 關于機器人運動控制系統分析介紹
關于機器人運動控制系統分析介紹
隨著機器人制動器從液壓型向全電氣化的轉變,電子零件供應商現在已經能夠提供全部的電機控制參考零件,例如電動機、MOSFET晶體管、驅動器、處理器、控制算法以及電源連接器。
機器人運動系統通常是采用電子器件實現控制、液壓系統實現動力或者說是"機器人的肌肉"。現在電動機技術取得了先進的發展(如無刷電機和步進電機),電動機控制零件(從MOSFET/IGBT到門驅動器)、傳感器技術、控制處理器和算法,全部都可以采用電氣化方式來實現。比如我們可以采用電動機實現制動,取代傳統的液壓活塞方式。
大多數人都支持這種趨勢,根據ABI研究協會的調查,"消費機器人市場到2015年會實現3300萬的出貨量,總體市場份額會達到35億美元。2025年前,出貨量和市場份額都會顯著增長,ABI研究協會預測出貨量會達到165百萬套,總的市場份額也會在翻四倍多,達到170億美元。"更進一步講,作為大型機器人系統供應商的Keller HCW GmbH指出"工程師更愿意在一些敏感的應用中使用電動機,不僅滿足更寬泛的要求而且更容易維護和調試。"
有一個好消息就是從采購和開發的角度來看,開發一個全電氣化的機器人制動器或者運動控制子系統再簡單不過了。電子零件供應商提供了非常多的選擇和開發板卡。這些工具能夠幫助工程師驗證他們的概念設計、完成具體的應用代碼、驅動電機、完成機器人運動控制系統大部分設計的驗證。
這篇文章介紹了一些機器人相關的參考設計和開發板卡,解決了工程師所面臨的一些挑戰,為實現機器人系統提供快速、精確和強大的電機控制解決方案。參考設計和評估板卡之間又有哪些不同呢?從某種程度上看,只是語義和使用角度的不同。一個參考設計時一個全面的隨時可以應用的設計,具備原理圖、材料清單(BOM)、PCB、性能測試數據、以及其它具體功能方面所要求的,對于用戶來講研究或者修改方面靈活性不高。舉個例子就是某個LED自定義電流負載驅動器的參考設計。
正好與其相反,評估板卡的設計就是用來測試某些功能或者組件的,可能會包含一些額外的測試相關電路或者功能模塊,這些可能在最終的設計中是不需要的。這些工具包會省去PCB和材料清單相關信息,但是我們仍然可以拿過來用于實現系統設計。現實的情況是供應商提供的資料一些只是作為參考設計,一些只是用于評估開發,而且很多都具有一些交叉屬性。
一個典型的運動控制系統參考設計(如圖1)包括如下組件:
1. PC端實現的運動控制算法以及用戶接口,對于性能和功能可以自定義開發。 2. 驅動/接口板卡(或者其他名字)能夠為MOSFET/IGBT驅動器提供底層的控制信號,我們可以借助各種類型的接口(比如USB、SPI、I2C等協議接口)與PC端連接。 3. MOSFET/IGBT驅動器能夠提供獨立信號用來開啟和關閉MOSFET/IGBT器件的電源,可以說這是實現低壓電子控制高壓設備之間的接口。 4. MOSFET/IGBT能夠提供切換和控制電動機繞組的電源。 5. 就電動機而言,通常是無刷直流或者步進電機,有時候也可能采用交流電機,直流電機通常多用于中低端電源應用場景,在高電壓和工業級應用則多采用交流電機。 6. 可選的反饋傳感器(編碼器或者霍爾效應等等)以及接口電路,在一些控制型設計中是必需的,這樣系統才能判定電機的實際情況(轉速、加速度等),進而控制器對電機的控制實現更新矯正。
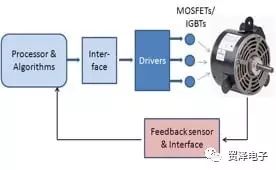
圖1 上圖展示的是處理器和算法、電動機以及反饋環節,我們還可以增加其他關鍵的功能模塊,每一級的功耗和電壓一次提升
一款通用的開發套件
這款全面的參考設計包括電機驅動器、接口電路、PC端的電機控制算法和開發工具,甚至提供了電纜和連接器,實現MOSFET和電動機的供電,有時候也會提供電動機。這些電路和布局設計可以用于最終設計或者輕微修改即可。
評估板卡的設計不是很全面,通常需要多塊電路板的組合才能實現與PC機的連接,這樣PC上的驅動算法才能夠為高壓電路或者電機接口提供驅動信號。它們屬于我們臨時構建的模塊,可用于后續的最終系統設計中。
介紹一款開發套件——亞諾德(ADI)半導體公司推出的AD-FMCMOTCON2-EBZ(見圖2)開發板卡,它是一款全面的高性能的伺服系統,支持三相永磁同步無刷直流電機或者步進電機,功率支持48V20A。能幫助工程師實現快速建模以及電機控制算法的開發實現。
圖2 亞諾德(ADI)半導體公司推出的AD-FMCMOTCON2-EBZ開發套件:上面是無刷直流電機負載,以及AD-DYNO2-EBZ功率測試電機,下面是驅動板卡,左面的是控制器板卡(來源:ADI公司)
這款開發套件包括兩塊板卡和軟件工具,通常很多機器人和運動控制應用都需要至少兩個電動機來實現X和Y方向的移動,這個套件支持兩個獨立的電動機,獨立供電操作,所以兩個電動機之間的電壓互不干擾。
驅動板卡集成了ADI出品的絕緣柵驅動器支持高頻信號輸出,電流和電壓測量同樣使用隔離的模擬數字轉換器(ADC),因此由于非絕緣導致的安全問題能夠有效的避免,盡管我們可以采用傳感器的反饋,但是也支持無傳感器的控制模式或者無刷直流電動機。我們設置了過電流和反向電壓保護,當我們在設計中使用QDESYS電動機控制IP核和以太網模塊時,用戶可以實現矢量控制算法(FOC),集成到FPGA項目中并進行一定的優化(如圖3)。

圖3 在QDESYS電機控制IP和以太網模塊設計的基礎上實現矢量控制算法和PWM電動機控制操作,能夠設置關鍵參數以及性能檢查(來源:ADI)
還有一個特性就是AD-DYNO2-EBZ支持功率監測擴展了整個驅動系統,這個可動態調節的負載系統用于測試實時電機的控制性能。功率測試計包括兩個無刷直流電機,并且是直接耦合的:一個作為負載并且有自己的嵌入式控制系統,另一個電動機則主要用于用戶的自定義功能開發,采用AD-FMCMOTCON2-EBZ FMC板卡實現驅動。
采用高級抽象命令實際上降低了處理器的負載。位置控制器是可配置的,支持不同類型的電動機、位置移動范圍以及其它參數,如數據、加速度、減速、保持電流和安全位置。這個模塊可以重新編程實現檢測和作用于轉子的機械阻塞效應。它支持步進電機的細分控制,如1/2, 1/4, 1/8和1/16細分模式,可編程的峰值電流最高達800mA以及20KHz PWM方波調節信號,支持快慢的衰減模式自動化選擇。配置方式還支持32個控制節點,斜率控制、可控的PWM信號頻率和抖動(避免共振)。
不要忽略掉連接器
當一個設計中包含電動機,一般我們選擇的低電流和低電壓的連接器并不適合MOSFET/IGBT驅動板卡和電動機之間的互連。主要有以下幾個原因:
電動機的電流和電壓可能比PC主板的典型電壓值高一些;
電動機連接在操作過程中經常會出現震動,主要是由于操作條件和處理不當引發的不同類型的機械震動問題;
當我們在調試階段需要測試不同的電動機、不同的速率或者評估電氣或者機械方面的技術問題,這就需要經常連接/斷開電動機;
固定鍵控連接器對于避免誤連接至關重要,但是在高壓和高電流情況下有很多麻煩;
連接器必須能夠提供全面的保護,如由于疏忽造成的誤接觸,尤其是當電壓超出安全限制的情況。這與應用場景和不同的國家標準相關,但是通常情況下是50V;
緊湊高密度的主要用于低壓電子信號,可能不符合UL、CSA、CE或者其他監管部門定義的間隙要求。
幸運的是又一款易用易斷開的連接器,非常適合電動機的高壓和高電流要求,能夠有效的避免上面所提出的技術問題,而且不會限制工程師設計的靈活性。
舉個例子,Molex FiT連接器不僅能夠輸送電源,而且支持線對線、點對板卡、板卡對板卡之間的連接(見圖4)。Molex系列連接器主要有五種產品,插針間距從2.50mm到5.70mm,每種都具有不同的電源等級。Nano-Fit是最小型的一款,支持20——26AWG規格的線纜以及250V5A。Mega-Fit是最大型的一款,支持12——16AWG規格的線纜以及600V23A的電力傳輸。
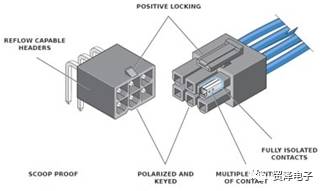
圖4 MOSFET/IGBT驅動器與電動機之間的連接器必須能夠處理高壓和大電流情況,滿足電力的傳輸。Molex FiT系列連接器有五種不同的尺寸,能夠提供可靠安全高性能的連接(來源:Molex)
該系列的所有連接器都是相同的形狀但是物理尺寸是不同的,都具有卡扣避免異常斷開連接,而且能夠有效的避免人員的誤觸。為了提升可靠性和降低壓降和功率損失,每根連接管腳都具備多個點的金屬對金屬的接觸。
結論
參考設計和評估板卡對于機器人系統設計越來越重要,這樣可以加快產品開發,縮短產品面市的時間,尤其對于一些具有戰略意義的應用來說非常重要。隨著運動控制和機器人系統逐漸全部采用電氣化/電子方式來實現,對于那些液壓器的需求就會越來越少,IC器件供應商能夠為整個系統或者子系統的設計提供全面的硬件和軟件設計支持。也就是說工程師從事這方面的工程設計具有更多的選擇性,采用最有的方式來解決開發過程中遇到的運動控制問題,最好拿出最優的解決方案。
-
機器人
+關注
關注
211文章
28641瀏覽量
208397 -
人工智能
+關注
關注
1796文章
47666瀏覽量
240272
發布評論請先 登錄
相關推薦
時間域控制系統分析及拉普拉斯變換Fortran程序解答
基于CAN總線和雙傳感器仿人機器人運動控制系統的研究
數字控制系統的詳細介紹和應用以及系統分析和設計中文資料免費下載





 工商網監
工商網監
評論