù)據(jù)獲取。
手拋F200
(3)數(shù)據(jù)處理流程
此次飛行獲取數(shù)據(jù)包括影像數(shù)據(jù)、飛機(jī)GPS觀測數(shù)據(jù)和基站靜態(tài)數(shù)據(jù),利用無人機(jī)管家“智理圖”模塊進(jìn)行差分解算,獲得高精度天線相位中心GPS數(shù)據(jù)。
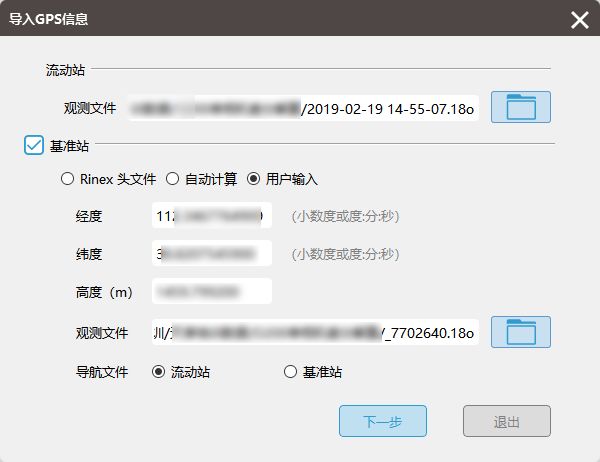
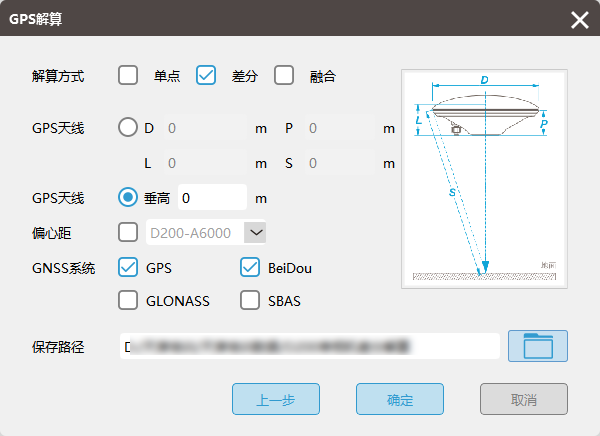
GPS差分解算
根據(jù)飛機(jī)安置角度、飛行姿態(tài)信息及打標(biāo)時間進(jìn)行偏心改正,獲得各個相機(jī)準(zhǔn)確曝光點(diǎn)位置,用于后期基于高精度GPS的空三平差處理。
在“智拼圖”模塊導(dǎo)入影像和偏心改正后GPS,采用空三+PPK進(jìn)行空三計(jì)算。
基于高精度GPS空三平差
空三結(jié)果
將無人機(jī)管家空三結(jié)果導(dǎo)入CC進(jìn)行刺點(diǎn),并將所有點(diǎn)都設(shè)為檢查點(diǎn),查看預(yù)測點(diǎn)位(綠色)與實(shí)際點(diǎn)位誤差,均在2-3個像素。
刺點(diǎn)完成可在CC進(jìn)行空三平差,檢查無控模式下的精度情況。由空三報(bào)告可知檢查點(diǎn)平面中誤差為2.6cm,高程中誤差為7.46cm。
預(yù)測點(diǎn)位誤差
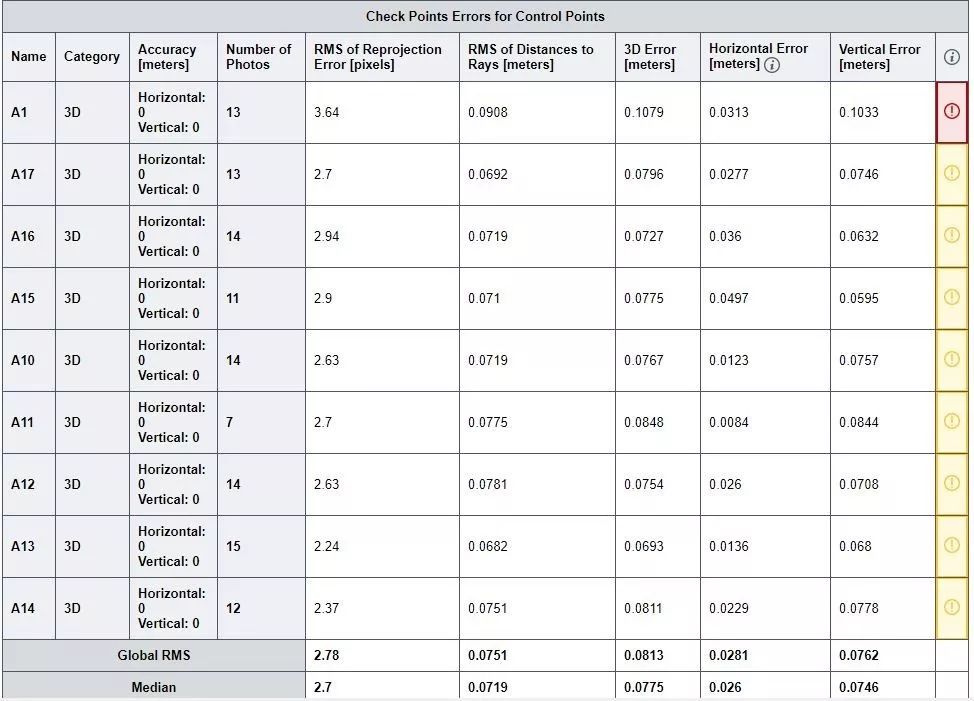
CC空三精度報(bào)告
(4)模型效果
基于無控空三成果進(jìn)行三維模型重建,模型效果如下:
模型整體圖
模型局部圖
模型細(xì)節(jié)圖
(5)三維成果精度
采用檢查點(diǎn)檢核三維模型精度,經(jīng)統(tǒng)計(jì),三維模型的檢查點(diǎn)平面中誤差為5.5cm,高程中誤差為7.7cm。
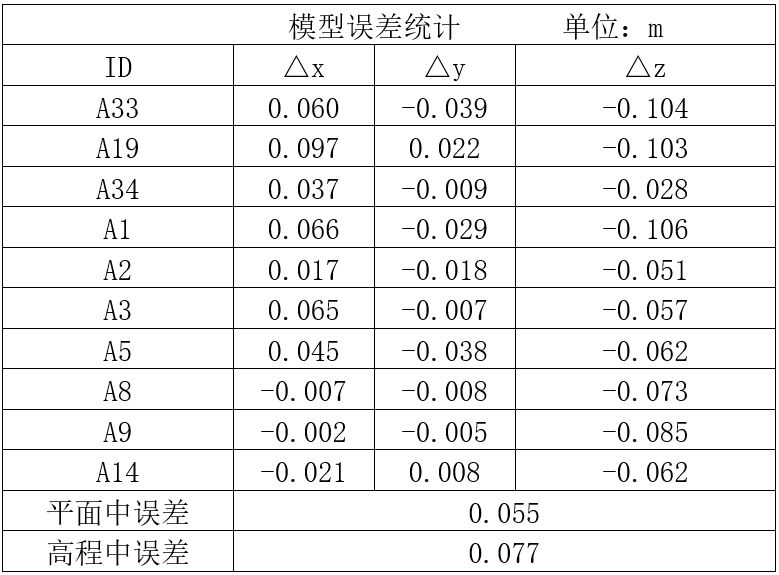
三維模型誤差報(bào)告
由此可知,F(xiàn)200搭載F-OP300傾斜模塊的三維測圖解決方案可以滿足航測1:500地形測圖精度要求。該方案可大大減少了外業(yè)布控工作量,提高作業(yè)效率,適用于大面積高精度三維建模等工程項(xiàng)目。
-
相機(jī)
+關(guān)注
關(guān)注
4文章
1367瀏覽量
53914 -
數(shù)據(jù)處理
+關(guān)注
關(guān)注
0文章
613瀏覽量
28629 -
無人機(jī)
+關(guān)注
關(guān)注
230文章
10515瀏覽量
182405
原文標(biāo)題:F-OP300傾斜模塊上線——支持免像控傾斜模式
文章出處:【微信號:feimarobotics2015,微信公眾號:飛馬機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
傾斜傳感器開關(guān)電路分析
高精度傾斜儀SST211
ADI公司高精度易使用的傾斜傳感器
新型傾斜傳感器研究
無人機(jī)傾斜攝影是什么
如何解決數(shù)據(jù)傾斜的問題?
簡述Hive 數(shù)據(jù)傾斜問題定位排查及解決
傾斜傳感器的種類與選擇技巧
電桿傾斜監(jiān)測裝置 桿塔傾斜監(jiān)測裝置 支持數(shù)據(jù)實(shí)時讀取 精確預(yù)警

輸電線路桿塔傾斜在線監(jiān)測裝置,桿塔傾斜預(yù)警大師
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論