 電子發燒友App
電子發燒友App


嚴格來說,Linux 不是實時操作系統,但 Linux 卻支持實時調度算法。與通用調度算法(如完全公平調度算法)相比,實時調度算法更注重任務(進程)的實時性。為什么 Linux 支持實時調度算法,卻不是實時操作系統呢?有興趣的同學可以去網上查閱相關的文獻或者資料。
本文主要介紹 Linux 的 Deadline 實時調度算法。
什么是實時操作系統
實時操作系統能夠保證在一定時間限制內完成特定功能的操作系統。實時操作系統有硬實時和軟實時之分,硬實時要求在規定的時間內必須完成操作,這是在操作系統設計時保證的;軟實時則只要按照任務的優先級,盡可能快地完成操作即可。屬于硬實時操作系統的有 WinDriver 公司開發的 VxWorks 和 BlackBerry 公司的 QNX 等,而 Linux 則屬于軟實時操作系統。
Deadline 調度算法原理
我們先來介紹一下 Deadline 調度算法的原理。
實時系統除了要求在確定的時間期限內做出響應外,還要求在確定的時間期限內完成任務,這個確定的時間期限,我們稱之為 Deadline。如果系統未能在 Deadline 內完成任務,那么該系統就會產生錯誤。
Deadline 調度器定義了三個元素:
period:調度周期,即該任務需要被調度的周期時間。例如,地球圍繞太陽旋轉一周為一個周期,稱之為一年。
runtime:每周期內的運行時間,即該任務在該調度周期內至少能夠運行的時間。
deadline:每周期的截止時間,即該任務在一個調度周期內,必須在截止時間之前完成任務。在 Deadline 調度器中,deadline 可以與 period 相同,稱作 “implicit deadline”,deadline 也可以小于 period,稱作 “constrained deadline”。
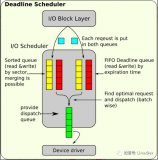
這三個元素的關系可以見下圖:
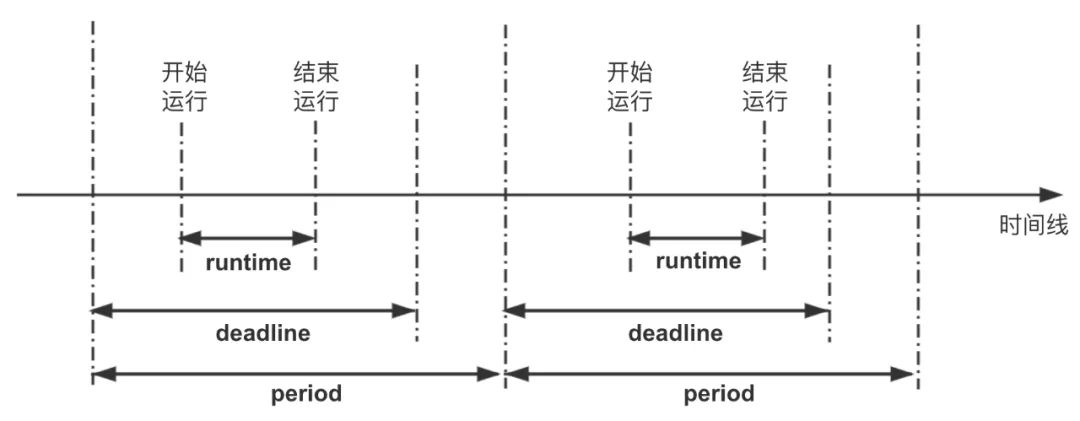
(圖1)
從上圖可以看出,三者之間的關系:runtime ≤ deadline ≤ period。
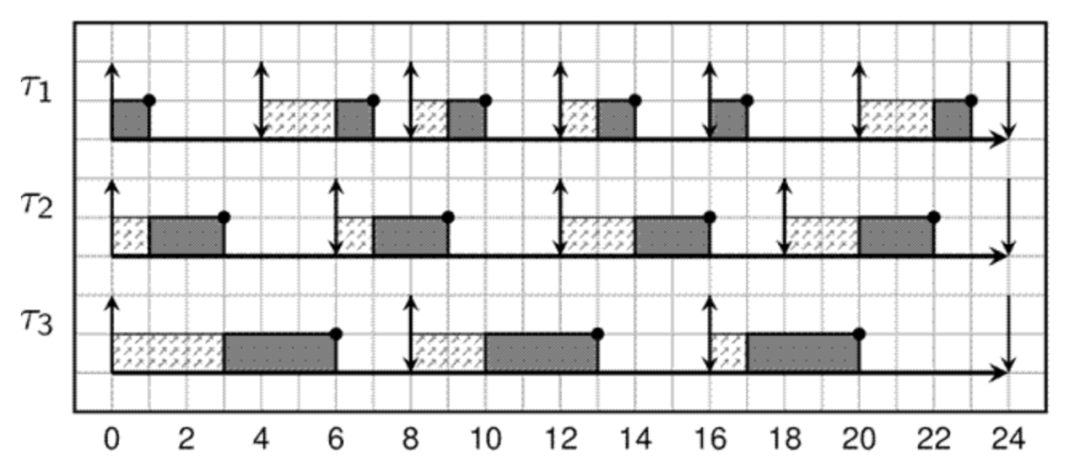
我們舉一個實際的例子,假設系統中有三個周期性任務。為了簡單起見,本例中的任務為之前面提到過的 “implicit deadline”,即 deadline 等于 period:
?
| Task | Runtime | Period |
|---|---|---|
| T1 | 1 | 4 |
| T2 | 2 | 6 |
| T3 | 3 | 8 |
?
如果三個任務都運行在同一個 CPU 上,那么 CPU 的利用率為(未達到100%):
CPU利用率 = 1/4 + 2/6 + 3/8 = 23/24
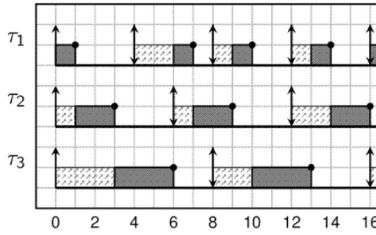
那么這三個任務的工作狀態可以如下圖所示:
(圖2)
通過上圖可知,三個任務都在 deadline 之前完成了各自的任務,周而復始。也就是說,當系統中所有任務的 CPU 利用率不超過 100% 時,Deadline 調度器能夠很好的滿足每個任務的需求。
Deadline 調度算法實現
1. 關鍵數據結構
在 Linux 內核中,每種調度器都會定義一個運行隊列來存儲系統中的任務(進程)。Deadline 調度器則通過?dl_rq?結構來描述這個運行隊列,其定義如下:
struct?dl_rq?{
????struct?rb_root?rb_root;??????//?紅黑樹根節點
????struct?rb_node?*rb_leftmost;?//?保存deadline最早到期的任務
????unsigned?long?dl_nr_running;?//?隊列中有多少個實時任務
????...
};
從?dl_rq?結構的定義可以看出,Deadline 調度器使用紅黑樹(紅黑樹是一種平衡二叉樹)來存儲系統中的實時任務,而紅黑樹的鍵則是任務的限期(deadline)。如下圖所示:
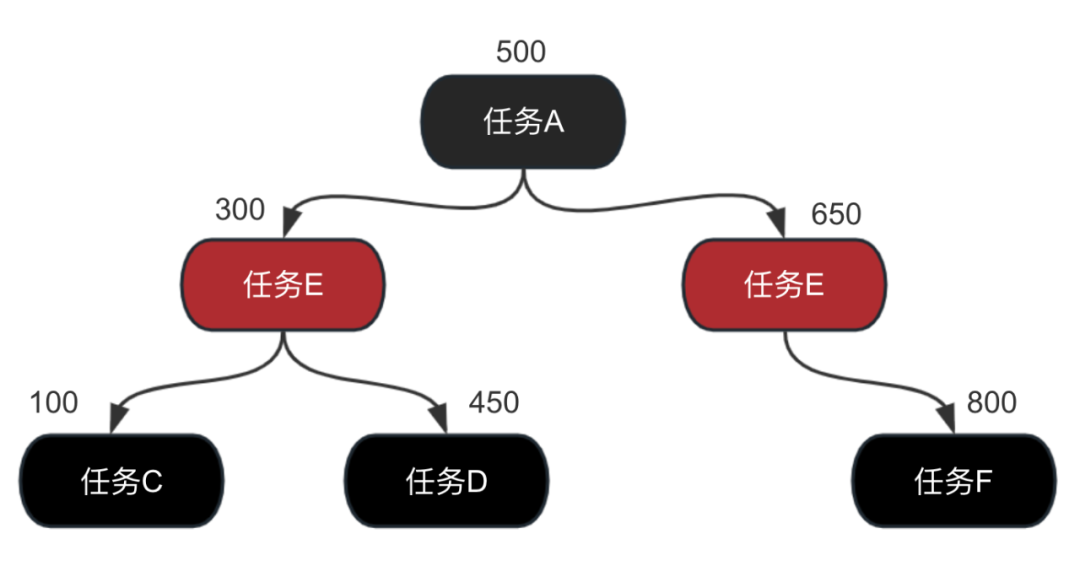
(圖3)
上圖中的數字就是任務的 deadline。
Linux 內核通過?sched_dl_entity?結構體來描述一個實時任務,其中的?deadline?字段則表示任務的 deadline。
我們來看看?sched_dl_entity?結構的定義:
struct?sched_dl_entity?{
????struct?rb_node?rb_node;??//?紅黑樹節點
????u64?dl_runtime;??????????//?任務能夠運行的時間
????u64?dl_deadline;?????????//?任務的相對限期
????u64?dl_period;???????????//?任務的調度周期
????u64?dl_bw;???????????????//?dl_runtime?/?dl_deadline
????s64?runtime;?????????????//?任務的剩余運行時間
????u64?deadline;????????????//?任務的絕對限期(dl_deadline加上當前時間)
????...
????struct?hrtimer?dl_timer;?//?高精度定時器,用來實現任務的周期調度
};
下面介紹一下?sched_dl_entity?結構各個字段的作用:
rb_node:紅黑樹節點,用來將任務添加到 Deadline 運行隊列中。
dl_runtime:任務能夠運行的時間。
dl_deadline:任務的相對限期。
dl_period:任務的調度周期。
runtime:任務的剩余運行時間。
deadline:任務的絕對限期(dl_deadline 字段加上當前時間)。
dl_timer:高精度定時器,用來實現任務的周期性調度。
2. 實現邏輯
Deadline 調度器實現了兩種調度算法:
EDF,Early deadline first。
CBS,Constant bindwidth server。
下面我們來介紹一下 EDF 算法的實現。
所謂EDF,即 deadline 最早到期的任務優先得到調度。在 EDF 算法實現中,調度器會通過紅黑樹來存儲系統中的實時任務,而紅黑樹的鍵就是任務的 deadline,如圖 3 所示。
Deadline 調度器通過調用?enqueue_dl_entity()?函數來將一個實時任務添加到運行隊列中,而?enqueue_dl_entity()?函數最終會調用?__enqueue_dl_entity()?函數來實現將任務添加到隊列中。
我們來看看?__enqueue_dl_entity()?函數的實現:
static?void?__enqueue_dl_entity(struct?sched_dl_entity?*dl_se)
{
????struct?dl_rq?*dl_rq?=?dl_rq_of_se(dl_se);
????struct?rb_node?**link?=?&dl_rq->rb_root.rb_node;
????struct?rb_node?*parent?=?NULL;
????struct?sched_dl_entity?*entry;
????int?leftmost?=?1;
????//?1.?通過任務的deadline,找到其在運行隊列紅黑樹中的位置
????while?(*link)?{
????????parent?=?*link;
????????entry?=?rb_entry(parent,?struct?sched_dl_entity,?rb_node);
????????if?(dl_time_before(dl_se->deadline,?entry->deadline))
????????????link?=?&parent->rb_left;
????????else?{
????????????link?=?&parent->rb_right;
????????????leftmost?=?0;
????????}
????}
????//?2.?如果當前任務是隊列中deadline最早到期的,那么緩存到運行隊列的rb_leftmost字段中
????if?(leftmost)
????????dl_rq->rb_leftmost?=?&dl_se->rb_node;
????//?3.?將任務添加到運行隊列的紅黑樹中
????rb_link_node(&dl_se->rb_node,?parent,?link);
????rb_insert_color(&dl_se->rb_node,?&dl_rq->rb_root);
????//?4.?增加運行隊列的任務數
????inc_dl_tasks(dl_se,?dl_rq);
}
從上面代碼可以看到,當把一個實時任務添加到運行隊列的紅黑樹中時,是根據該任務的 deadline 來找到其在紅黑樹中的相應位置,然后添加到運行隊列的紅黑樹中。任務添加成功后,會增加運行隊列的任務計數器。
當進行任務切換時,Deadline 調度器選擇紅黑樹最左面的節點進行調度,其通過?pick_next_task_dl()?函數來實現,代碼如下:
struct?task_struct?*
pick_next_task_dl(struct?rq?*rq,?struct?task_struct?*prev)
{
????struct?sched_dl_entity?*dl_se;
????struct?task_struct?*p;
????struct?dl_rq?*dl_rq;
????dl_rq?=?&rq->dl;
????...
????//?1.?找到?deadline?最早到期的調度實體
????dl_se?=?pick_next_dl_entity(rq,?dl_rq);
????//?2.?獲取改調度實體對應的任務
????p?=?dl_task_of(dl_se);
????...
????//?3.?返回?deadline?最早到期的任務
????return?p;
}
pick_next_task_dl()?函數通過取得運行隊列紅黑樹的最左邊的節點,并返回該節點上對應的任務。
那么 Deadline 調度器是怎么保證每個任務都能在其調度周期內執行呢?
每個任務都有一個高精度定時器(sched_dl_entity?結構的?dl_timer?字段),其超時時間為任務的調度周期。當定時器觸發時,便會調用?dl_task_timer()?函數來處理定時器事件。我們來看看?dl_task_timer()?函數的實現:
static?enum?hrtimer_restart?dl_task_timer(struct?hrtimer?*timer)
{
????struct?sched_dl_entity?*dl_se?=?container_of(timer,?struct?sched_dl_entity,?dl_timer);
????struct?task_struct?*p?=?dl_task_of(dl_se);
????...
????//?1.?將任務添加到運行隊列中
????enqueue_task_dl(rq,?p,?ENQUEUE_REPLENISH);
????if?(dl_task(rq->curr))?{
????????check_preempt_curr_dl(rq,?p,?0);
????}?else?{
????????//?2.?進行進程調度
????????resched_curr(rq);
????}
????...
}
dl_task_timer()?函數的主要完成以下兩個步驟:
將任務重新添加到 Deadline 調度器的運行隊列中。
進行進程調度(在中斷返回時)。
?
審核編輯:黃飛?













 工商網監
工商網監
評論