 圖靈機制到底是什么圖靈機制的詳細資料講解
圖靈機制到底是什么圖靈機制的詳細資料講解
我認為圖靈機制在誕生在很早的生命階段,現在的圖靈機制是大腦皮層高度擴大之后,提供的擴展能力呈現出來的,至少我認為從有眼睛開始注意機制就應該存在了,只是那個時候更多是一種反射機制,舊腦連接,新腦是爬行類之后才開始出現的。
我們需先回顧圖靈機來說我們為什么管這個機制叫圖靈機制。
圖靈機
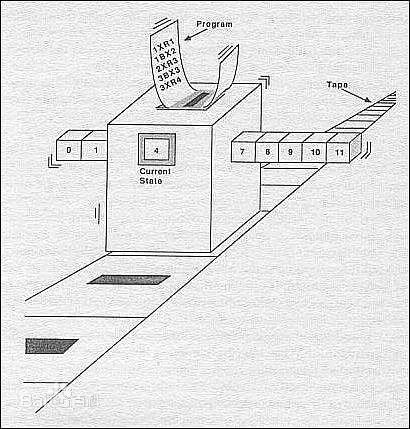
圖靈機是艾倫·圖靈1936年提出的一種抽象計算模型。
它由三個部分組成:紙帶,帶狀態和讀寫頭的控制器,對照表(也叫控制指令)。
對照表的構成
| 輸入 | 當前狀態 | 輸出 | 下一個狀態 |
| 紙帶的讀取內容 | 內部狀態機的值 | 對紙帶的寫操作內容 | 狀態的遷移 |
圖靈機的工作過程:讀取當前紙帶內容T和當前狀態S,根據對照表P,決定下一步的動作A,產生新的紙帶內容T’和新的狀態S‘。
紙帶的讀取頭就是注意力之下的輸入信息,輸入信息和當前狀態構成了當前的廣義狀態。當前廣義的狀態,通過查表獲得應該采取的動作,采取的動作進一步影響紙帶和內部狀態,即影響這個廣義狀態。
一臺圖靈機,對照表,紙帶的初始狀態,都是確定的,因而整個過程是確定的,就像一段固定的程序一樣。
而通用圖靈機是一種可以模擬任何圖靈機的圖靈機。通用圖靈機的思路是:將圖靈機表述為一個字符串,放到紙帶上,通用圖靈機通過設定恰當的對照表,讓這個通用圖靈機可以實現這個具體圖靈機的效果。
圖靈機制
我們先來看一個簡單模型。
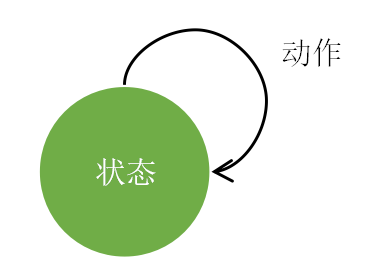
狀態產生動作,動作影響狀態,這是一個非典型的狀態機抽象(不是有限狀態機),我們叫原初狀態機。考慮到現實世界的并行性,我們可以這些拆解和設計這個狀態機,動作和狀態是兩個完全并行的模塊,兩者之間的關系是一個持續互聯的狀態。動作持續參考著狀態,也可以持續影響著狀態。這是典型的讀寫思維,也可以叫讀寫視角,將事物的相互作用看成是讀寫,或者將實體與抽象邏輯以讀寫短視角分離。但真實物理世界都是相互同時影響,甚至是動態平衡的,難以以離散化的序列視角來表示,所以原初狀態機不是描述萬物的模型,而是描述一類視角下的世界規律,尤其是因果序和算法思維。
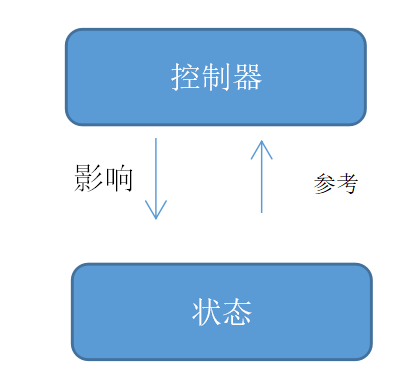
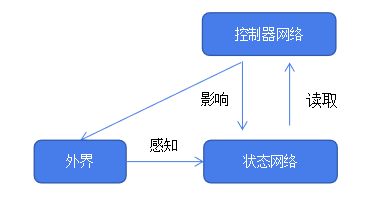
但這個模型存在一個問題,就是如果計算資源和帶寬資源的有限,使得當狀態空間十分巨大時,比如狀態是這個世界的所有可觀測狀態,那么動作控制器是無法獲取這些全部信息的,所以我們將模型進行改進成下面這個樣子:

引入注意力后,我們才認為這個模型能有效運轉,特別注意的是,注意力也是一種運動資源,控制器輸出的動作也能影響注意力的變化。但前面不帶注意力的模型,也有它的價值,沒有注意力,它可以得到全部數據,能做很多注意力不能做的事情,我們將前面的模型稱為廣義狀態機模型。
而將這個帶注意力的模型,稱為廣義圖靈模型,將基于這個模型運轉的機制稱為廣義圖靈機制,簡稱圖靈機制,而這個模型的運行過程我們成為廣義圖靈過程。
注意力(讀寫頭)、注意力的變化(左右移動讀寫頭)、對狀態的讀寫(內部狀態+紙帶)這幾個特征跟圖靈機有非常明顯的匹配,所以我們才有了用圖靈來命名這個機制的動機。
圖靈機制呈現的結果就是完成一個系列的動作,只是這個動作的產生過程可能是高度有秩序的,可以完成既定目標任務的,所以計算模塊的結果反映到對外部設備的控制后,就產生了對世界的現實影響。
腦中的圖靈機制
那么,這和類人智能又有什么關系呢?
簡單的說,注意力是圖靈機制的核心,注意力也是大腦的一個核心功能,這一點上兩者是相同的,而廣義圖靈機制是一個基于注意力的通用性很強的機制,我們可以用它來描述我們大腦的工作方式:將大腦的神經網絡狀態看做是狀態,將運動控制看做是影響狀態的控制器,當然運動控制會影響世界,世界狀態的變化又來過來被核心所讀取。所以整個過程就是一個廣義圖靈過程。因而我們認為大腦內部存在廣義圖靈機制,只是我們需要破譯其控制器的工作原理。
那么進一步細化大腦的圖靈機制應該是什么樣的呢?我們先畫一個不太嚴謹的圖,大致細化一下大腦的圖靈機制。

我們會發現,一些邊界不是特別好確定,我們甚至不能說清楚注意力是否屬于核心網絡,數據流是否如圖中所述,大量的智能任務是否可以采用這個機制解釋。對此我們需要對很多環節進行優化,調整以爭取得到一個更加完美的機制模型圖。
基于之前的研究思路,我們先將可能有用的東西,都拿過來,看是否有可能產生一些新的融合。之前的幾個關鍵機制分別是:完形機制、目標驅動機制、新奇與異常機制。
完形機制的主要目的是尋找實體的邊界,然后實現實體的剝離,從而可以對實體的屬性、實體和實體的關系進行計算。
那么完形機制為什么要找實體呢?我們說是為了離散化、語義化和符號化,那么符號化就是圖靈機中的符號表,圖靈機的定義是基于離散的語義符號為基礎的,也就是說,有了符號化,我們的圖靈機制就可以像一臺真的圖靈機那樣去工作了。而圖靈機能做什么?執行程序,程序=算法+數據結構,程序就可以解決計算問題。計算是什么?是一個更加復雜的命題,計算理論專門借助數學理論研究計算的過程和功效,已超出本文討論范圍。值得一提的是,大腦中雖然有廣義圖靈模型,并不意味大腦全部都是圖靈模型,很多局部組件可能是一種計算模型,甚至有可能有些連計算模型都不是,一些生化反應甚至量子效應有可能超出計算模型的范疇。
既然圖靈機是一種計算模型,那么我們認為廣義圖靈機是一種廣義計算模型,什么意思呢,先來看可計算的數學定義:定義域為D和范圍為R的函數f有一個確定的對應關系。通過這個對應關系使R范圍的單個元素f(x) (稱為 值) 和D定義域的每個元素x(稱為變元)聯系起來。如果存在這樣一種算法,給定D中的任意的x,就能給出f(x)的值,那么說函數f是可計算的。
如果我們將x換成狀態,將f(x)的值換成是控制信號,那么這是一個典型的信號控制系統,f就是信號轉換過程,我們說計算就是一個算法步驟實現了這個轉換。而廣義計算就是運動控制可以改變世界,世界又被反應到觀察里,我們可以尋得一個層面(用完形機制),讓一個確切的狀態發生時,通過有線步驟,產生另一個確切的值。為什么要尋得一個層面呢?因為世界是可變的,只要尋得一個層面才能讓無限的變化中抽取出不變性來,不變性才能以離散符號集合表示有限的輸入集,才能做相等判斷,而相等判斷是計算模型的一個核心操作。一個操作指令的結果幾乎每次都是不可能產生相同的結果的,如果我們數據化這個世界,就不可能產生相等判斷了,所以面對現實世界,大腦內部產生的不變性可用于判斷結果的相等性,這是面對無限非數據化世界而進行離散化的目的和意義。算法是問題求解的一種高效手段,很多問題在使用蠻力、條件反射、并行無法解決時很多可以采用算法的方式搞定,所以我將圖靈機制看做是智能的一個核心機制。
腦中圖靈機制的意義便在于此。
我們應該還可以注意到,符號化之后,很多狀態與操作之間的映射是可以通過查表解決的,即所謂的規則,當然要知道映射不一定非得是符號的形式,但面對一些重要計算問題,符號化是必須的過程,因而這個查表再結合到我們的腦中圖靈機中,就更像真實的圖靈機了。
異常和新奇機制,我們已經闡述為是一種完整性的判斷,也猜測由于舊腦的作用,缺失信號會引起注意,所以這個機制最大的啟示是注意分為主動注意和被動注意。
目標機制的過程是這樣的,當我們產生了一個目標,我們會產生如何達到目標的方法,如果不能直接搞定,就涉及目標的拆解,目標和目標達成是一個持續的過程,目標的拆解最終還是要產生為了這個目標而做的決策,即運動控制指令,期間發生的異常會中斷已發出的運動控制指令。目標和運動控制指令之間的關聯,可以看作是一種映射關系,這種映射關系,與圖靈機制的關系就是它是一個規則表,是圖靈機制的一個核心。
最后我們來看看工作記憶、世界模型和工作空間。這三個概念在一起,是我認為三者是同一個事物的不同表述。
在腦中建立一個可操作的空間,是十分有利于智能體的方法。我們在做出相應的決策前,可以在腦中嘗試推演如果做了什么就會發生什么的演練,腦內演練可以降低我們真實做出動作后的失敗率。
世界模型還給腦中圖靈機一個在腦內直接操作狀態的快捷方式。世界模型的價值已經被業界所重視,其意義和本質,我們將在世界模型一章中詳解。
回到前面的廣義狀態機制,我們來看生物智能中如何尋得痕跡呢?
最簡單的條件反射,甚至漫反射機制,我們都可以抽象成這樣一個過程:當有外界刺激發生時,整個神經網絡的狀態受到刺激而發生了改變,這個改變會引發后續的連鎖反應,進而整個網絡狀態在不斷地遷移變化,有一些變化,可以產生有效的動作后果,有一些可能沒有外在的表現,所以我們可以看到進化史上最早期的動物的神經網絡甚至的人類的舊腦,大量存在的硬連接,都是這樣一種表現,我們可以將他們看做是一個狀態機,整個神經網絡甚至包括外在世界的狀態本身既是控制器,又是狀態,就回到我們最初那個單一節點的閉環模型,那為什么這種狀態機不能解決所有的智能問題呢?
因為這樣的狀態機處于一種粗放的直接映射模式,即狀態之間的遷移為整個狀態的變化,之間的映射空間十分巨大,這導致它幾乎不可能用有限的神經元網絡,解決所有的問題,所謂解決所有的問題,就是要用組合的方法應對世界的組合特性,無論是空間上的還是時間上的,我們通過解構不變性可以解決空間上的組合問題,通過圖靈機制算法上的序列組合解決時間上的組合問題。任意靈活的指令組合可以解決各種各樣的問題,我們在現實世界中,學習了大量的流程范式,不就是為了能夠套用在各種智能任務的解決上么?
因而從狀態機視角的演化,我們可以看到生物智能進化的方向,即讓狀態機進行升級,抽象出新的組件,從而應對更多的變化。
比如單純的映射狀態機面臨效率和容量問題之后,就是類似于舊腦這樣的結構化分工,就不是單純的一個狀態機可以描述的,如果用上圖來拆解狀態機的話,我們可以認為控制器網絡內部變得更加結構化,有了更多的分工協作。到底如何分工效果更好,進化給出了眾多選擇,它們的內在機理是眾多科學家們在深入研究的課題,一時半會應該也不會那么容易破解。這個過程中,就如我們所說基本的架構搭建完成,包括所謂的注意力機制、記憶機制、運動控制機制(小腦、基底神經節)、興奮抑制機制(情緒管理、危險控制、欲望管理等等)。這也是我們認為新皮層的主要能力是擴展舊腦機制的原因。
那么新皮層帶來了什么呢?
一、更高的靈活性,更靈活的可塑性。
二、更多的記憶能力。
三、更廣泛的特征抽取,各種抽象的概念、結構均得到表征和運用。
四、甚至在其上誕生了新的機制,這個機制可以反過來抑制舊腦機制,以突破舊腦的束縛。比如所謂的自我意識,是否與動物已經有所不同,理性思維是否帶來了更多的思想和行動自由。
控制器的實現
我們注意到現在計算機主要是以通用圖靈機為基礎建立起來的,馮諾依曼體系結構更加貼近我們腦中的圖靈模型,但我們腦中未必是如計算機那樣,通過存儲程序然后運行指令來工作的,但兩者確實具有十分相似之處,本小節,我們將深入探討,圖靈機制的一種實現方式,并來對比它和計算機組成結構的異同。
剛才我們初步討論了,改變外界是通過輸出信號,接收狀態信息是用讀取的方式,那么倘若有讀取發生是如何發生的,倘若有寫入又是如何發生的,是否還有其他的機制方式,我們首先對讀寫的概念發出質疑,對于現在計算機而言讀寫是十分重要的接口。而反映到腦中,會是這樣么?首先讀的本質是進行信息導流,將信息從一個位置導入到另一個位置,這個移動在神經網絡中是自然發生的,所有信號的傳遞過程,都可以認為是下一個神經元對上一個神經元的讀,寫也類似,我們記憶下一個東西,就像我們往腦中寫入了什么一樣,記得有個電影《50次初戀》《記憶中的橡皮擦》主人公都會忘記每天的事情,導演觀眾都認可這個比喻,橡皮擦擦掉了寫在腦中的信息,所謂信息的記錄,就是神經之間的突觸連接實現的,關于記憶的難易有一些專門研究突觸可塑性的論文,在此不再贅述。所以在大腦中自然地無數讀寫都在同時發生,我們不需要專門的機構負責寫,因為隨處可寫,就地就寫,隨處可讀,在各個層面發生讀,微觀和宏觀都有信息的傳遞過程。
第二個問題,經典圖靈機中的讀寫頭,注意力的目標是尋址實現的,對于線性存儲器,有固定的起始位置,就可以讀取對應位置的數據,而大腦中是沒有地址這個概念的,注意力也不會限于固定的讀取大小,我們可以定義一個注意力函數a,令current_read = a(status),這樣通過一個未知的注意機制,完成數據的路由、消減工作,這是注意力十分重要的兩個價值:路由和消減。
第三個問題,查表,假設存在查表函數f,則rule = r(status, current_read),大腦中的可能并不只有規則,規則本質是map,大腦有類似的結構——關聯,當然也有規則,映射的規則,看到A就要做B,這樣的規則,但規則不是唯一的映射關系,我們之前討論結構與關系時,說過,很多看起來的映射關系是要標注屬性的,規則是一種映射關系,目標-行為也是一種映射關系,在不同的上下文下,有不同的綁定存在,這不是一個簡單的兩個神經元之間的連接的問題,而是對于一個綁定組,比如記錄了規則映射,當key受到激活時,value會接著受到激活,然后注意可以帶著目標來關注這個value,value就會被注意路由到它所需要的地方,比如發出運動指令。比如一個球飛過來,你就要有反應,首先判斷球的速度方向,然后在預測它接下來可能的軌跡,然后再發出運動指令,接這一個動作的運動指令也是相當復雜的,基本需要在參數確定下來的瞬間直接下放給訓練好的神經模塊,自動去完成。
當然還有一種可能就是不把value路由,而是value本身就在運動控制的地方,自動將其激活而發生運動控制。
第四個問題,執行。計算機中執行過程是這樣的,計算機中只有讀寫兩個動作,所謂的在紙帶上寫,和更改狀態,都認為是寫,反而我們看大腦中,由于讀寫并沒有明確的位置和階段,執行無法在讀寫頭這樣一個明確的位置發生,信息的路由過程,本身就在不停地改變整個大腦的狀態,這個過程中也在不停地發生寫動作,而經過流轉導向最終到達肌肉時,也自然地完成了運動控制的工作。
那么圖靈機制中的控制器到底是過程呢?它是如何做到如此靈活的呢?
控制器我們認為他可以向外界發出任何指令,比如你可以隨意的控制肢體的運動,不一定非要依賴感覺驅動,感覺驅動機制在19世紀就被心理學家所拋棄了。控制器里有神秘的意識,這個機制是最后的秘密。我無法對意識給出任何科學的解釋,我的職責是如何設計控制器以實現以下目標:
1. 自由控制,自由意志的體現,包括抑制舊腦,對注意力的控制,比如一件事情做著做著,突然就不想做了。我認為完全真正的自由是不存在的,很多找不到外界狀態依賴的自由意志的表現其實是隨機的結果,大腦本身在各個層面都具有很強的隨機性。
2. 根據當前狀態、結合知識,做出被動控制。
3. 支持自由控制和被動控制的組合控制。
4. 可以在有限的范圍內讀寫工作空間中的世界模型。
主觀體驗和意識并沒有列在這些目標里,因為我們并不知道,意識和主觀體驗是不是和顏色、三角結構一樣只是可感知的完全不同的概念而已,這些概念可以幫助區分自我和外界,除此之外,我還不知道它如何從功能上幫助完成了智能任務,或者哪些智能任務的完成,必須需要這個東西。
被動機制
類似于計算機的被動指令執行過程一樣,大腦的運轉需要這樣一個過程,首先我們要解決的是如何一步一步地執行指令,如何處理棧,上下文,如何基于當前狀態,發出新的指令,如何基于認知進行推理,所有這些細節,都涉及圖靈機制的正常運轉。這里我們盡量先摒棄純主動意識形態的自由控制層面,僅討論不在主觀故意干預的情況下,一些算法類的任務如何有效運轉。
傳統計算機是按照程序執行的,每條指令都可以改變整體狀態,同時讀取指令可以加載部分狀態,計算過程可以產生新的有特定目標的有意義的數據。馮諾依曼體系機構的現代計算機的實現方式是利用程序計數器,指令執行器的配合,在頻率發生器的驅動下,逐條執行指令。
執行指令的過程,又可細分為:取計數器的值,取指令、指令譯碼、執行指令、結果寫回。
跳轉和循環的實現就是篡改計數器的值。
整個通用過程是一套邏輯電路搞定的。
所以指令序列是核心驅動過程,通用性體現在程序結構中,可變性體現在內存上。
到了大腦中這些東西突然變得似乎簡單了,因為讀寫似乎分離了,記憶和控制在持續進行,而記憶和控制指令的發出,可能來自于自主意識也可能來自于條件反射,也可能是主意識基于當前狀態和規則做出的決策指令。我們重點研究的就是最后一種。
這個過程有個核心緩環節就是查表,查表的結果又自主意識決定時機和節奏。就像我知道要這樣做的,但是被自主意識決定何時進行這個動作,比如唱歌時節奏的控制,可以慢著唱也可加快唱。
這個節奏控制是一個目標只是有些外界引發的目標有些是自主選擇的目標,比如老師讓你唱的再慢一點,那么節奏既作為目標,又作為編織因素,會與喚醒的序列進行組合編排,本質是在一個符合目標的節奏上進行組合控制。
所以這里涉及兩個核心機制,一個是目標的保持,一個是查表征用。這已經探究到意識最核心的機制問題,這個到底是潛在不可觀察的機制呢?用計算機屬于是這個內核循環怎么寫?從并行的角度看,default network如何協同出這些機制來?
意圖或目標的產生我們可以認為受各種力量甚至隨機的綜合驅動而產生,有些是目標衍生目標。
總結
本文我們介紹了廣義圖靈機制,提出圖靈機制是大腦進化的結果,是廣義狀態機的進一步延伸,增加了注意力、符號化,使得神經網絡可以完成計算任務。也提出圖靈機制的誕生,解決了時間上的組合解構問題,從而配合特征不變性抽取一起完成了時空上的組合解構問題。
值得注意的是,圖靈機制并不是大腦中的唯一智能元素,它是為了解決某類復雜問題,而引入的機制,它也和其他機制相互配合,一起來完成智能體需要完成的各類智能任務。
圖靈機制是大腦中的符號處理系統,我想圖靈的工作就是將我們腦中的這個能力,以形式化地表述出來了吧,是一個偉大的科學發現和總結。
-
控制器
+關注
關注
112文章
16445瀏覽量
179447 -
神經網絡
+關注
關注
42文章
4779瀏覽量
101168 -
模型
+關注
關注
1文章
3305瀏覽量
49220
原文標題:圖靈機制
文章出處:【微信號:deep-learning,微信公眾號:深度學習】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
LABVIEW要怎么用webbrowser去提取網頁上的數據啊?
探討一下ARM微控制器與嵌入式系統之間的區別
CPU=運算器+控制器
圖靈機器人:“試愛機器人”的未來不可限量
詳解圖靈機器人,國內最早開放的人工智能機器人平臺
圖靈機是什么_圖靈機有什么用
圖靈機的組成部分_圖靈機的模型介紹
圖靈機有什么意義_學習圖靈機模型中遇到的問題
圖靈測試介紹 圖靈機的工作原理詳解

如何集成圖靈機器人,簡單實現語音聊天






 工商網監
工商網監
評論