 電子發燒友App
電子發燒友App


由于本人主要是搞軟件的,所以硬件方面不是很了解,但是為了更好地相互學習,僅此整理出一份總結出來,有什么錯誤的地方還請大家積極的指出!供大家一起參考研究!
我們做的智能小車,要想出色的完成一場比賽,需要出色的控制策略!就整個智能車這個系統而言,我們的被控對象無外乎舵機和電機兩個!通過對舵機的控制能夠讓我們的小車實時的糾正小車在賽道上的位置,完成轉向!當然那些和我一樣做平衡組的同學不必考慮舵機的問題!而電機是小車完成比賽的動力保障,同時平衡組的同學也需要通過對兩路電機的差速控制,來控制小車的方向!所以選一個好的電機驅動電路非常必要!
常用的電機驅動有兩種方式:一、采用集成電機驅動芯片;二、采用MOSFET和專用柵極驅動芯片自己搭。集成主要是飛思卡爾自己生產的33886芯片,還有就是L298芯片,其中298是個很好的芯片,其內部可以看成兩個H橋,可以同時驅動兩路電機,而且它也是我們驅動步進電機的一個良選!由于他們的驅動電流較小(33886最大5A持續工作,298最大2A持續工作),對于我們智能車來說不足以滿足,但是電子設計大賽的時候可能會用到!所以想要詳細了解他們的同學可以去查找他們的數據手冊!在此只是提供他們的電路圖,不作詳細介紹!
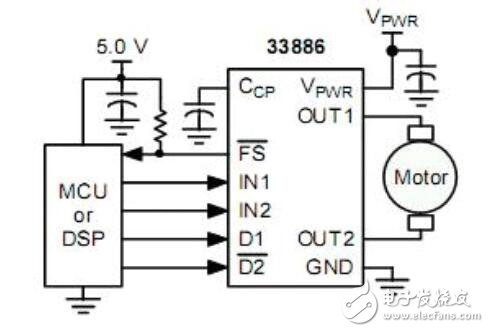
33886運用電路圖
下面著重介紹我們智能車可能使用的驅動電路。普遍使用的是英飛凌公司的半橋驅動芯片BTS7960搭成全橋驅動。其驅動電流約43A,而其升級產品BTS7970驅動電流能夠達到70幾安培!而且也有其可替代產品BTN7970,它的驅動電流最大也能達七十幾安!其內部結構基本相同如下:
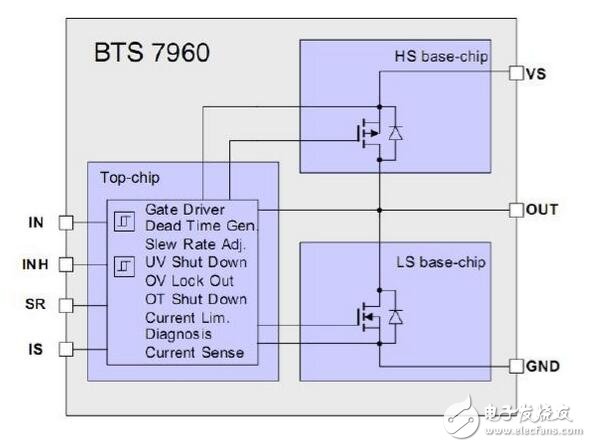
每片芯片的內部有兩個MOS管,當IN輸入高電平時上邊的MOS管導通,常稱為高邊MOS管,當IN輸入低電平時,下邊的MOS管導通,常稱為低邊MOS管;當INH為高電平時使能整個芯片,芯片工作;當INH為低電平時,芯片不工作。其典型運用電路圖如下圖所示:
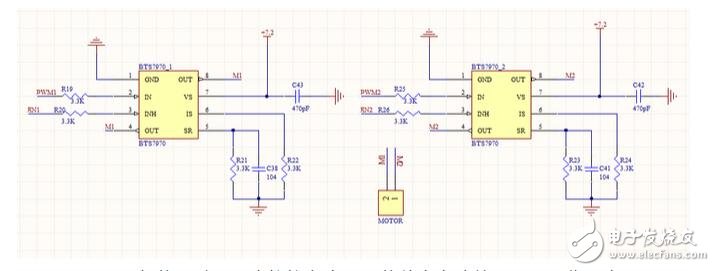
EN1和EN2一般使用時我們直接接高電平,使整個電路始終處于工作狀態!
下面就是怎么樣用該電路使得電機正反轉?假如當PWM1端輸入PWM波,PWM2端置0,電機正轉;那么當PWM1端為0,PWM2端輸入PWM波時電機將反轉!使用此方法需要兩路PWM信號來控制一個電機,光電平衡組的同學更是需要4路!有點浪費!其實可以只用一路PWM接PWM1端,另外PWM2端可以接在IO端口上,用于控制方向!假如PWM2=0;PWM1輸入信號時電機正轉,那么當PWM2=1是,PWM1輸入信號電機反轉(必須注意:此時PWM信號輸入的是其對應的負占空比)!
對于以上的電路,今年的電磁組A車和光電組D車來說,其驅動電流已經能夠滿足,但是對于今年的攝像頭組的B車模來說,可能有點吃力,B車的電機功率很大,雖然正常正轉時的電流不是很大,但是當我們加上我們的速度控制策略的時候,很多時候車子是在不停的加減速,這就需要電機不停的正反轉,此時的電流很大,還用以上的驅動電路,芯片會很燙!!這個時候就需要我們自己用MOSFET和柵極驅動芯片自己設計H橋!
首先以學校提供給大家實驗的驅動板上的電路圖來簡單介紹基本原理:

首先需要我們了解的是TC4427是一個1.5A雙通道高速的MOSFET驅動器,顧名思義,其內部有兩路同相驅動電路A和B。
上面的電路中4905是P溝道,3205是N溝道,大家都學過數電模電,即使沒有學過他們的導通條件也都應該了解!現假設PWM2=0,即Q2導通,Q4不導通!那么當PWM1=1時,Q1不導通,Q3導通,電流的方向為Q2—電機—Q3,電機正轉,當PWM1=0時,Q1導通,Q3不導通,即上橋臂導通,電機處于能耗制動狀態!
同理不難得出:當PWM1=0是,PWM2=1時,電機反轉;PWM2=0是下橋臂導通,電機處于能耗制動狀態!上面電路中的電阻電容R1和C1并聯接地,R2和C2并聯接地,主要作用是構成阻容濾波,濾除尖脈沖!有時為了進一步的擴大驅動電流,還常常兩兩并聯,用兩片3205并聯成一片,兩片4905并聯成一片!組成的H橋的驅動電路電流將更大!
其實TC4427只是兩路同相的驅動器,買過該芯片的同學可能知道,雖說不貴,但是也需要9塊錢左右,而且用過該芯片的同學也可能有體會,該芯片不是太好,有時會出現一個方向可以轉,另一個方向不可以轉的情況,我們是不是可以用其他既廉價又有同樣效果的芯片代替呢?其實我們可以想到的是我們常用的74LS00,沒錯,就是與非門,用它接成兩路同相的驅動器,該電路同樣好用,我所知道的隊伍中有人在用!
通過對上面電路的了解,大家應該大致了解了H橋的基本工作原理,有沒有更好地驅動電路了呢?答案是肯定的!以下是直流電動機的機械特性表達式:
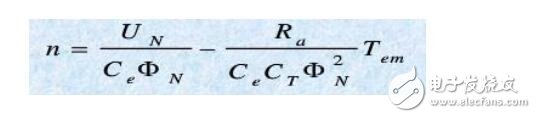
n是電機的轉速,NU是電機的兩端的電壓,eC、TC、Nφ對于我們來說可以看成一個定值,emT是負載轉矩,車做好之后該值基本確定不變,剩下一個重要的參數aR電機電樞回路的阻值,電機本身的內阻很小,如果外部引入的電阻過大,此時直流電動機轉速降落較大,驅動電路效率較低,電機性能不能充分發揮。為了提高電機的轉速我們應該盡量減小電機電樞回路繞組的阻值,我們知道:N溝道的MOSFET具有極低的導通電阻,IRF3205導通電阻在8m?左右,而IRF4905幾乎是其兩倍,那么是不是可以考慮全部使用N溝道的3205來搭我們的驅動電路呢,答案也是肯定的,只不過需要換一片柵極驅動芯片就行!
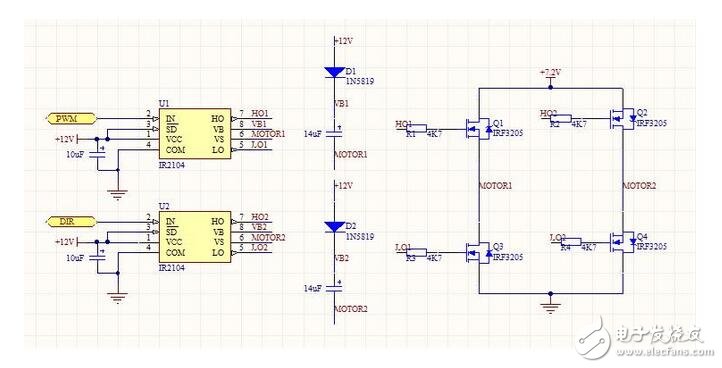
在這里給大家介紹的是IR公司的IR2104,因為IR公司號稱功率半導體領袖,當然2104也相對比較便宜!IR2104可以驅動可以驅動高端和低端兩個N溝道MOSFET,能提供較大的柵極驅動電流,并具有硬件死區、硬件防同臂導通等功能。使用兩片IR2104型半橋驅動芯片可以組成完整的直流電機H橋式驅動電路。但是需要12V驅動!
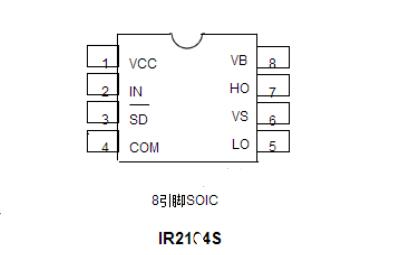
IR2104基本應用電路:
SD信號時一個使能信號,跟前面的BTS的INH信號輸入端類似,高電平有效,芯片工作,IN為高電平時HO為高,LO為低,IN為低電平時,HO為低,LO為高電平!
關于其中關鍵參數的選擇:

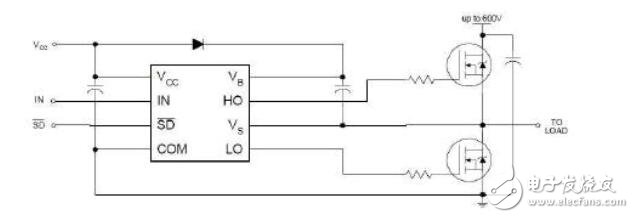
這個驅動設計單從信號邏輯上分析比較容易理解,但要深入的理解和更好的應用,就需要對電路做較深入的分析,對一些外圍元件的參數確定做理論分析計算。圖中IC是一個高壓驅動芯片,驅動1個半橋MOSFET。Vb,Vs為高壓端供電;Ho為高壓端驅動輸出;COM為低壓端驅動供電,Lo為低壓端驅動輸出;Vss為數字電路供電.此半橋電路的上下橋臂是交替導通的,每當下橋臂開通,上橋臂關斷時Vs腳的電位為下橋臂功率管Q2的飽和導通壓降,基本上接近地電位,此時Vcc通過自舉二極管D對自舉電容C2充電使其接近Vcc電壓。當Q2關斷時Vs端的電壓就會升高,由于電容兩端的電壓不能突變,因此Vb端的電平接近于Vs和Vcc端電壓之和,而Vb和Vs之間的電壓還是接近Vcc電壓。當Q2開通時,C2作為一個浮動的電壓源驅動Q2;而C2在Q2開通其間損失的電荷在下一個周期又會得到補充,這種自舉供電方式就是利用Vs端的電平在高低電平之間不停地擺動來實現的.由于自舉電路無需浮動電源,因此是最便宜的,如圖所示自舉電路給一只電容器充電,電容器上的電壓基于高端輸出晶體管源極電壓上下浮動。圖中的D和C2是IR2104在脈寬調制(PWM)應用時應嚴格挑選和設計的元器件,根據一定的規則進行計算分析;并在電路實驗時進行調整,使電路工作處于最佳狀態,其中D是一個重要的自舉器件,應能阻斷直流干線上的高壓,其承受的電流是柵極電荷與開關頻率之積,為了減少電荷損失,應選擇反向漏電流小的快恢復二極管,芯片內高壓部分的供電都來自圖中自舉電容C2上的電荷;為保證高壓部分電路有足夠的能量供給,應適當選取C2的大小。
供參考的電路,其中的參數參考北科大技術報告:
其工作的原理在此不在贅述僅提供其工作的真值表,如下:


IR2104比較便宜,有錢的同學可以再去研究研究TD340,基本原理都是大同小異!









 工商網監
工商網監
評論