 電子發燒友App
電子發燒友App


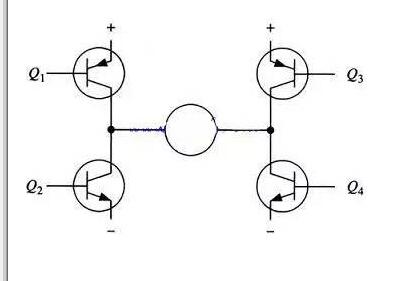
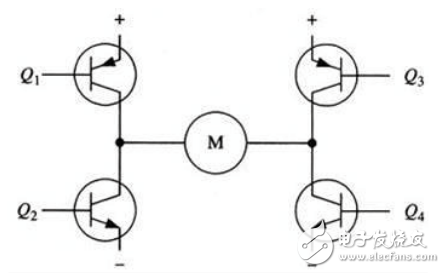
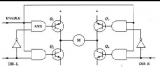
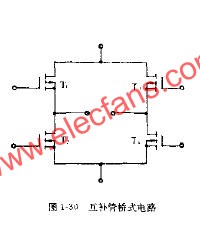
4個N溝道VMOS構成的H橋電路
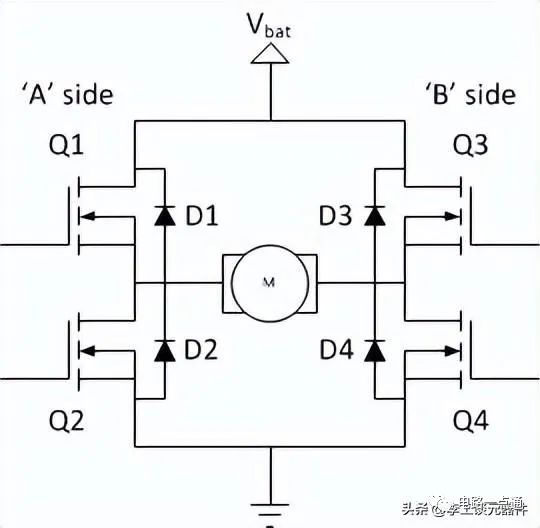
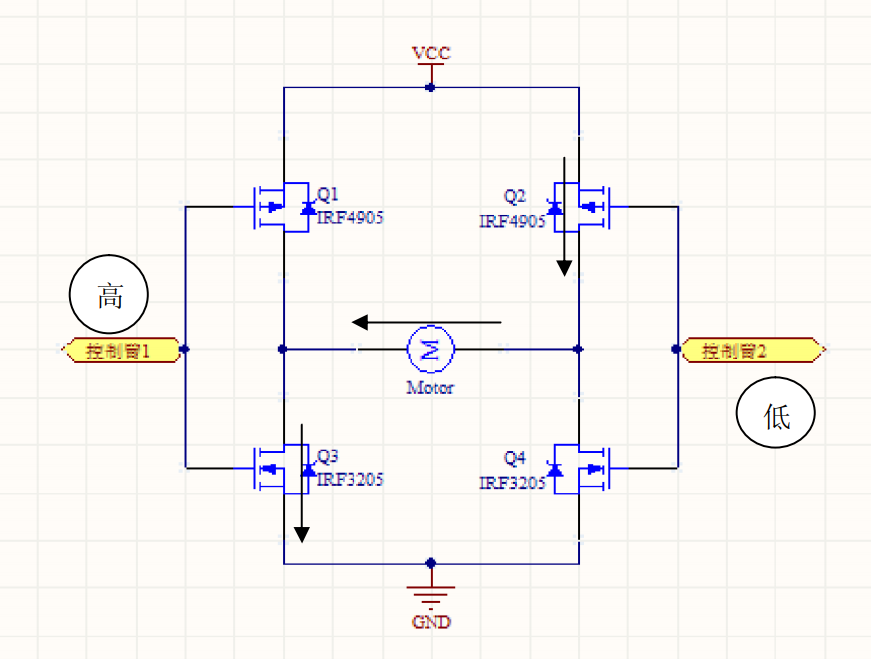
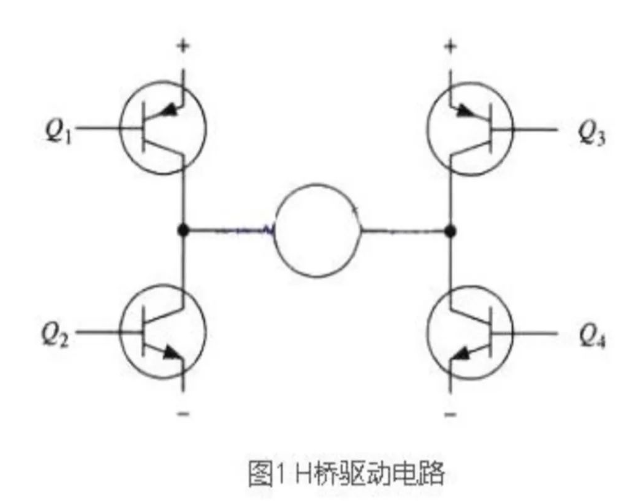
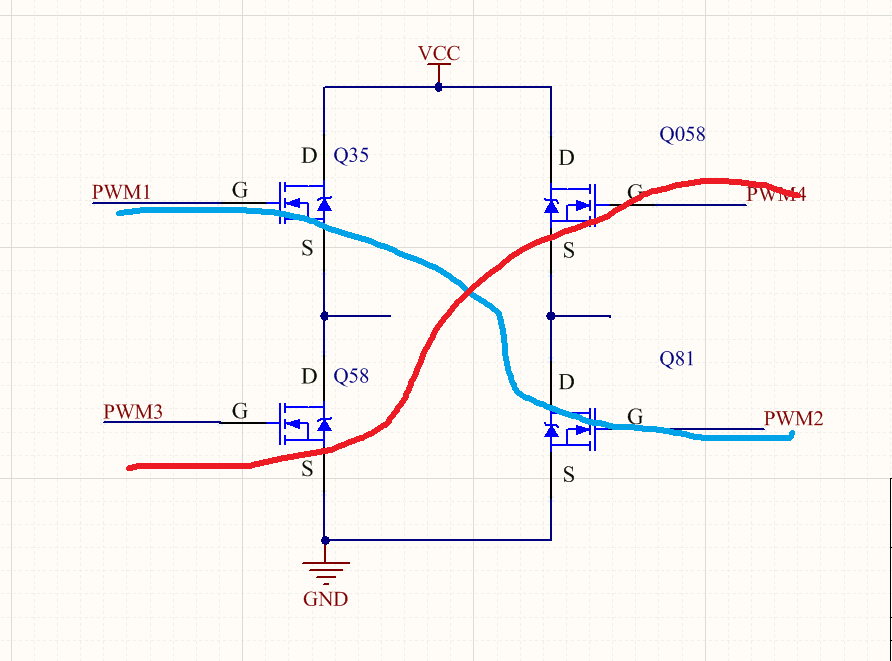
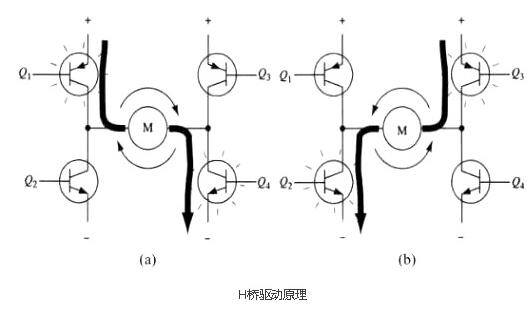
為實現電動機的正、反兩個方向的轉動,傳統的電機驅動電路一般都采用大功率的VMOS管構成H橋電路。VMOS管有N溝道和P溝道之分,由于制造工藝方面的原因,P溝道的VMOS管通過的電流較小,因此,一般采用4個N溝道的VMOS管構成H橋電路(如圖1所示)。

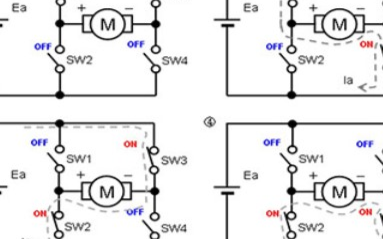
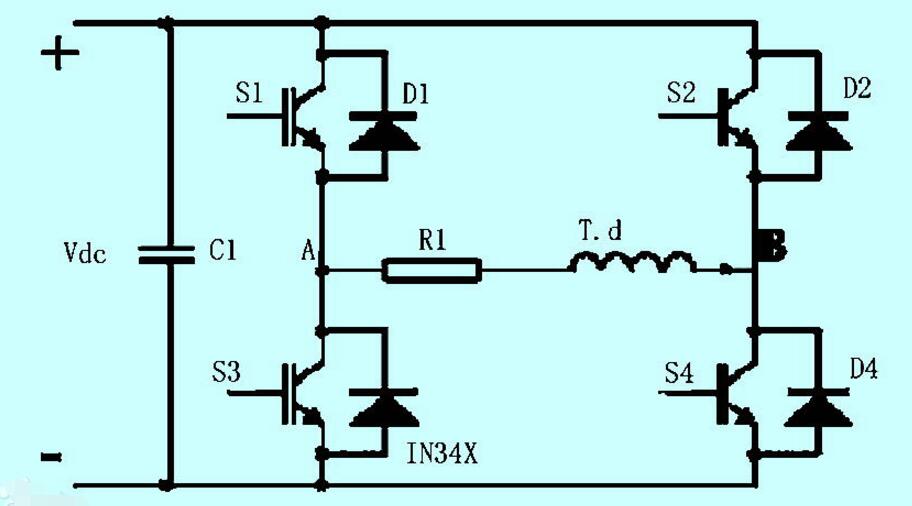
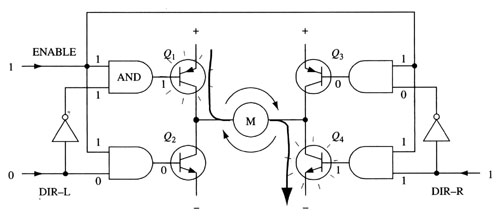
通過控制4個VMOS管的通斷可控制H橋電路中的電流方向,具體為:Q1,Q3導通Q2,Q4截止時,電機電流從左往右流;Q2,Q4導通Q1,Q3截止時電機電流從右往左流,這樣即可實現電動機正、反兩個方向的控制。電動機的助力大小是通過改變輸入的PWM信號占空比,從而改變VMOS管的通斷時間比例來實現 。圖1中R5為電流傳感器,負載電流經電流傳感器變為電壓信號,采樣這個電壓信號經過放大后送A/D模塊進行A/D轉換。當負載電流超過系統允許最大值時,控制器會轉入限流保護模式以防止系統過載損壞;同時負載電流反饋信號也可以作為電機助力大小的輔助控制參數。
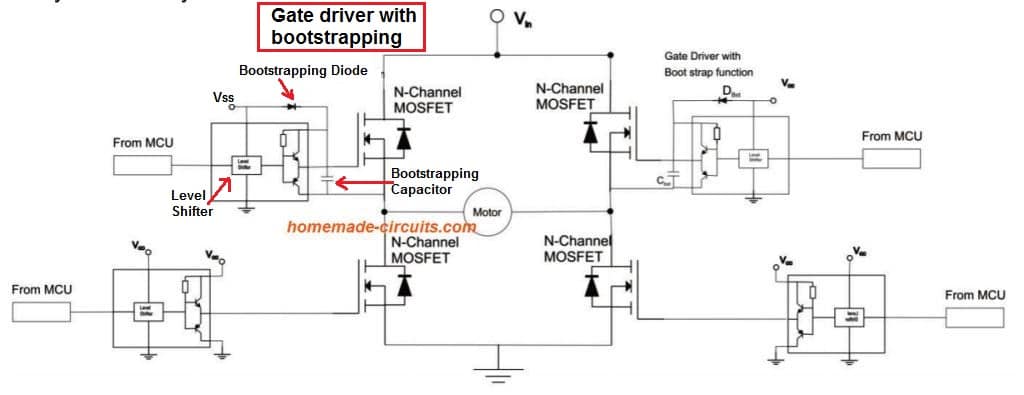
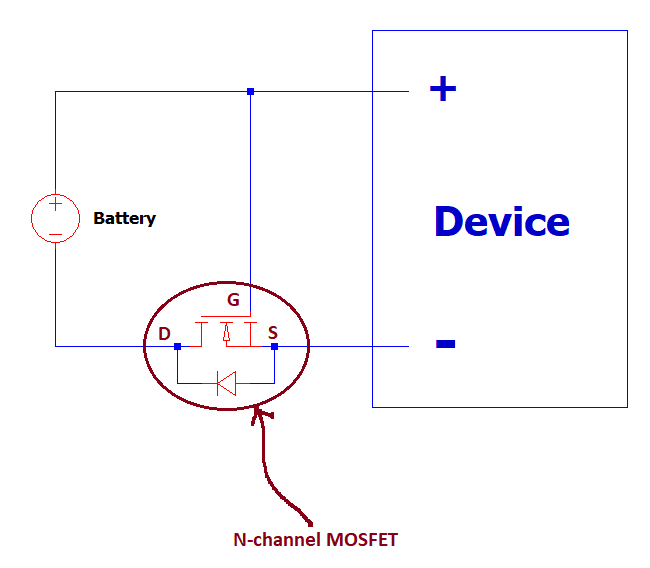
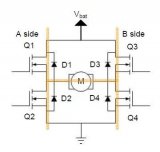
對于N溝道的VMOS管,要保證其柵極G和源極s之問的電壓高于+1O V,即Vas>+10 V,VMOS管才能正常導通。圖l所示H橋驅動電路,對于低端VMOS管Q3,Q4,可以直接在其G極和s極之問加+12V電壓以使其導通;但對處于高端的VMOS管Q1,Q2,根據Vcs>+IOV的要求,VMOS管導通后,G極的電壓應為:Vc>+(10 V+VDo)。VDo為車上蓄電池電壓+12 V,則Vc>+22 V。因此,傳統H橋電路中,對高端VMOS的控制需要利用升壓器件產生出+22 V以上的電壓信號或采用專門的驅動芯片來驅動。









 工商網監
工商網監
評論