 電子發燒友App
電子發燒友App


ADC指模/數轉換器或者模數轉換器是指將連續變化的模擬信號轉換為離散的數字信號的器件。真實世界的模擬信號,例如溫度、壓力、聲音或者圖像等,需要轉換成更容易儲存、處理和發射的數字形式。模/數轉換器可以實現這個功能,在各種不同的產品中都可以找到它的身影。
ADC制造商在數據手冊中定義ADC性能的方式令人困惑,并且可能會在應用開發中導致錯誤的推斷。最大的困惑也許就是“分辨率”和“精確度”了——即Resolution和Accuracy,這是兩個不同的參數,卻經常被混用,但事實上,分辨率并不能代表精確度,反之亦然。本文提出并解釋了ADC“分辨率”和“精確度”,它們與動態范圍、噪聲層的關系,以及在諸如計量等應用中的含義。
adc的參數
1)分辯率(Resolution) 指數字量變化一個最小量時模擬信號的變化量,定義為滿刻度與2n的比值。分辯率又稱精度,通常以數字信號的位數來表示。
2) 轉換速率(Conversion Rate)是指完成一次從模擬轉換到數字的AD轉換所需的時間的倒數。積分型AD的轉換時間是毫秒級屬低速AD,逐次比較型AD是微秒級屬中速AD,全并 行/串并行型AD可達到納秒級。采樣時間則是另外一個概念,是指兩次轉換的間隔。為了保證轉換的正確完成,采樣速率(Sample Rate)必須小于或等于轉換速率。因此有人習慣上將轉換速率在數值上等同于采樣速率也是可以接受的。常用單位是ksps和Msps,表示每秒采樣千/百 萬次(kilo / Million Samples per Second)。
3)量化誤差(Quantizing Error) 由于AD的有限分辯率而引起的誤差,即有限分辯率AD的階梯狀轉移特性曲線與無限分辯率AD(理想AD)的轉移特性曲線(直線)之間的最大偏差。通常是1 個或半個最小數字量的模擬變化量,表示為1LSB、1/2LSB。
4)偏移誤差(Offset Error) 輸入信號為零時輸出信號不為零的值,可外接電位器調至最小。
5)滿刻度誤差(Full Scale Error) 滿度輸出時對應的輸入信號與理想輸入信號值之差。 6)線性度(Linearity) 實際轉換器的轉移函數與理想直線的最大偏移,不包括以上三種誤差。 其他指標還有:絕對精度(Absolute Accuracy) ,相對精度(Relative Accuracy),微分非線性,單調性和無錯碼,總諧波失真(Total Harmonic Distotortion縮寫THD)和積分非線性。
AD的選擇,首先看精度和速度,然后看是幾路的,什么輸出的比如SPI或者并行的,差分還是單端輸入的,輸入范圍是多少,這些都是選AD需要考慮的。DA 呢,主要是精度和輸出,比如是電壓輸出啊,4-20mA電流輸出啊,等等。DSP呢,用來計算嘛,所以主要是看運算能力了,當然,外圍的接口也是需要考慮 的。個人看法,TI的單DSP處理能力還可以,ADI的多DSP聯合使用的優點特別突出,當然了,不同檔次的DSP的運算能力和速度都是有很大差別的。
ADC的動態范圍精確度和分辨率
動態范圍被定義為系統可測量到的最小和最大信號的比例。
最大信號可為峰間值,零到峰(Zero-to-Peak)值或均方根(RMS)滿量程。其中任何一個都會給出不同值。例如,對于一個1V正弦波來說: 峰間(滿量程)值=2V 零到峰值=1V
RMS滿量程=0.707×峰值振幅=0.707×1V=0.707V
最小信號通常為RMS噪聲,這是在未應用信號時測量的信號的均方根值。測量得到的RMS噪聲級別將取決于測量時使用的帶寬。每當帶寬翻倍,記錄的噪聲將增長1.41或3dB。
因此,一定要注意動態范圍數字始終與某個帶寬相關,而后者通常未被指定,這使記錄的值變得沒有意義。 器件的信噪比(SNR)和動態范圍多數時候被定義為同一個值,即: 動態范圍 = SNR = RMS滿量程/RMS噪聲 并且經常使用dB作為單位,即
動態范圍(dB) = SNR(dB) = 20*Log10 (RMS滿量程/RMS噪聲)
與使用RMS滿量程相反,一些制造商為了使圖表看上去更漂亮,引用零到峰或峰間值,這使得最終的動態范圍或SNR增加了3dB或9dB,因此我們需要仔細研究規范以避免誤解。
在討論ADC性能時,分辨率和精確度是經常被混用的兩個術語。一定要注意,分辨率并不能代表精確度,反之亦然。
ADC分辨率由數字化輸入信號時所使用的比特數決定。對于16位器件,總電壓范圍被表示為216 (65536)個獨立的數字值或輸出代碼。因此,系統可以測量的絕對最小電平表示為1比特,或ADC電壓范圍的1/65536。
A/D轉換器的精確度是指對于給定模擬輸入,實際數字輸出與理論預期數字輸出之間的接近度。換而言之,轉換器的精確度決定了數字輸出代碼中有多少個比特表示有關輸入信號的有用信息。
如前所述,對于16位ADC分辨率,由于出現內部或外部誤差源,實際的精確度可能遠小于分辨率。因此,舉例而言,一個給定的16位ADC可能只能提供12位的精確度。對于這種情況,4LSb(最低有效位)表示ADC中生成的隨機噪聲。
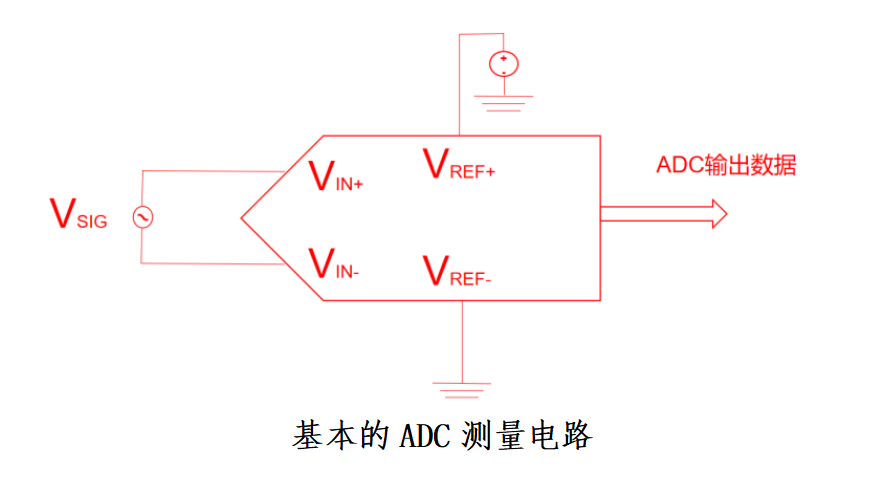
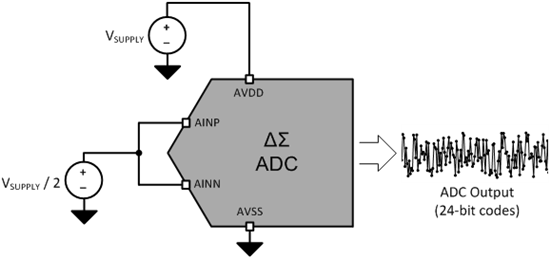
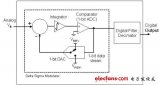
ADC動態范圍和ADC精確度通常指相同的內容。 圖 1 展示了基本的ADC測量電路。
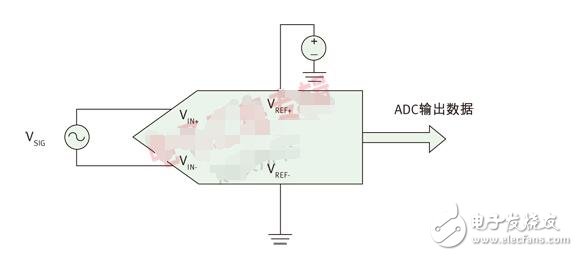
圖1:基本的ADC測量電路。
理想ADC生成一個數字輸出代碼,是關于模擬信號電壓和電壓參考輸入的方程,其中 輸出代碼 = 滿量程電壓 × [VIN+ - VIN-] / [VREF+ - VREF-] = 滿量程電壓 × [VIN /VREF]
每個數字輸出代碼表示參考電壓的一個小數值。
必須注意,ADC動態范圍應當匹配將要轉換的信號的最大振幅,這樣才能使ADC轉換精度最大化。 現在假設將要轉換的信號在0V到2.5V間變化,而VREF等于3.3V,如圖2所示。

圖2:輸入信號振幅和ADC動態范圍。
16位ADC將包括216 = 65536個步驟或轉換,且最低有效位(LSB)=VREF/65536=3.3V/65536=50.35uV。對于理想的ADC,所有代碼都具有1LSB的相同寬度。
如果ADC的最大信號值為2.5V,那么意味著總共有49652次轉換(2.5V/1LSB)。對于這種情況,將有15884次轉換未被使用(65536-49652=15884)。這反應了轉換后的信號精確度損失或ENOB損失(損失0.4位)。 如果ADC參考(VREF)和ADC最大信號電平之間的差異增加,那么ENOB損失或精確度損失將加劇。例如,如果ADC最大信號電平為1.2V且VREF=3.3V,那么ENOB損失將為1.5位。因此ADC動態范圍一定要匹配最大信號振幅,以獲得最高精確度。
應用示例
我們通過一些例子來說明這些參數在某些典型應用中的具體含義。
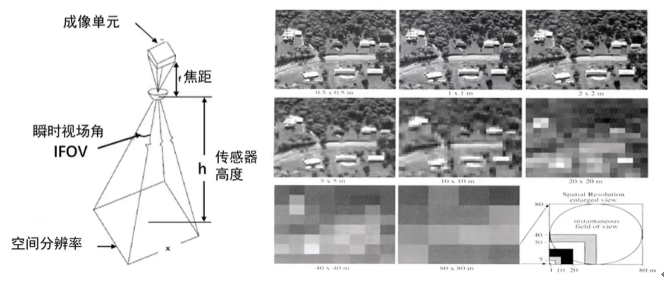
a) 數碼相機簡單來說,數碼相機的動態范圍就是圖像傳感器的一個像素生成的可檢測到的最亮和最暗值的范圍,使用比特作為單位。ADC的最小比特率(分辨率)由圖像傳感器的動態范圍(精確度)決定。舉例而言,如果傳感器的動態范圍為1000:1(也可以稱為60dB),那么ADC應當至少為10位(2^10=1,024分立電平) 才能避免信息損失。然而,在實際中,應當將ADC往高指定為12位,以允許ADC具有一定的容錯裕量。 只因為相機具有12位或16位的ADC就宣稱它具有12位動態范圍會令人誤解,因為噪聲以及用于產生這個動態范圍的像素井的容量沒有被考慮在內。
因此,綜上所述,只有傳感器本身具有足夠的動態范圍時上述描述才成立。色調范圍和動態范圍永遠也不會超過傳感器的動態范圍。因此必須要清楚相機的實際動態范圍。本節內容解釋了具有12位動態范圍的相機并不表示相機有一個12位的ADC。
b)電阻溫度計
電阻溫度計(RTD)利用了某些材料在不同溫度下電阻會發生可預測的變化這一原理。電阻溫度計通常使用鉑制成,并且具有以下特征: 0oC時的傳感器電阻=100ohm
電阻變化/ oC=0.385ohm(歐洲基本區間) 激活傳感器的感應電流=1mA 溫度范圍 = 0至500oC
注意,電阻溫度計需要通過大約1mA的弱電流來確定電阻。1°C的溫度變化會引起0.385 ohm的電阻變化,因此即使一個小的電阻測量錯誤也會引起很大的溫度測量誤差。
電阻溫度計需要檢測到0.1oC的溫度變化,這將成為系統在0至500 oC之間的LSB。電阻在這個范圍的對應變化幅度將為192.5ohm。對于這個變化幅度,該范圍下的電壓將為192.5mV。 現在,動態范圍 = 滿量程電壓/LSB大小 = 192.5mV/38.5uV = 5000
要滿足這一要求,13位ADC應當已經夠用。
注意,由于整個RTD傳感器的電壓范圍為100mV到292.5mV且LSB大小足夠低到可由任何SAR ADC分辨,您將需要一個增益放大器來在ADC可以實際支持的范圍內增大這個范圍。假設我們使用一個固定增益為17的增益放大器。通過使用這個增益放大器,電壓將從1.7V增加到4.92V。正如前面所解釋的一樣[如圖 2所示],在這個輸出電壓范圍內您的ADC將不能夠得到充分利用,因此將限制動態范圍。
由于我們在這個應用中最關心的是LSB大小(RTD傳感器應當能夠使用0.1oC的溫度變化進行響應),并且假設典型ADC具有5V的滿量程電壓,因此您將需要一個轉換器,其中 ENOB(有效位數) = 1.44ln(滿量程/LSB) =1.44ln(5V/38.5uV) ≈17位(近似值)
一個Δ ADC應當能夠提供這種性能。 注意,13位應用并不總是需要13位轉換器。
c) 電氣計量
如今,電表變得越來越復雜,并且要求在不同動態范圍下獲得高精確度,因為任何測量誤差都會使電力公司蒙受巨大的損失。
對于動態范圍為2000:1的Class1電表,必須測量的最小信號大約為0.5mV,假設ADC滿量程電壓為1V。 這種儀表的最大誤差規格通常為針對指定動態范圍測量的參數的0.1%。 目標錯誤=0.5mV×0.1% =500nV。
因此,要測量的最小信號為500nV。
系統需要從1V中解析出500nV,這將要求ADC具有1V/500nV≈2×106次輸出轉換。這需要使用具有21位ENOB的ADC。
需要注意的一點是通用21位ADC并不能滿足這些需求,除非它具備一個良好的噪聲層并能夠分辨最低500nV的電壓。
這個具體示例僅僅介紹了電表中的電壓測量需求。電表中的電流測量具有比電壓測量更嚴格的需求,但是本例并沒有介紹詳細內容。
結束語
模數轉換器(ADC)宣稱具有“n”位分辨率,這常常被誤解為精確度。分辨率和精確度完全是兩個概念,兩者不能混用。應該由具體的應用來確定是否允許丟失代碼以及所需ADC精確度。本文通過解釋一些應用示例展示了精確度和分辨率的差別。此外,ADC精確度不能僅僅取決于ADC性能和特性,它與圍繞ADC的整個應用設計有關。系統實際上指定了所需的真正動態范圍。












 工商網監
工商網監
評論