 電子發燒友App
電子發燒友App


局域互聯網(LIN)是一種低成本的嵌入式網絡標準,用于連接智能設備。LIN最常見于汽車工業。
1. LIN概述
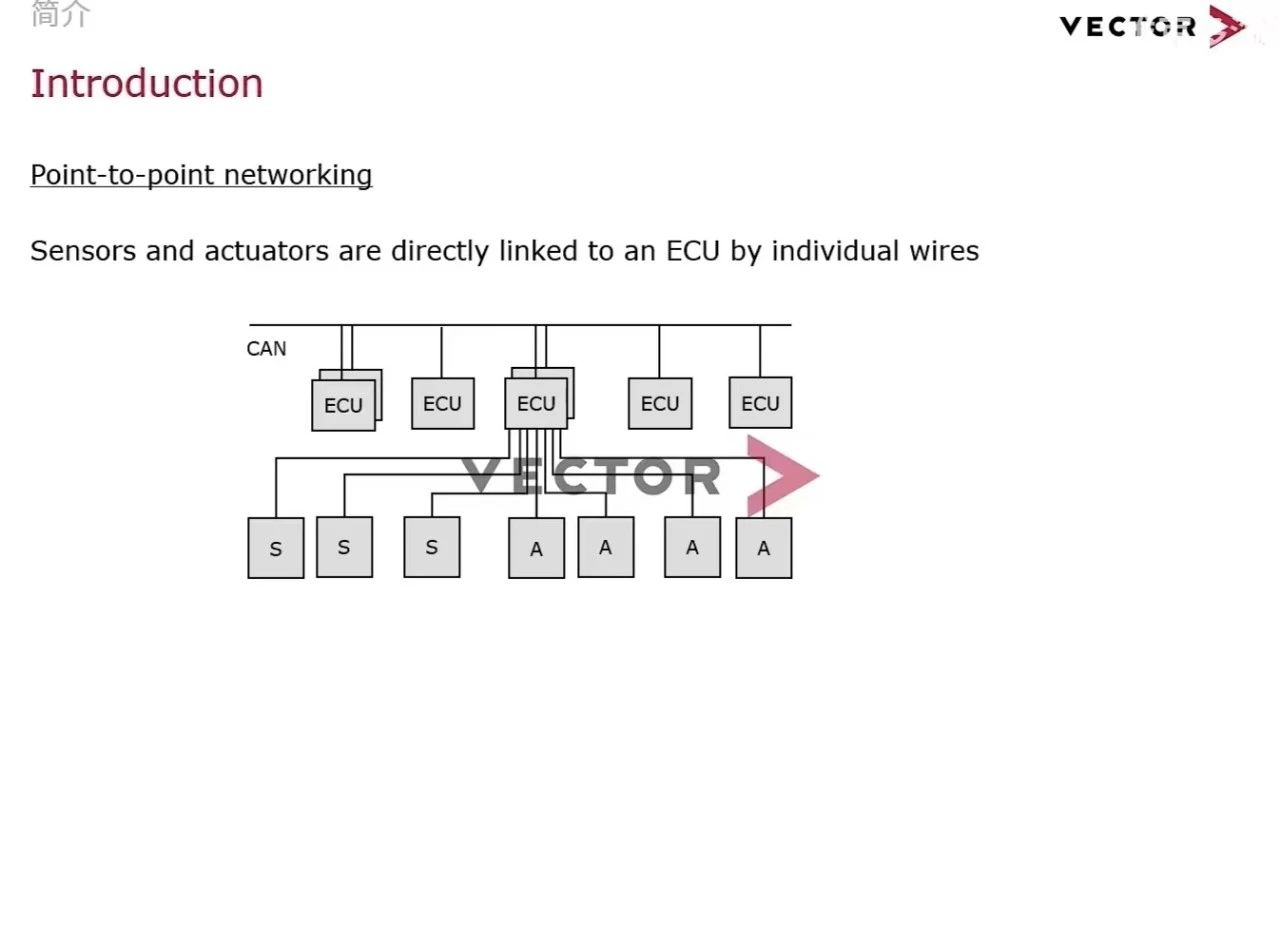
局域互聯網(LIN)總線是為汽車網絡開發的一種低成本、低端多路復用通信標準。雖然控制器局域網(CAN)總線滿足了高帶寬、高級錯誤處理網絡的需求,但是實現CAN的軟硬件花費使得低性能設備(如電動車窗和座椅控制器)無法采用該總線。若應用程序無需CAN的帶寬及多用性,可采用LIN這種高性價比的通信方式。用戶可在最先進的低價位8位微控制器中嵌入標準串行通用異步收發器(UART),以相對廉價的方式實現LIN。
現代汽車網絡包含各類總線。例如,在主體電子設備的低成本應用程序中使用LIN,在主流動力系統和車身通信中使用CAN,而在先進系統(如主動懸掛)中的高速同步數據通信中使用新興的FlexRay總線。
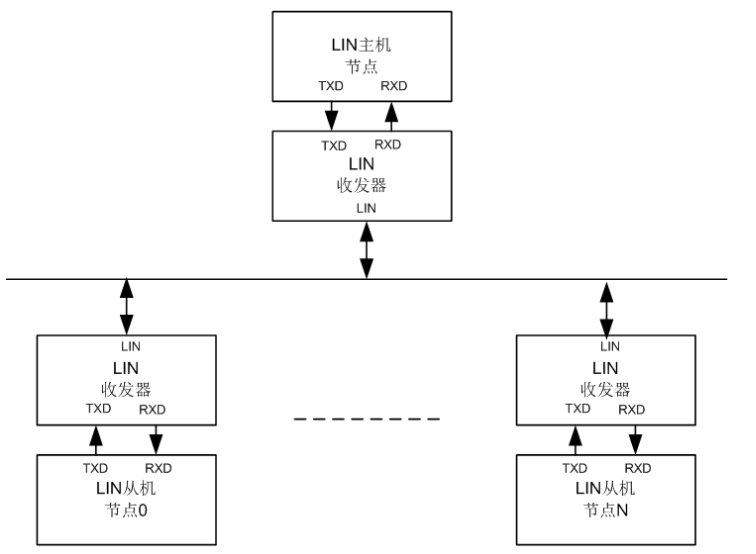
LIN總線采用主/從方法,包含一個LIN主方和一個或多個LIN從方。

?
圖1. LIN消息幀
消息標題包含一個中斷(用于標記幀的開始)和一個同步字段(供從節點同步時鐘)。標識符(ID)包含一個6位消息ID和一個2位校驗字段。ID表示特定的消息地址,而非目標。接收并解碼ID后,從方開始消息響應,該消息響應包含1至8字節的數據以及一個8位校驗和。
主方控制消息幀的排序,該排序在調度中是固定的。用戶可按需改變該調度。
LIN標準更新過多個版本。1.3版本最終確定了字節層通信。2.0和2.1版本新增了更多消息規范和服務,但仍與LIN 1.3版本的字節層兼容。

API對該功能不提供原生支持,但用戶依然可實現該功能。
表1. LIN 1.3、2.0及2.1版本對比
2. LIN幀格式
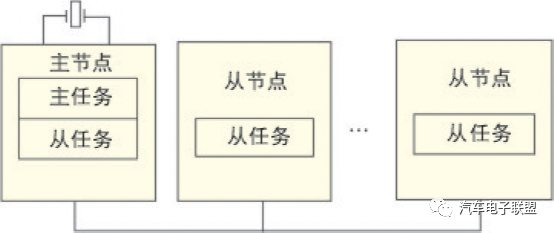
LIN總線是一種輪詢總線,帶有一個主設備和一個或多個從設備。主設備同時包含一個主任務和一個從任務。每個從設備僅包含一個從任務。LIN總線上的通信完全由主設備上的主任務控制。LIN總線上傳輸的基本單位是幀,每幀又分為標題和響應。標題總是通過主節點傳輸,包含3個不同的字段:中斷、同步(sync)及標識符(ID)。響應通過從任務傳輸,可位于主節點或從節點中,包含一個數據載荷及一個校驗和。
通常,主任務通過傳輸標題,在循環中輪詢每個從任務。該標題包含一個中斷-同步-ID序列。啟動LIN之前,每個從任務被配置為根據接收到的標題ID向總線發布數據或從總線訂閱數據。一旦收到標題,每個從任務將驗證ID校驗,并檢查ID,以決定選擇發布或訂閱。若從任務需要發布響應,將向總線傳輸1至8數據字節,后接1個校驗和字節。若從任務需要訂閱,將從總線讀取數據載荷和校驗和字節,并采取適當的內部動作。
對于標準從至主通信,主方廣播標識符至網絡,僅有一個從方響應數據載荷。
主至從通信伴隨著一個主節點中的獨立從任務。該任務自我接收發布至總線的全部數據,并以獨立從節點的方式響應。為了傳輸數據字節,主方必須首先根據需要傳輸的數據值,升級其內部從任務的響應。接著,主方將發布合適的幀標題,內部從任務傳輸其數據載荷至總線。

?
圖2. LIN消息幀
1. 中斷
每個LIN幀都以中斷作為開始,包含13個顯性位(額定),后接一個1位(額定)隱性中斷分隔符。中斷的作用是將幀的開始通知給總線上的所有節點。
2. 同步
同步字段是主任務在標題中傳輸的第二個字段。同步被定義為字符x55。同步字段允許進行自動波特率檢測的從設備測量波特率周期,并調節其內部波特率,與總線進行同步。
3. ID
ID字段是主任務在標題中傳輸的最后一個字段。該字段識別網絡上的每條消息,并最終決定由網絡中的哪些節點接收或響應每個傳輸。所有從任務連續監聽ID字段、驗證其校驗,并決定其是否是該特定標識符的發布者或訂閱者。LIN總線一共能提供64個ID。ID 0~59用于信號攜帶(數據)幀,60和61用于攜帶診斷數據,62預留給用戶自定義擴展,63預留給未來協議升級。ID作為一個受保護的ID字節通過總線傳輸,低6位包含原始ID,高2位包含校驗。

表2. 校驗計算方法
4. 數據字節
從任務在響應中傳輸數據字節字段。該字段包含1至8字節的載荷數據字節。
5. 校驗和
從任務在響應中傳輸校驗和字段。LIN總線采用2個校驗和算法之一,以計算8位校驗和字段中的值。經典校驗和的計算方法是單獨累加數據字節,而增強校驗和的計算方法則是累加數據字節及受保護的ID。
LIN 2.0規范將校驗和的計算過程定義為:累加所有值,且當總和大于等于256時減去255(與modulo-255或modulo-256不同)。根據LIN 2.0標準,經典校驗和用于LIN 1.3從節點,而增強校驗和用于LIN 2.0從節點。該規范進一步規定,ID 60~63應該總是使用經典校驗和。NI LIN接口允許設置校驗和類型為經典或增強。默認設置為經典。根據LIN 2.0規范,無論如何設置校驗和屬性,ID 60~63總是使用經典校驗和。
圖3顯示了主任務標題和從任務響應如何組合成一個完整的LIN幀。

?
圖3. 創建LIN幀
3. LIN總線定時
由于LIN總線是輪詢總線,處理每幀分配的額定時間槽如下:
THeader_Nominal = 34 * TBit
TResponse_Nominal = 10 * (NData + 1) * TBit
TFrame_Nominal = THeader_Nominal + TResponse_Nominal
處理每幀分配的最大時間槽如下:
THeader_Maximum = 14 * THeader_Nominal
TResponse_Maximum = 1.4 * TResponse_Nominal
TFrame_Maximum = THeader_Maximum + TResponse_Maximum
4. LIN拓撲結構及行為
LIN總線連接一個主設備(節點)和一個或多個從設備(節點),成為一個LIN簇。對應的功能文件描述了該節點的行為。節點功能文件輸入系統定義工具,生成LIN描述文件(LDF),描述整個簇的行為。系統生成器解析LDF,自動生成目標節點中的特定行為。此時,按照LDF中指定的方式,主節點主任務開始在總線上傳輸標題,簇中的所有從任務(包括主節點自己的從任務)開始響應。
總體來說,LDF用于配置及創建LIN簇的調度行為。例如,LDF定義了波特率、主任務傳輸標題時的順序及時間延遲,以及響應時每個從任務的行為。NI LIN硬件及用于LIN的NI-CAN幀API無法為LDF提供原生的完整支持,即用戶無法下載調度行為至硬件。但是,硬件提供了訪問總線的底層支持(寫入標題及發布或訂閱作為響應),用戶可在應用程序層創建調度行為。正如在NI LIN響應輸入幀類型的描述中所說,NI LIN硬件采用響應隊列存儲從任務響應。響應隊列保留64個響應,與每個為LIN指定的(最多64個)ID一一對應。這將確保LIN接口的從任務可在LIN規范規定的響應時間內響應標題。
用于LIN的NI-CAN幀API可通過一種穩健的方式完成與LIN總線的底層交互。終端用戶可使用基本功能,開發復雜應用程序,包括分析及原型化LIN網絡。用于LIN的NI-CAN幀API無法為LIN診斷或配置、LDF或調度表提供原生支持。但是,用戶可在采用用于LIN的NI-CAN幀API的應用程序中實現這些任務。













 工商網監
工商網監
評論