 自動駕駛基礎 慣性測量單元
自動駕駛基礎 慣性測量單元
陀螺儀是用來測量角速率的器件,在加速度功能基礎上,可以進一步發展,構建陀螺儀。
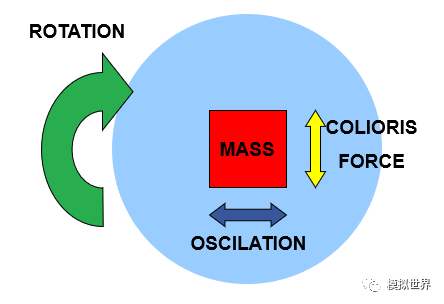
微機械陀螺儀(MEMS gyroscope)的工作原理和傳統的陀螺儀不一樣。傳統的陀螺儀主要是利用角動量守恒原理,因此它主要是一個不停轉動的物體,它的轉軸指向不隨承載它的支架的旋轉而變化。但是微機械陀螺儀的工作原理不是這樣的,因為要用微機械技術在硅片襯底上加工出一個可轉動的結構可不是一件容易的事。微機械陀螺儀利用科里奧利力——旋轉物體在有徑向運動時所受到的切向力。微機械(MEMS)陀螺儀的內部原理是這樣的:對固定指施加電壓,并交替改變電壓,讓一個質量塊做振蕩式來回運動,當旋轉時,會產生科里奧利加速度,此時就可以對其進行測量;這有點類似于加速度計,解碼方法大致相同,都會用到放大器。
絕大多數微機械陀螺儀依賴于由相互正交的振動和轉動引起的交變科里奧利力。振動物體被柔軟的彈性結構懸掛在基底之上。整體動力學系統是二維彈性阻尼系統,在這個系統中振動和轉動誘導的科里奧利力把正比于角速度的能量轉移到傳感模式。通過改進設計和靜電調試使得驅動和傳感的共振頻率一致,以實現最大可能的能量轉移,從而獲得最大靈敏度。大多數微機械陀螺儀驅動和傳感模式完全匹配或接近匹配,它對系統的振動參數變化極其敏感。
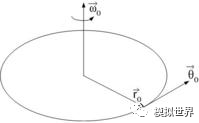
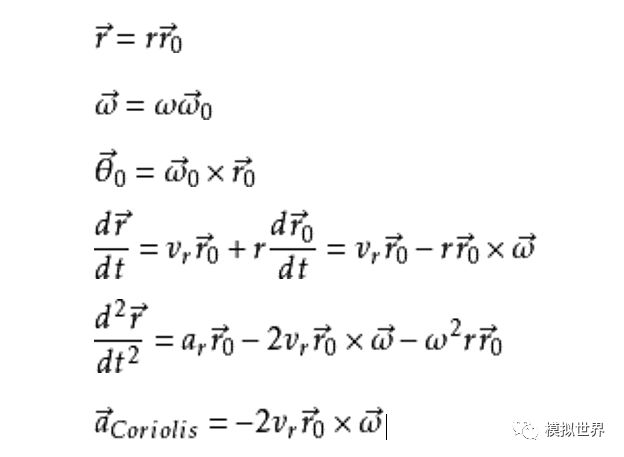
在空間設立動態坐標系(見下圖)。用以下方程計算加速度可以得到三項,分別來自徑向加速、科里奧利加速度和切向加速度。
如果物體在圓盤上沒有徑向運動,科里奧利力就不會產生。因此,在MEMS陀螺儀的設計上,這個物體被驅動,不停地來回做徑向運動或者震蕩,與此對應的科里奧利力就是不停地在橫向來回變化,并有可能使物體在橫向作微小震蕩,相位正好與驅動力差90度。
角速率由科氏加速度測量結果決定:
·科氏加速度 = 2 × (w × 質量塊速度)
·w是施加的角速率(w = 2 πf)
通過14 kHz共振結構施加的速度(周期性運動)快速耦合到加速度計框架。科氏加速度與諧振器具有相同的頻率和相位,因此可以抵消低速外部振動
?該機械系統的結構與加速度計相似(微加工多晶硅)
?信號調理(電壓轉換偏移)采用與加速度計類似的技術
施加變化的電壓來回移動器件,此時器件只有水平運動沒有垂直運動。如果施加旋轉,可以看到器件會上下移動,外部指將感知該運動,從而就能拾取到與旋轉相關的信號。
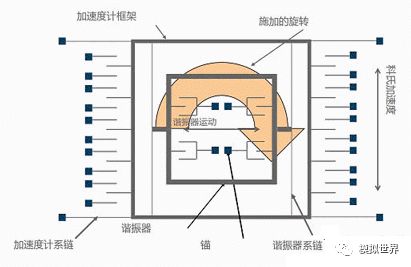
上面的圖例,只是抽象展示了陀螺儀的工作原理,而真實的MEMS陀螺儀內部構造是下面這個樣子的:
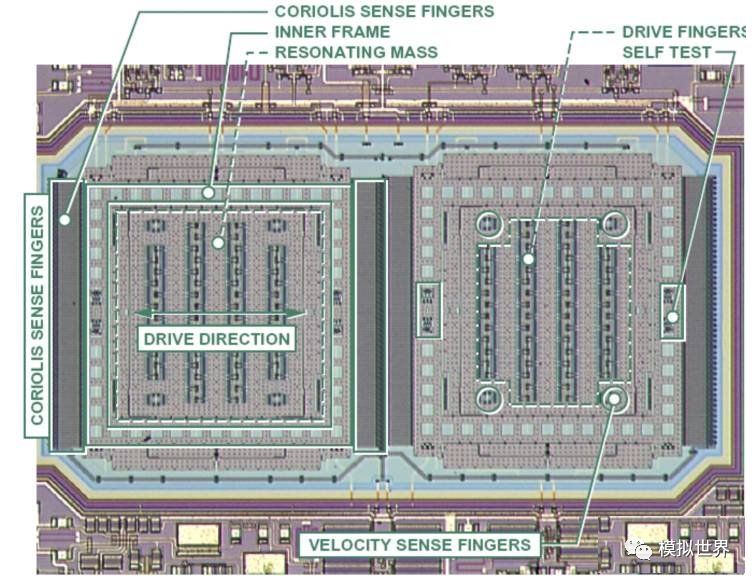
MEMS陀螺儀通常有兩個方向的可移動電容板。徑向的電容板加震蕩電壓迫使物體作徑向運動(有點像加速度計中的自測試模式),橫向的電容板測量由于橫向科里奧利運動帶來的電容變化(就像加速度計測量加速度)。因為科里奧利力正比于角速度,所以由電容的變化可以計算出角速度。
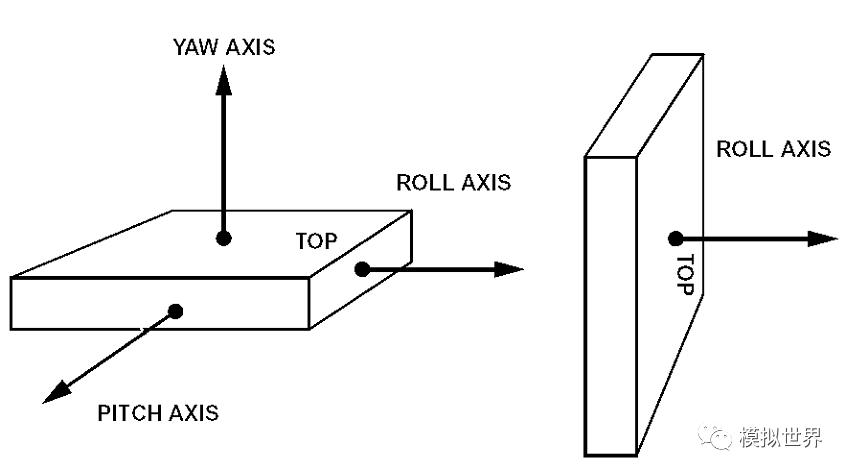
陀螺儀可以三個一起設計,分別對應于滾動(Roll)、俯仰(Pitch)和偏航(Yaw)三個軸。任何了解航空器的人都知道,俯仰是指航空器的上下方向,偏航是指左右方向,滾動是指向左或向右翻滾。
-
陀螺儀
+關注
關注
44文章
792瀏覽量
98973
原文標題:自動駕駛基礎(六十五) --慣性測量單元(IMU)十一
文章出處:【微信號:Analog_World,微信公眾號:模擬世界】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【話題】特斯拉首起自動駕駛致命車禍,自動駕駛的冬天來了?
自動駕駛真的會來嗎?
細說關于自動駕駛那些事兒
自動駕駛的到來
自動駕駛安全保駕護航的三個關鍵技術
自動駕駛汽車的定位技術
自動駕駛汽車的處理能力怎么樣?
自動駕駛線控底盤VCU功能介紹
使用ADIS16495 6自由度慣性測量單元推算自動駕駛車輛的航位
自動駕駛基礎 慣性測量單元(IMU)





 工商網監
工商網監
評論