") 西門子1500與KUKA工業(yè)機器人的Profinet通訊步驟
西門子1500與KUKA工業(yè)機器人的Profinet通訊步驟
前段時間項目接觸到需用西門子1515FCPU與庫卡進行Profinet通訊,庫卡的安全配置走的是Profisafe,并不是走的控制柜底部的X11插頭,下面我將該項目的配置步驟分享給大家:
一、 硬件:
1. 西門子1515FCPU;
2. 庫卡KRC4系統(tǒng)控制柜;
二、 軟件:
1.Workvisual4.0;
2.博圖V14SP1;
三、步驟:
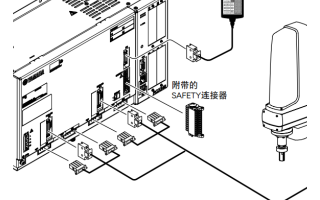
1.連接好機器人電纜并正常開機后,會發(fā)現(xiàn)示教器上方會顯示一條橫向提示框,如下界面黃框標示部分:
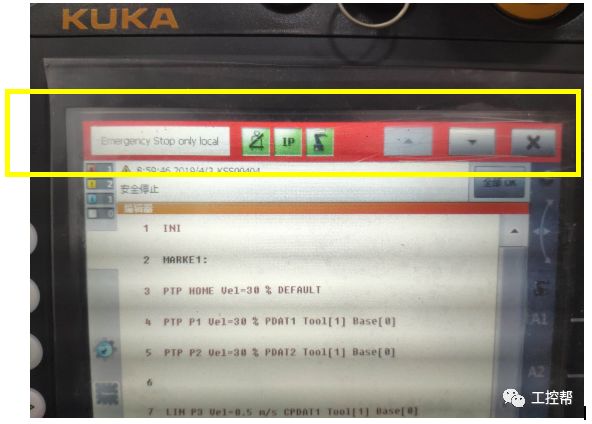
這時你需注意下機器人控制柜下側(cè)是否有標號為X11的插座,若無的話,說明該機器人的外部安全配置需通過網(wǎng)絡(luò)來配置。
2.機器人側(cè)的組態(tài):
打開WorkVisual4.0并在線下載KUKA備份,有時候若你不知道使用該軟件的哪種版本的話,你可以從機器人控制柜拷出來,一般機器人發(fā)貨時會把能用到的軟件都備份在機器人的控制柜內(nèi),這是你可以用U盤拷出來,具體方法不在這多說,今天主要講軟件配置問題;
(1).打開WorkVisual,點擊搜索,出現(xiàn)下圖所示:
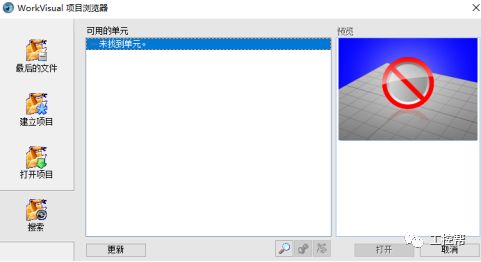
(2).可用的單元項若顯示未找到單元時,需對機器人和自己用的電腦IP進行設(shè)置,使兩者都處于同一網(wǎng)段,設(shè)置好后再次點擊搜索,就會出現(xiàn)下圖所示:
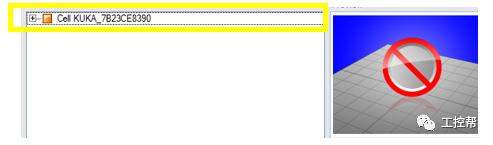
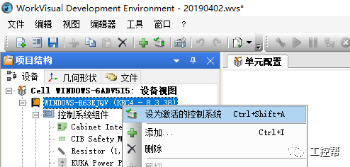
點擊“+”,出現(xiàn)子選項》》選中綠色箭頭標記一欄》》點擊打開;
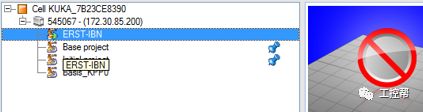
(3)右鍵下載完成的項目》》再點擊“設(shè)為激活的控制系統(tǒng)”;
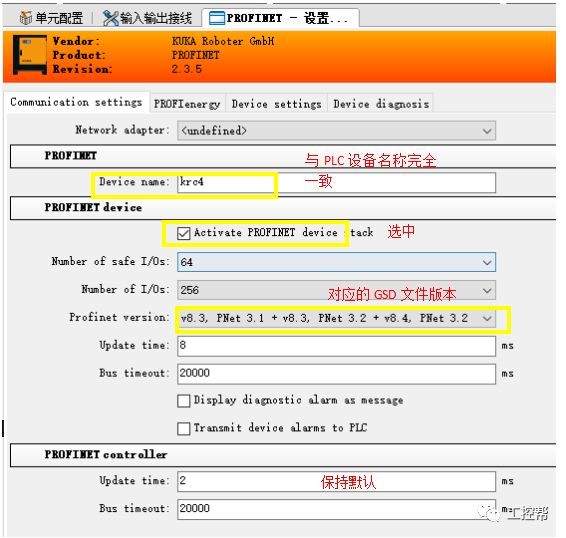
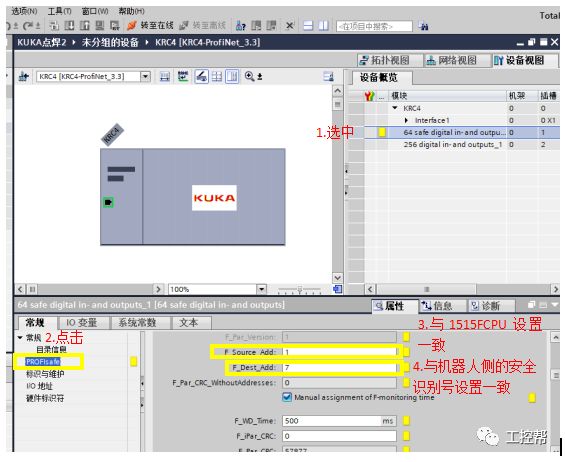
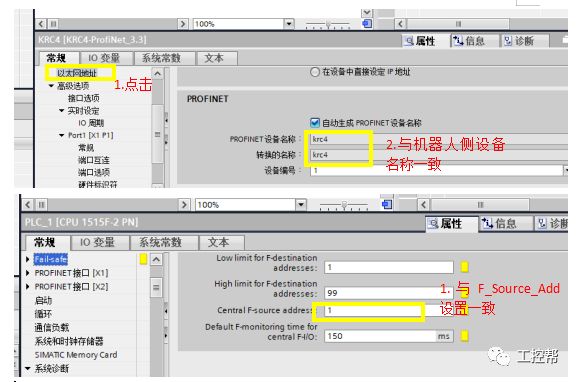
(4).右鍵點擊Profinet》》再點擊“設(shè)置”,出現(xiàn)下圖,黃色標記部分需特別注意,PLC組態(tài)時會用到,當兩邊都設(shè)置一致時通訊才會進行:
(3). 雙擊下圖中的設(shè)置》》選中“參數(shù)‘’》》設(shè)置 安全識別號;
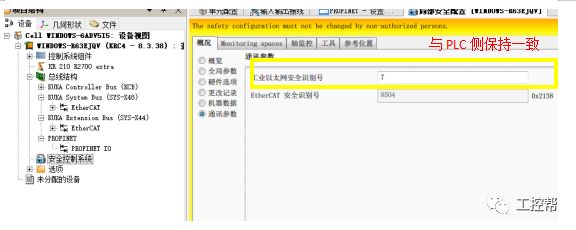
綜上,機器人側(cè)設(shè)置完畢,將修改后的配置傳到可控制柜即可。
3. PLC側(cè)的組態(tài):
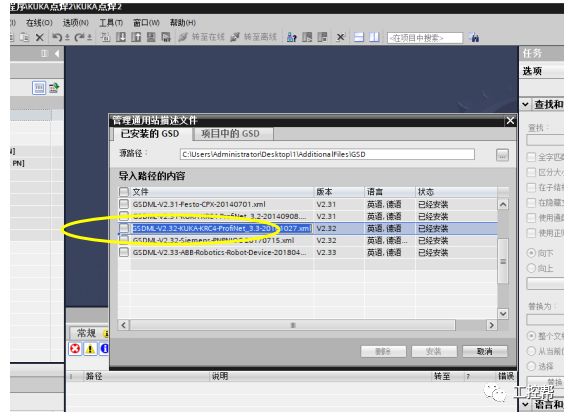
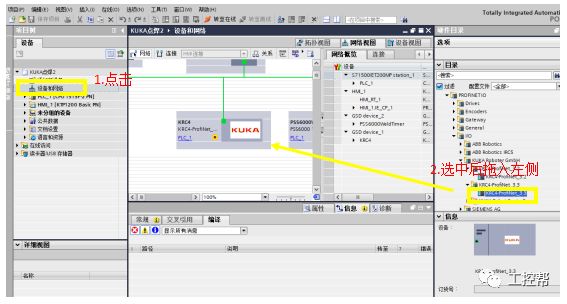
(1) GSD文件的導入:點擊選項》》管理通用站描述文件》》選擇與機器人側(cè)相同版本的GSD文件,進行安裝;
(2) 點擊“設(shè)備與網(wǎng)絡(luò)”》》將添加的GSD文件拖入設(shè)備與網(wǎng)絡(luò)框內(nèi);
(3)雙擊KUKA標識》》修改屬性;
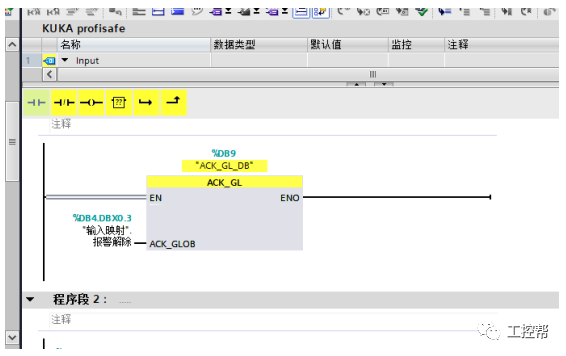
(4) 編程:根據(jù)自身的要求設(shè)置輸出,當在Safe功能塊進行編程時,注意添加去鈍化程序,當報警觸發(fā)時,解除報警需要激活去鈍化程序,這樣用到的安全(Safety)IO點才會刷新。
KUKA自帶的安全IO包括的信號名稱與對應(yīng)地址可在WorkVisual中查詢,查詢方法:
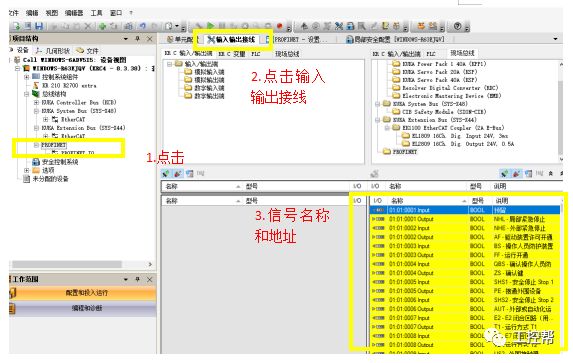
當通訊正常配置并導入后,示教器會出現(xiàn)下列報警,可以通過報警信息和上圖片中的IO信號名稱、地址作對應(yīng),進行激活;通常需要配置的信號為:002 Input NHE-外部緊急停止 (急停按鈕)
002 Input操作人員防護裝置(安全門、光柵)
005 Input安全停止1
006 Input安全停止2
010 Input安全運行停止
4.過程中遇到的問題及解決方法:
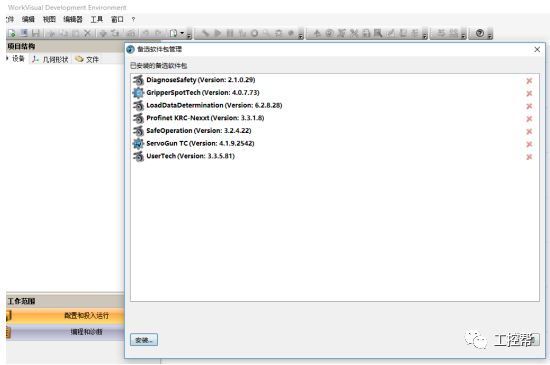
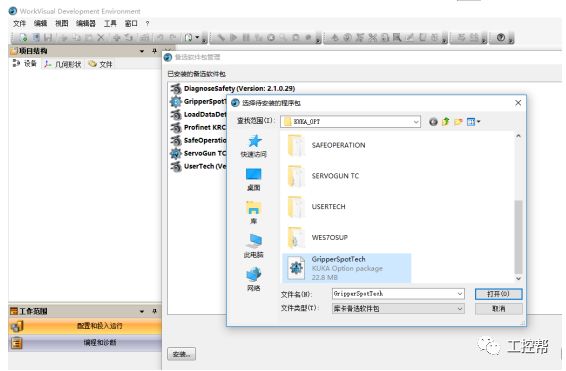
當把WorkVisual的備份重新傳入控制柜時,WorkVisual出現(xiàn)報警信息,見下圖:原因是機器人控制柜已安裝一些功能軟件,而電腦的WorkVisual并沒有添加這些功能,這是需要從控制內(nèi)用U盤將那些功能軟件安裝包拷出來,并安裝在WorkVisual上,安裝方法:在不打開任何程序的情況下點擊工具》》備選軟件包管理》》安裝》》選取拷貝的文件,之后再重新下載,解決問題。
-
西門子
+關(guān)注
關(guān)注
95文章
3062瀏覽量
116444 -
Profinet
+關(guān)注
關(guān)注
6文章
1217瀏覽量
23571 -
KUKA機器人
+關(guān)注
關(guān)注
4文章
143瀏覽量
9178
原文標題:西門子1500與KUKA工業(yè)機器人進行Profinet通訊步驟圖文版,超詳細!
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
雅馬哈機器人配置方法之西門子S7-1500控制技巧分享
EPR6-S工業(yè)機器人通過EtherCAT轉(zhuǎn)profinet網(wǎng)關(guān)接入西門子系統(tǒng)
西門子S7-1500系列PLC控制的6軸機器人系統(tǒng)解析
西門子Profinet連接EtheCAT伺服驅(qū)動器

西門子Profinet連接EtheCAT伺服驅(qū)動器
KUKA工業(yè)機器人與S7-1200PLC實現(xiàn)Profinet通訊的步驟

西門子1200PLC之間的ModbusTCP通訊如何實現(xiàn)?
EPR6-S工業(yè)機器人通過EtherCAT轉(zhuǎn)profinet網(wǎng)關(guān)接入西門子系統(tǒng)

實現(xiàn)ABplc機器人的EthernetIP轉(zhuǎn)西門子的profinet IO的應(yīng)用

Kuka機器人配置Profinet通訊網(wǎng)關(guān)HT3S-PNS-ECS

ABB機器人與西門子PLC的Profinet通訊設(shè)置
Profinet轉(zhuǎn)Profinet網(wǎng)關(guān)應(yīng)用在霍尼韋爾DCS與西門子1500PLC通訊案例






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論