 電子發燒友App
電子發燒友App


摘要 TTCAN通過獨占窗口的方式解決消息傳送的確定性問題,提高總線利用率,試圖滿足應用發展的要求。但是在惡劣環境的高誤碼率下,傳送的可靠性下降,容錯的措施不成熟,成本較高。再考慮TTCAN的其他得失,認為它不是性價比高的CAN技術升級方案。
關鍵詞? CAN? TTCAN? 時間觸發協議? 誤碼率
2002年左右國外推出的TTCAN是一種時間觸發的通信協議,在我國電動汽車“863”攻關項目及地方的科研項目中有許多嘗試,目的是判斷它能否成為新一代汽車的通信骨干網絡。在研制中,它們一般規模較小,總線負載較輕,試驗環境并不十分惡劣,對誤碼造成的丟幀不容易發現,且未經長期考驗,所以沒有發現什么問題;但對于大量生產的汽車,必須全面認識TTCAN的優劣,以及汽車控制用總線的技術走向,才能避免采用新技術帶來的技術與經濟風險。本文試圖從可靠性與經濟性角度對TTCAN作些分析,供大家決策時參考。
1? TTCAN興起的推動力量
TTCAN是在CAN的基礎上發展起來的一種高層協議,它的出現是為解決CAN應用中遇到的瓶頸而作的一種試探。
現在,TTCAN已被采納為國際標準ISO118984;但在工業上也只是試驗性的應用,沒有見到大規模的采用。雖然如此,對它興起的原因進行分析仍然會對我們有很大的啟發,正是這些需求構成了評價一種新技術優劣的依據。CAN是最成功的一種現場總線,在今天依然是應用的主力,經過近20年的實踐,對它的局限也有了較多的認識[1]。這里不重復其中總結的內容,僅從應用的角度來說明CAN所面臨的問題。
1.1? 為滿足時限要求不得不降低總線利用率
CAN是事件觸發協議,當許多消息同時要求發送時,競爭結果使低優先級消息發送的時間推后很多,甚至不能滿足其時限的要求。
現以一個SAE benchmark為例[1]。該例有5條5 ms周期的消息,其幀長含1B、2B、1B、2B和4B數據,其余為50、100和1 000 ms的消息。在參考文獻[1]中,消息可能的最大長度計算小了,但即便這樣,對于5 ms周期的消息在125、250、500 kbps和1 Mbps的總線速率下,最大響應時間為4.456、2.228、1.114、0.557 ms。由于這些消息都置于較高優先級,它們只可能被一個低優先級4B數據消息阻斷1次。我們可以只算這幾條消息而估計相應總線的通信負載為75 kbps,對應的總線利用率為60%、30%、15%和7.5%。
現在看看最大響應時間對于應用意味著什么:一個閉環控制系統以5 ms為采樣控制周期,在最壞響應時間為4.456 ms時,執行器產生的反饋控制效果在下一次采樣前維持的時間最壞為5-4.456=0.55 ms,最長為5 ms。顯然在這種變動巨大的情況下,控制參數只能取得比較保守,例如微分和積分增益不能太強。這就極大地限制了控制品質的提高。有些控制算法對這種純遲后的變化更為敏感,例如smith預估,因此為了保證品質,只能取較低的總線利用率。對于以品質為第一的整車廠,這是唯一的選擇,而取較低的總線利用率意味著成本的提高。
1.2? 汽車廠是對成本非常敏感的企業
如果總線利用率只有20%~30%,隨著安全、節能與舒適性要求的提高,要增加更多消息而不希望增加成本。1條總線不夠,在技術上可再加,或者是連接2個ECU的專用總線,或者是連多個ECU的附加總線。要在2條CAN總線中加網橋,不要說復雜性的增加,成本的增加就很大。以一個網橋200元算,年產20萬臺車的廠家要增加4 000萬元成本。如果把總線利用率提高到60%,這錢就省下來了。
1.3? CAN的開發與應用成本較高
為了使低優先級消息發送時間減少,不得不修改消息的優先級分配,這種變化增加了維修、管理的成本。由于系統中消息量與種類的變化,消息的送達時間會變化,又增加了認證和驗證的工作量和成本。在開發新功能方面,也受到消息優先級設置上的相互影響,不易單獨推進。
1.4? CAN達不到線控技術的要求
線控技術可能簡化汽車的結構、降低成本、提高控制能力,是一個重要發展的方向。但要達到與原來機械—液壓系統同樣的可靠性,需要通信系統有更高的確定性與冗余度。CAN達不到這一確定性要求,所以要改進。當然,新的協議不能在性能上比CAN還差。
通過時間觸發協議,使消息在調度好的時間片內發送,可以消除總線的爭用,消息傳送的確定性得到了保證,總線的利用率也得到了提高。由于一部分消息不具有周期性質,需要提供合理的帶寬與時隙分布。TTCAN就在這種背景下出現了。幾乎同時出現的還有其他時間觸發協議,早一點的有TTP/C,晚一點的有FTTCAN、FlexRay等。它們都是在特定時隙指定周期性消息或事件消息的傳送,細節上雖有區別,但沒有根本的區別。與其他協議比較,TTCAN的優點是它用現有的CAN芯片就可以實現,因此價格便宜。這些經濟上的考慮是TTCAN出現的直接推動力量。
2? TTCAN的簡要內容
參考文獻[2]有TTCAN的詳細介紹。它的作者是TTCAN技術專利發明人、標準起草人。這里僅將它的幾個要點摘出:
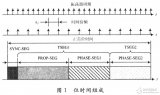
① TTCAN用System Matrix組織時間片。它相當于一個大周期,一個System Matrix里又分為2n個Cycle。在每個Cycle開始處,由時間上的Master節點發Reference消息,時間上的從節點對Reference進行同步,這樣就建立了全局時鐘。
② Cycle里可以劃分為若干長度不同的Slot(時隙),但每個Cycle的Slot劃分是一樣的。
③ Slot的用途有3種:Exclusive Window(獨占窗)、Arbitration Window(仲裁窗)和 Free Window(空窗)。Exclusive Window用于周期性消息發送,Arbitration Window用于事件消息的爭用,Free Window用來備用。
④ 禁止消息跨窗口的發送,只有相連續的Arbitration Window除外。為此,禁止CAN的出錯自動重發功能。在Arbitration Window內爭用的消息要先判斷能否發完,如能發完,才可參加爭用。
⑤ Slot用途的指定是由調度器來實現的,它不是標準的內容,然而事件消息在Arbitration Window的爭用并不是嚴格意義上的隨到隨爭用。按參考文獻[2]的想法,事件消息是偶發消息,應用程序可以預先安排幾個偶發消息到一個Arbitration Window,再任它們爭用。
⑥ 在一個Cycle里,Slot的用途不受約束。
3? TTCAN的缺點與問題
(1) TTCAN與CAN是不兼容的
TTCAN要求獨占窗,因此它不能和CAN混合使用在一個系統中。帶CAN通信口的ECU不受TTCAN的約束,可在任意時刻發送,就有可能在總線空閑時爭得發送權,使TTCAN的調度發送完全失效。汽車廠在采用TTCAN時必須將所有要用到的ECU都改為用TTCAN的方式,這就要重新認證和驗證所有的ECU,涉及大的工作量和投資。如果用網關將CAN的ECU過渡到TTCAN網,其成本的增加更大,只具有實驗意義。
(2) TTCAN在惡劣環境下誤幀太多
參考文獻[3]中, 用實驗方法得到CAN在惡劣環境下的誤碼率為2.6× 10-7。據文章作者認為,這是較為保守的估計,實際情況要好些。為了考察這個數據的有效性,我與該文作者進行了溝通,得到更為詳細的資料,見參考文獻[4]。根據這些資料,可以認為這個數據是一個與汽車現場接近的數據,不能算作保守。其主要理由有:
① 實驗的原始想法是只測來源于CAN電纜干擾的誤碼,所以把CAN發送和接收節點放在屏蔽箱內,用二條電纜傳送信號,一條在箱內,一條在箱外,通過比較從二條電纜收到的數據流,計算出誤碼率。但是將手機放在不帶屏蔽、不作雙絞的通信線上進行另外的實驗時,卻沒有任何出錯,說明來自空間的干擾影響很小。而實際惡劣環境下現場被測試設備的電源與干擾源的電源并不獨立。與此對比,認為出錯是通過電源傳導的,這與原始設想不同。
② 實驗的惡劣環境是指電焊機工作時的干擾,并無具體的數量指標,無法與汽車的電源傳導干擾相比較(ISO7637)。實際上可能不如汽車電源干擾大。
③ 在電源傳導干擾下,造成誤碼計數的情形較復雜。它與可能的故障位置、CAN收發節點狀態有關。誤碼有多算也有少算的情形。
④ 電焊機是人工操作,通信實驗中干擾源只在部分時間存在,計算誤碼率的通信總量多算了。
在此推定下,如假設TTCAN的總線利用率為60%,通信速率為500 kbps,按照2.6×10-7的誤碼率,那么在1小時內會有280.8個誤碼(500k×3 600×60%×2.6×10-7=280.8),約12.8秒1次。由于TTCAN禁止出錯自動重發,因此會大量丟幀。而對CAN來說,只要在12.8 s內重發成功,就不會丟幀。TTCAN要回避這個問題,就要求更完善的抗干擾措施,這意味著成本的提高。
(3) 由預留Error Frame幀引起的開銷大
TTCAN沒有禁止Error Frame,由于錯誤可能出現在任何時間,就可能發生在幀的最后處,每一個Slot都要預留Error Frame的時間,否則它會阻礙下一個Slot內消息的發送,這是很大的開銷,使TTCAN遠達不到設想的100%的總線利用率。假定最小的數據幀為1B數據,長為65位,而Error Frame為20位,那么這項開銷達到23.5%。
(4) Slot用途不同造成時間利用率低由
于TTCAN規定調度好的Cycle中的Slot劃分是一樣的,但可能的用途不同。不同的Cycle同一Slot里可能安排了長短不一的消息,此時對短幀來說,留下的時間就浪費了。
(5) 事件消息被阻塞的延遲可能性增大
在TTCAN中,由于調度結果造成幾個連續的Slot都是獨占窗,此時事件消息要等待的時間很長,必須有特別的設計加以處理。
(6) 網絡內的時間同步要求較高
用軟件來實現時就得留出時間以容許主從節點間的同步誤差,這就又減少了帶寬。如用Level 2的硬件實現,就不可能馬上使成本低到與CAN一樣。實際上,置TTCAN于一種新的與CAN無關的總線的地位,要與其他總線作全面的比較,TTCAN就沒有其他總線好了。
(7) 丟幀處理兩難
TTCAN在傳送出錯的情況下,不對本幀進行自動重發。在應用上要有所考慮。或者用比實際需要更多的發送,丟掉就算了的策略,這也會浪費帶寬;或者由應用層在仲裁窗組織重發,但這相當復雜。如用冗余的第2條總線,意味著成本的加倍。
(8) 仲裁窗的要求較難實現
在仲裁窗判斷事件消息能否發完,然后控制事件消息的發送是不容易實現的。用軟件來實時處理來不及,又沒有現成的硬件。
另外,在對付CAN系統中Babbling idiot出錯方面,TTCAN沒有改進。
4? 小結
工業應用中可靠性是第一位的要求,出錯自動重發是CAN最有價值的部分;而TTCAN禁止出錯重發,使它的抗干擾能力大打折扣,在應用上造成困難。在許多時間觸發協議中糾錯的方法都復雜得多,如TTP/C和FlexRay用2個通道傳送同樣的消息,只要不是2個通道同時出錯,消息就能送達,但是其代價是成本比單通道增加1倍。TTCAN也能構造2個通道,也會面臨同樣的代價問題;而且2個通道同時出錯仍是有概率的,要重發又有時限等新的問題。因此在抗干擾方面,TTCAN沒有給出性價比合適的解決方案。現在CAN每年都有數億的節點產量,這說明用戶對它的可靠性的認同,而這種可靠性完全來源于CAN在數據鏈路層實現的出錯自動重發功能——干擾是客觀存在的,自動糾錯使用戶根本感覺不到有錯。比較所有的現場總線,糾錯的方法要比CAN復雜得多,應用就不方便,性價比下降。盡管FlexRay的拓撲結構很多,有星型、總線型等,但設想用于替代CAN的只用1個通道的用法,可能會面臨TTCAN同樣的干擾丟幀問題;解決出錯重發的高層軟件并不成熟,也沒有標準化,因此目前不會構成對CAN的威脅。
TTCAN與CAN的不兼容,使它在經濟上不能充分利用CAN的資源,所以它也不是CAN的好的升級方案。
參考文獻
[1] ?Tindell K W, Burns A. Guaranteeing message latencies on Controller Area Network (CAN)[C]. In Proceedings of 1st International CAN Conference, pp. 111, September 1994.
[2] ?Fuhler T,et al. Time Triggered Communication on CAN[C]. Robert Bosch GmbH, Proceedings 7th International CAN Conference, Amsterdam, Holland, 2000.
[3]? Ferreira J,Oliveira A,Fonseca P,et al. An experiment to assess bit error rate in CAN[C]. RTN 2004? 3rd Int. Workshop on Real?Time Networks sattelite held in conjunction with the 16th Euromicro Intl Conference on Real?Time Systems, June 2004.
[4]? Ferreira J. PhDjjcf_Charpter_4.pdf
[5]? 楊福宇. CAN總線的局限[J]. 電子設計應用,2006(11):32, 34.
楊福宇(高級工程師),主要研究方向為工控、現場總線與汽車電子。Email: yfy812@163.com。
(收修改稿日期:2008-1-16)









 工商網監
工商網監
評論