針對玻璃配料過程的特點,設(shè)計了一種新型稱重控制器。控制器采用了數(shù)字信號處理器(DSP)TMS320F2812 作為控制核心,利用DSP運算能力強(qiáng)、片內(nèi)功能豐富的特點,簡化了電路設(shè)計,提高
2011-10-12 14:44:57 1726
1726 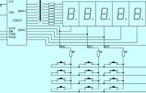
由于DSP將超強(qiáng)的高速實時處理能力和豐富的外設(shè)功能集于一身,目前,以DSP為核心的嵌入式運動控制器已經(jīng)成為開放式運動控制器的發(fā)展主流,并獲得廣泛的應(yīng)用。本文通過 對運動控制
2011-10-24 16:09:542606 
引擎快速查詢使用,全部暫存在內(nèi)存中的目的是為了在100ms完成競價過程,確保在DSP方《30ms處理完成,為網(wǎng)絡(luò)通訊流出時間。Bid投放引擎是典型的大集群模式用于響應(yīng)大并發(fā)的請求,且確保每個請求
2020-11-30 17:50:16
設(shè)備的界面顯示系統(tǒng)。 結(jié)論 本文作者創(chuàng)新點:以 DSP為核心處理器,利用 CPLD來進(jìn)行邏輯轉(zhuǎn)換和控制,實現(xiàn)高速CPU處理器和低速外設(shè)接口的時序匹配,同時采用了移植性能和可讀性能高的 C程序設(shè)計,無需
2019-05-23 05:01:01
和科研單位尚未見有自主知識產(chǎn)權(quán)的研究成果或產(chǎn)品出現(xiàn),本文討論了以DSP為核心構(gòu)建數(shù)字音頻處理系統(tǒng)時需注意的幾個問題,分析自行研制的以DSP56364為核心的吉他音效處理系統(tǒng).
2011-03-06 22:28:27
裝載模式→標(biāo)準(zhǔn)串行口裝載模式 →I/O口引導(dǎo)裝載模式的順序循環(huán)檢測,以決定執(zhí)行哪種啟動模式。對于以C5402為核心的數(shù)字信號處理系統(tǒng)來說,并行引導(dǎo)裝載模式被認(rèn)為是最適用的。因為HPI引導(dǎo)裝載模式、標(biāo)準(zhǔn)串行口
2018-11-28 14:42:34
1、概述:本文描述了一種以HT單片機(jī)為控制核心的步進(jìn)電機(jī)驅(qū)動方案。可以控制步進(jìn)電機(jī)的轉(zhuǎn)速及轉(zhuǎn)向。 2、簡介: 圖1為我公司已經(jīng)開發(fā)完成的成功案例的一個部分。產(chǎn)品采用帶模數(shù)轉(zhuǎn)換功能的HT單片機(jī)
2020-07-10 16:40:20
以人性化為本,以直觀的中文作為短信遙控指令和報警短信內(nèi)容,且用戶可自定義。1、GSM遠(yuǎn)程控制功能:可以通過短信遠(yuǎn)程控制電器的工作與否。2、查詢功能:可以發(fā)短信查詢某個電器的工作狀態(tài)。2、狀態(tài)改變返回
2010-01-28 14:31:18
,點擊是就行了; 接著就會彈出登陸窗口,提示“Login as:”輸入root 就OK了,無密碼的 出現(xiàn)這個字符串“root@beaglebone:~#”,終端模式遠(yuǎn)程控制就成功了! 如果以前學(xué)過
2014-10-22 18:19:51
信號等,經(jīng)調(diào)理電路后,使其各種信號的電平和幅值滿足DSP控制器的要求;DSP主控電路以TMS320C6748為核心處理器
2015-09-10 11:15:15
,完全滿足研發(fā)的硬件需求。硬件開發(fā)經(jīng)驗:曾采用DSP+ARM的方式開制作了六足機(jī)器人運動控制系統(tǒng),使機(jī)器人能夠?qū)崿F(xiàn)執(zhí)行轉(zhuǎn)彎、蔽障和遠(yuǎn)程遙控等各項功能。項目描述:1、開發(fā)板各模塊的硬件調(diào)試;2、編程實現(xiàn)
2015-07-24 17:18:31
采用STM32F103C8T6為主控芯片、TL718為通信核心,設(shè)計了一種基于北斗定位和OBD診斷技術(shù)的物流車輛遠(yuǎn)程狀態(tài)監(jiān)控車載終端,實現(xiàn)了對物流車輛的位置、發(fā)動機(jī)轉(zhuǎn)速、速度、故障碼等狀態(tài)信息的遠(yuǎn)程
2021-01-15 10:09:54
同步控制的大功率機(jī)載相控陣?yán)走_(dá)電源設(shè)計相控陣技術(shù)以其獨特功能,廣泛應(yīng)用于地面防御和海上防御各種雷達(dá)之中,發(fā)揮了重要作用,成為備受關(guān)注的雷達(dá)體制,如應(yīng)用于機(jī)載雷達(dá),也一定能使飛機(jī)的作戰(zhàn)性能得到更好
2009-12-10 16:39:51
和網(wǎng)絡(luò)技術(shù)的不斷發(fā)展,運動控制器已從以單片機(jī)和微處理器作為核心的運動控制器和以專用芯片(ASIC)作為核心處理器的運動控制器,發(fā)展到了基于PC機(jī)平臺的以數(shù)字信號處理器(DSP)和現(xiàn)場可編程門陣列
2019-09-04 07:10:42
和網(wǎng)絡(luò)技術(shù)的不斷發(fā)展,運動控制器已從以單片機(jī)和微處理器作為核心的運動控制器和以專用芯片(ASIC)作為核心處理器的運動控制器,發(fā)展到了基于PC機(jī)平臺的以數(shù)字信號處理器(DSP)和現(xiàn)場可編程門陣列
2019-08-30 08:27:17
1、引言 機(jī)載光電穩(wěn)瞄產(chǎn)品大量裝備于各種類型飛機(jī)上,其核心是陀螺穩(wěn)定平臺,主要作用在于隔離載體的角擾動,使安裝在載體上的光學(xué)傳感器的視軸在慣性空間內(nèi)保持穩(wěn)定,使光學(xué)傳感器得到清晰的圖像。穩(wěn)定
2020-08-27 07:43:00
為滿足對直流無刷伺服機(jī)構(gòu)的數(shù)字化控制,介紹了一種數(shù)字無刷直流電機(jī)伺服控制系統(tǒng),以TMS320F2812型DSP為控制核心,包括中央處理電路,驅(qū)動電路,反饋電路等實現(xiàn)對直流無刷電機(jī)伺服系統(tǒng)的控制。該系
2014-11-07 14:40:50
優(yōu)點,在伺服系統(tǒng)中應(yīng)用越來越廣泛。使用數(shù)字信號處理器(DSP)實現(xiàn)無刷直流電機(jī)的伺服系統(tǒng)可以只用一片DSP實現(xiàn)比較復(fù)雜的算法,控制精度高,可對伺服系統(tǒng)進(jìn)行更有效的控制。文中以TMS320F2812為
2012-08-08 09:29:57
設(shè)計技術(shù),研制高抗干擾性、低功耗移動終端SoC芯片,為數(shù)字對講機(jī)產(chǎn)業(yè)的快速發(fā)展提供技術(shù)保障。 其中DSP采用多級流水、多總線架構(gòu),具有尋址方式靈活、單周期MAC、硬件加速單元等特點;AD基于電荷域信號處理
2016-03-24 14:31:16
以數(shù)據(jù)報的形式在CPU的控制下通過公共通訊網(wǎng)發(fā)送回航標(biāo)監(jiān)控中心。同時,監(jiān)控中心也可以對航標(biāo)進(jìn)行遠(yuǎn)程遙控。這樣,就能使得當(dāng)代的航道建設(shè)趨于數(shù)字化、信息化。
2019-07-02 08:01:47
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于機(jī)載三軸伺服控制平臺的控制器進(jìn)行了設(shè)計與優(yōu)化。
2019-07-08 06:28:36
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于機(jī)載三軸伺服控制平臺的控制器進(jìn)行了設(shè)計與優(yōu)化。
2019-07-16 07:41:04
),利用短消息傳輸來實現(xiàn)遠(yuǎn)程數(shù)據(jù)采集系統(tǒng)的方案。全文由GPRS 業(yè)務(wù)的概述、遠(yuǎn)程數(shù)據(jù)采集系統(tǒng)的功能設(shè)計、數(shù)據(jù)采集終端的硬件設(shè)計、軟件的設(shè)計四部分組成。介紹了系統(tǒng)的發(fā)展背景、單片機(jī)技術(shù)、GSM/GPRS
2009-12-08 09:57:10
光電跟蹤系統(tǒng)在實戰(zhàn)環(huán)境中,針對復(fù)雜場景下快速運動目標(biāo)實施實時跟蹤的魯棒性與穩(wěn)定性,筆者提出以雙DSP和FP-GA為核心來構(gòu)建主從式超高速并行處理體系的設(shè)計思想,并研究開發(fā)了基于雙DSP的新型柔性機(jī)載實時
2019-07-02 06:57:27
本帖最后由 eehome 于 2013-1-5 10:02 編輯
基于嵌入式TCPIP的遠(yuǎn)程GPRS控制終端的設(shè)計與實現(xiàn)
2012-08-09 00:19:38
本帖最后由 eehome 于 2013-1-5 09:46 編輯
基于電話遠(yuǎn)程控制家電設(shè)備系統(tǒng)的設(shè)計電話遠(yuǎn)程控制系統(tǒng)以STC89C52RC單片機(jī)和MT8870雙音多頻解碼集成電路為核心,借助
2012-12-03 21:15:42
:給出了以兩片高性能TMS320C6414作為核心處理器,并輔以FPGA來實現(xiàn)系統(tǒng)邏輯時序控制,從而組成雙DSP柔性機(jī)載實時圖像處理系統(tǒng)的設(shè)計方案。同時對系統(tǒng)的硬件資源選擇及工作流程進(jìn)行了討論。&
2008-09-05 08:40:02
利用可見光成像與紅外成像傳感器實現(xiàn)實時目標(biāo)成像跟蹤是精確制導(dǎo)武器及機(jī)載成像光電系統(tǒng)研究的核心技術(shù)。伴隨著實戰(zhàn)環(huán)境日益復(fù)雜以及偽裝、隱身等目標(biāo)特性控制技術(shù)的飛速發(fā)展,機(jī)載實時圖像跟蹤系統(tǒng)的應(yīng)用也日益廣泛與深入。當(dāng)跟蹤目標(biāo)并非一般地面慢速目標(biāo),而是其它快速運動目標(biāo)?
2019-09-03 07:06:05
如何設(shè)計出一款遠(yuǎn)程開關(guān)實現(xiàn)對工業(yè)遠(yuǎn)程控制和智能家居遠(yuǎn)程控制?
2021-10-25 07:15:15
核心控制電路的主要功能是什么?如何通過應(yīng)用ReFLEX-XMODEM模塊實現(xiàn)遠(yuǎn)程安全控制功能?
2021-05-18 06:23:45
巨控PLC遠(yuǎn)程控制模塊有哪些功能?巨控PLC遠(yuǎn)程控制模塊有哪些應(yīng)用?
2021-09-27 06:26:45
本文以錄像機(jī)為目標(biāo),設(shè)計一個基于Internet/Intranet的錄像機(jī)遠(yuǎn)程控制系統(tǒng)。設(shè)計以MOTOROLA的8位微控制芯片為核心的控制器,通過RS232與基于PC機(jī)的Web服務(wù)器進(jìn)行通信。
2021-06-01 06:35:50
姓 名孟嘉磊摘 要隨著物聯(lián)網(wǎng)技術(shù)應(yīng)用到了樓宇自動化建設(shè)和工業(yè)現(xiàn)場控制之中,遠(yuǎn)程控制開關(guān)有著十分廣闊的應(yīng)用前景,因此物聯(lián)網(wǎng)開關(guān)成為了智慧樓宇的核心組成部分。在工業(yè)4.0的推動下,這就要求普通的開關(guān)不僅
2021-07-01 06:32:53
一.信息采集控制系統(tǒng)的設(shè)計思想在遠(yuǎn)程采集終端下設(shè)一個核心控制芯片,該核心控制芯片負(fù)責(zé)管理下面的多個信息采集點,信息采集點先將采集的信息發(fā)送到核心控制芯片,然后核心控制芯片以標(biāo)準(zhǔn)的電氣通訊模式,按一定
2011-12-23 16:36:55
核心控制模塊軟件設(shè)計 機(jī)載核心控制模塊軟件運行流程如圖2所示,軟件采用C語言編程實現(xiàn)各項功能。以STC89C52單片機(jī)為控制核心主要實現(xiàn)控制溫濕度采集與處理、數(shù)碼管顯示、鍵盤輸入、對溫濕度調(diào)節(jié)系統(tǒng)進(jìn)行
2018-11-13 16:12:51
著名的MIT Cheetah Mini四足機(jī)器人開源了所有軟硬件,包括機(jī)載電腦和關(guān)節(jié)驅(qū)動器的軟硬件全部開源。這一篇就根據(jù)開源的驅(qū)動控制軟件及相關(guān)論文,探索其核心控制算法框架。
2021-09-07 08:19:52
產(chǎn)生隨時間變化的電壓。其開關(guān)頻率范圍一般為10-20 KHz,以消除噪聲。這一通用電機(jī)的控制方法可以獲得更佳的電流控制和更佳的EMI性能,因此,效率更高。 本文相關(guān)文章1? 電機(jī)控制之常用算法概述(1)2?電機(jī)控制之常用算法概述(2)3?電機(jī)控制之常用算法概述(3)
2018-10-26 11:00:57
藍(lán)牙核心技術(shù)概述(一):藍(lán)牙概述藍(lán)牙核心技術(shù)概述(二):藍(lán)牙使用場景藍(lán)牙核心技術(shù)概述(三): 藍(lán)牙協(xié)議規(guī)范(射頻、基帶鏈路控制、鏈路管理)藍(lán)牙核心技術(shù)概述(四):藍(lán)牙協(xié)議規(guī)范(HCI、L2CAP
2014-11-24 16:06:30
設(shè)計以DSP和FPGA為控制核心的控制板:PCBhttps://item.taobao.com/item.htm?spm=a1z10.1-c.w4004-22878000120.6.3dc6a116vkdxyP&id=619896868979
2020-08-04 19:21:51
本帖最后由 一只耳朵怪 于 2018-6-1 15:43 編輯
怎么實現(xiàn)cc2530終端節(jié)點 的遠(yuǎn)程控制復(fù)位?因為項目要求終端節(jié)點是在高壓環(huán)境下比較危險不能手動復(fù)位,所以想實現(xiàn)遠(yuǎn)程控制進(jìn)行復(fù)位
2018-06-01 12:55:58
控制電路1.遠(yuǎn)程控制概述切換開/關(guān)和靜噪開/關(guān)都可以遠(yuǎn)程控制。為此,要用到許多控制功能,如并行、REM總線(串聯(lián))和帶內(nèi)控制等,這些不同的功能可以由X71、X108和X73上的跳線位置來選擇確定
2021-09-15 06:15:18
你好,我正在用PIC32做遠(yuǎn)程控制。為此,我使用引腳的中斷動作。當(dāng)一個引腳(當(dāng)遠(yuǎn)程按下)發(fā)生從高到低的轉(zhuǎn)換時,我跳到中斷服務(wù)例程。在中斷服務(wù)例程中,我禁用該引腳的中斷動作。然后連續(xù)讀取來自wh的數(shù)據(jù)
2019-10-16 10:48:28
關(guān)鍵詞:水泵遠(yuǎn)程控制器 遠(yuǎn)程控制水泵 短信遠(yuǎn)程控制水泵 水泵遠(yuǎn)程控制終端 手機(jī)控制水泵 水泵遠(yuǎn)程控制系統(tǒng) 水泵水塔自動控制系統(tǒng) 水位無線自動控制系統(tǒng) GSM遠(yuǎn)程控制水泵 水泵
2022-02-14 09:31:31
多DSP構(gòu)成的機(jī)載雷達(dá)數(shù)字信號處理分系統(tǒng)在寬溫條件下進(jìn)行開關(guān)測試,具有測試時間長、開關(guān)次數(shù)多、現(xiàn)場噪音大的特點,需要進(jìn)行遠(yuǎn)程自動控制。基于標(biāo)準(zhǔn)工控繼電器輸出模塊和AT
2009-03-13 11:20:44 34
34 介紹了一種以MCS-51系列單片機(jī)為核心,具有現(xiàn)場控制、遠(yuǎn)程控制和遠(yuǎn)程報警功能的智能測控器。該儀器通過現(xiàn)場的鍵盤、PC, 機(jī)以及遠(yuǎn)程的電話等三種控制方式來控制室內(nèi)多路用電設(shè)
2009-03-17 14:23:4724 提出一種視頻檢測和遠(yuǎn)程控制的嵌入式設(shè)計方法,解決了采用具有高性能的數(shù)據(jù)處理功能的DSP 作為視頻檢測處理器的設(shè)計問題; 同時, 提出在嵌入式操作系統(tǒng)中通信平臺的設(shè)計方
2009-04-16 11:04:5915 提出一種視頻檢測和遠(yuǎn)程控制的嵌入式設(shè)計方法,解決了采用具有高性能的數(shù)據(jù)處理功能的DSP 作為視頻檢測處理器的設(shè)計問題; 同時, 提出在嵌入式操作系統(tǒng)中通信平臺的設(shè)計方
2009-05-14 15:54:1118 機(jī)載SAR(airborne Synthetic Aperture Radar,合成孔徑雷達(dá))中,用三軸穩(wěn)定平臺隔離載機(jī)的姿態(tài)變化及機(jī)械振動來穩(wěn)定天線波束指向是關(guān)鍵的運動補(bǔ)償技術(shù)之一。本文提出用TMS320LF2407 DSP
2009-06-23 13:07:1622 設(shè)計了基于雙DSP 結(jié)構(gòu)的捷聯(lián)控制與解算系統(tǒng),該系統(tǒng)以高性能的浮點處理器TMS320VC33 作為捷聯(lián)系統(tǒng)實時解算的核心,以TMS320VC5402 作為通道控制、數(shù)據(jù)采集的控制核心,并結(jié)合FPGA
2009-08-04 15:44:587 分析了某機(jī)載短波電臺的控制接口需求,根據(jù)其控制接口特點,提出了利用單片機(jī)為核心設(shè)計該機(jī)載短波電臺檢測控制器的研制方案,介紹了該檢測控制器的硬件組成框圖和軟件
2009-08-14 08:10:2718 遠(yuǎn)程供水測控終端系統(tǒng)的設(shè)計:介紹了一種新型的鐵路沿線供水遠(yuǎn)程測控系統(tǒng)設(shè)計方案,可以對供水站點設(shè)備進(jìn)行遠(yuǎn)程監(jiān)測,同時還可對設(shè)備進(jìn)行控制。詳細(xì)設(shè)計了遠(yuǎn)程測控終端系統(tǒng)
2009-08-24 18:25:5019 以SPCE061A 單片機(jī)為控制核心,設(shè)計了基于公共電話網(wǎng)絡(luò)的智能家用遠(yuǎn)程控制儀,介紹了控制儀的工作原理及系統(tǒng)構(gòu)成,給出了部分硬件電路圖和軟件結(jié)構(gòu)。控制儀可以遠(yuǎn)程的對家
2009-09-24 15:21:4325 DSP控制器及其應(yīng)用:DSP控制器是一款針對于工業(yè)控制而開發(fā)的DSP芯片,是一款32位的高性能單片機(jī)。本書首先概述DSP控制器的發(fā)展過程及其特點,接著介紹DSP控制器的總體結(jié)構(gòu),特
2009-10-09 15:43:2926 介紹了一種通過狀態(tài)的數(shù)字瞬時反饋,利用微處理器的高速數(shù)值計算功能實現(xiàn)逆變器的全數(shù)字化控制的無差拍算法以及利用 TI 的最新 DSP(TMS320F240)實現(xiàn)無差拍控制的方法及控制流程。
2009-11-27 15:35:3839 機(jī)載光電穩(wěn)瞄穩(wěn)定控制算法除了經(jīng)典控制還有各種先進(jìn)的控制算法,如:最優(yōu)控制、變結(jié)構(gòu)控制、神經(jīng)網(wǎng)絡(luò)及模糊控制等。從目前的文獻(xiàn)資料來看,這些先進(jìn)的算法大都限于仿真研
2009-12-04 11:56:5211 本文介紹了在DSP 上實現(xiàn)基于μC /OS 的遠(yuǎn)程溫度控制系統(tǒng)的設(shè)計。用戶可以通過網(wǎng)絡(luò)中任一PC 機(jī)的瀏覽器界面實現(xiàn)對溫度的實時遠(yuǎn)程控制。
2010-01-25 14:32:0637 基于RTW 的DSP 控制系統(tǒng)研究
摘要 提出了一種基于RTW的TMS320F2812 DSP數(shù)字控制系統(tǒng),基于模型的設(shè)計流程,實現(xiàn)了工程開發(fā)過程從算法設(shè)計到最終實現(xiàn)的所有開發(fā)階
2010-04-07 10:18:1737 摘要:闡述了個人通信終端通過DTMF的通信方式遠(yuǎn)程控制校園無線廣播系統(tǒng)的原理,并介紹了其硬件和軟件的設(shè)計方法。關(guān)鍵詞:遠(yuǎn)程控制;通信終端;無線廣播
2010-05-29 11:29:2958 提出了一種以ARM微處理器為控制核心的遠(yuǎn)程無線視頻監(jiān)控終端的設(shè)計方案,其監(jiān)控終端的硬件設(shè)計包括視頻采集處理、中央管理控制、無線傳輸3個模塊。并給出了監(jiān)控終端的軟件開
2010-11-22 16:25:16157 DSP控制器是一款針對于工業(yè)控制而開發(fā)的DSP芯片,是一款32位的高性能單片機(jī)。本書首先概述DSP控制器的發(fā)展過程及其特點,接著介紹DSP控制器的總體結(jié)構(gòu),特別說明DSP控制器多組
2010-12-13 12:52:4766 機(jī)載光電穩(wěn)瞄穩(wěn)定控制算法除了經(jīng)典控制還有各種先進(jìn)的控制算法,如:最優(yōu)控制、變結(jié)構(gòu)控制、神經(jīng)網(wǎng)絡(luò)及模糊控制等。從目前的文獻(xiàn)資料來看,這些先進(jìn)的算法大都限于
2009-03-11 12:11:00523 以DSP為核心的控制結(jié)構(gòu)框圖
以DSP為核心的控制結(jié)構(gòu)框圖
控制電路以DS
2009-07-17 08:25:333614 
通道控制設(shè)計的雙余度DSP解決方案
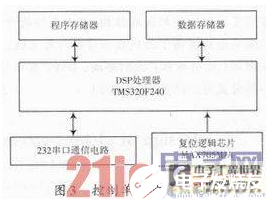
具有自動控制功能的電子設(shè)備已廣泛應(yīng)用于我國多型機(jī)上,用于飛機(jī)上各機(jī)載設(shè)備的控制、調(diào)節(jié)等功能。如圖1所示,其控制系統(tǒng)主要
2010-05-27 10:02:29874 
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于
2010-09-24 08:56:181099 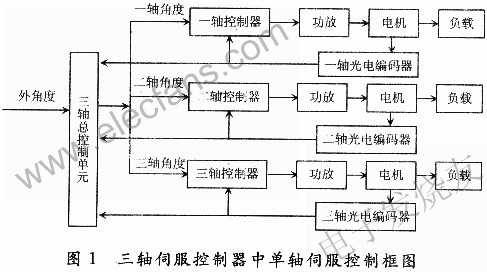
內(nèi)容簡介 DSP的應(yīng)用范圍已日益廣泛,許多用MCU的領(lǐng)域也積極地更新?lián)Q代為DSP。DSP控制器是一種適合于控制系統(tǒng)的DSP芯片。本教材以TMS320C24x為模型介紹其結(jié)構(gòu)、指令系統(tǒng)及應(yīng)用;書中介紹了DSP的開發(fā)流程和開發(fā)環(huán)境,提供實驗內(nèi)容,帶領(lǐng)讀者進(jìn)入一個完整的學(xué)習(xí)
2011-02-27 14:51:35115 介紹了一種直升機(jī)載 雷達(dá)發(fā)射機(jī) 控制檢測電路的設(shè)計,提出了一個用于直升機(jī)載雷達(dá)的可行方案。首先敘述了引起發(fā)射機(jī)故障的主要因素以及每個故障的
2011-08-01 15:38:4268 DSP控制模塊是SVC控制器的核心。介紹了一種基于TMS320F28335的SVC控制模塊,給出了該系統(tǒng)的硬件電路,并介紹了系統(tǒng)的軟件設(shè)計與實現(xiàn)。該系統(tǒng)結(jié)構(gòu)簡單,操作方便,通過現(xiàn)場試驗,改模
2011-10-25 16:12:3384 首先,針對機(jī)載光電跟蹤控制系統(tǒng)的特點,建立了被控對象的模型。接著,對機(jī)載光電跟蹤系統(tǒng)模糊PID控制器的設(shè)計進(jìn)行了詳細(xì)介紹。最后,利用經(jīng)典PID控制、模糊控制、模糊PID控制3種
2012-02-16 17:05:0542 文中針對傳統(tǒng)的井下照明系統(tǒng)存在的弊端,設(shè)計了一種基于ARM單片機(jī)載波照明控制器。該控制器以ARM單片機(jī)為控制核心,以電力線載波通信芯片SC1128為基礎(chǔ),輔以外圍接口電路設(shè)計,實
2012-10-26 14:29:0769 設(shè)計了一種基于DSP與FPGA的運動控制器。該控制器以DSP為控制核心,用FPGA構(gòu)建運動控制器與傳感器以及電機(jī)驅(qū)動器的接口電路。充分發(fā)揮了DSP強(qiáng)大的運算能力和FPGA的并行處理能力。具有
2012-10-26 15:21:5193 根據(jù)某機(jī)載電臺的離線檢測控制需求,設(shè)計了以PC-104為核心,并擴(kuò)展1553B總線接口卡、數(shù)字IO、AD接口卡的硬件電路,編制了軟件流程,完成了系統(tǒng)的調(diào)試與試用。結(jié)果表明,該檢測控制
2013-06-25 16:46:3926 一種基于DSP_FPGA的輔助逆變器核心控制系統(tǒng)_吳瑕杰
2017-01-08 11:44:060 DDR2SDRAM控制器在機(jī)載顯控系統(tǒng)中的應(yīng)用_孫少偉
2017-03-19 11:26:541 1 運動控制器硬件結(jié)構(gòu) 本運動控制器的硬件結(jié)構(gòu)主要分為如下幾個模塊:DSP+CPLD 主控模塊,包括 DSP 核心 模塊和 CPLD 驅(qū)動與擴(kuò)展模塊;通信接口模塊,包括 PCI 總線、USB 總線
2017-11-03 10:30:472 水泵遠(yuǎn)程控制器是一款基于SMS短信技術(shù)開發(fā)的水泵控制系統(tǒng)。通過本系統(tǒng)用戶可以在電腦終端上面控制多個水泵的啟停、查詢各個水泵的工作參數(shù)包括工作電流電壓等。系統(tǒng)包括終端控制軟件和各個控制器構(gòu)成。
2017-12-07 17:30:2617 本文的主要內(nèi)容利用的是Excel DSP兼容的第三方算法來對數(shù)字電機(jī)控制的詳細(xì)資料概述
2018-05-07 16:42:465 RTU英文全稱Remote Terminal Unit,中文全稱為遠(yuǎn)程終端控制系統(tǒng),負(fù)責(zé)對現(xiàn)場信號、工業(yè)設(shè)備的監(jiān)測和控制。RTU遙測終端機(jī)主要是由微處理器來進(jìn)行控制,并且能夠支持網(wǎng)絡(luò)系統(tǒng)的進(jìn)行,能夠?qū)崿F(xiàn)企業(yè)對遠(yuǎn)程工作現(xiàn)場的遙控、遙測、遙信以及遙調(diào)的目的。
2020-01-09 07:52:006546 本文檔的主要內(nèi)容詳細(xì)介紹的是電腦遠(yuǎn)程控制實用工具可遠(yuǎn)程控制,放送元件,演示等功能概述
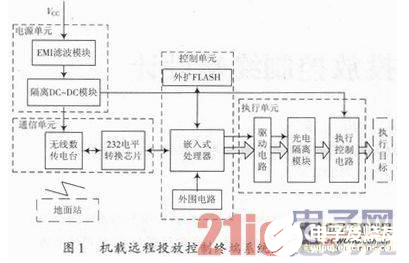
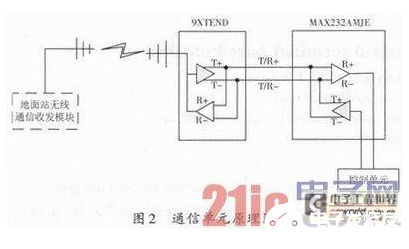
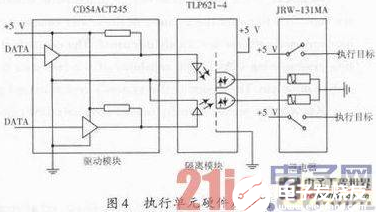
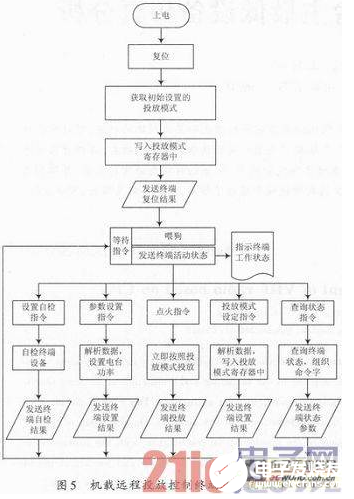
2018-09-03 08:00:008 導(dǎo)彈研制過程中為考核其抗干擾性指標(biāo),需要在靶機(jī)上加裝紅外干擾源的投放裝置,在靶機(jī)起飛后的特定時間段內(nèi),按一定的投放序列完成紅外干擾彈的投放,在靶機(jī)周圍形成與靶機(jī)紅外輻射特征相似的紅外輻射源,對導(dǎo)彈進(jìn)行干擾。
2020-01-31 09:51:00881 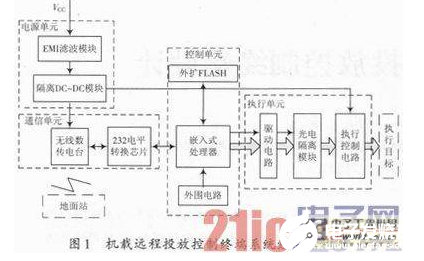
研究了基于MIL—STD一1553B協(xié)議遠(yuǎn)程終端的FPGA硬件設(shè)計方法。給出了設(shè)計原理和實現(xiàn)流程,硬件結(jié)構(gòu)主要由接口管理模塊、位流控制模塊、寄存器和內(nèi)存管理模塊、編碼器和解碼器組成,通過位流控制模塊
2021-02-03 15:21:3310 智能控制器是智能終端設(shè)備的“大腦”。智能控制器一般以MCU芯片(微控制器)或DSP芯片(數(shù)字信號處理器)為核心,加以外圍數(shù)字電子線路,按照不同的要求置入計算機(jī)軟件程序,是集成通訊技術(shù)、傳感技術(shù)、自動控制技術(shù)、微電子技術(shù)等多種技術(shù)而成的核心控制部件。
2021-03-29 15:49:005746 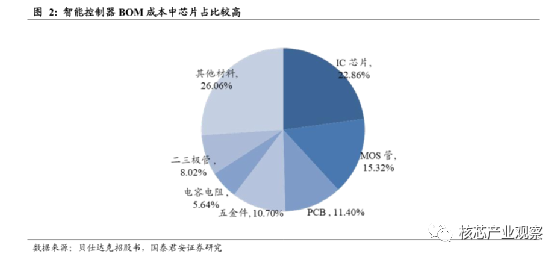
伺服系統(tǒng)本質(zhì)上就是一種隨動系統(tǒng),本文介紹的伺服系統(tǒng)為一維伺服轉(zhuǎn)臺,用于控制一種機(jī)載天線實時跟隨另一種瞄
2021-04-08 16:29:213265 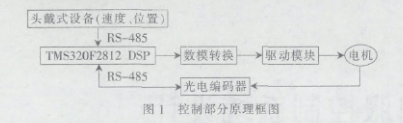
基于FPGA和DSP的機(jī)載圖形顯示系統(tǒng)
2021-06-08 10:48:0836 一種新型的機(jī)載雷達(dá)穩(wěn)定平臺自抗擾控制方案
2021-06-23 10:54:2413 姓 名 孟嘉磊摘 要隨著物聯(lián)網(wǎng)技術(shù)應(yīng)用到了樓宇自動化建設(shè)和工業(yè)現(xiàn)場控制之中,遠(yuǎn)程控制開關(guān)有著十分廣闊的應(yīng)用前景,因此物聯(lián)網(wǎng)開關(guān)成為了智慧樓宇的核心組成部分。在工業(yè)4.0的推動下,這就要求普通
2021-10-22 18:21:0417 四路遠(yuǎn)程控制開關(guān):又稱遠(yuǎn)程四路控制開關(guān)、多路遠(yuǎn)程控制開關(guān)。1臺四路遠(yuǎn)程控制開關(guān)等于4臺單路遠(yuǎn)程控制開關(guān),可同時控制4臺設(shè)備進(jìn)行不同的開關(guān)操作。四路開關(guān)獨立工作,每路互不影響。
2022-09-17 16:41:551183 概述經(jīng)緯恒潤深耕車載智能網(wǎng)聯(lián)技術(shù),著重車載智能終端產(chǎn)品的研發(fā)和生產(chǎn),4G-TBOX是當(dāng)前批量供貨的車載前裝配套產(chǎn)品。作為車聯(lián)網(wǎng)核心部件,4G-TBOX產(chǎn)品基于4G蜂窩通訊、GNSS衛(wèi)星定位和車輛
2022-02-10 09:32:55718 
目前伺服控制器的設(shè)計多以DSP或MCU為控制核心,但DSP的靈活性不如FPGA,且在某些環(huán)境比較惡劣的條件如高溫高壓下DSP的應(yīng)用效果會大打折扣,因此以FPGA為控制核心,對應(yīng)用于機(jī)載三軸伺服控制平臺的控制器進(jìn)行了設(shè)計與優(yōu)化。
2023-09-04 16:53:01331 遙測終端機(jī)RTU對設(shè)備進(jìn)行遠(yuǎn)程監(jiān)測和控制,支持采集和傳輸數(shù)據(jù),以實現(xiàn)對工業(yè)過程、公用事業(yè)、水文和環(huán)境的監(jiān)測和管理。遙測終端機(jī)RTU工作原理計訊物聯(lián)遙測終端機(jī)RTU通過網(wǎng)口、串口進(jìn)行傳感器/設(shè)備等現(xiàn)場
2023-12-08 15:09:00213 
在現(xiàn)代工業(yè)自動化領(lǐng)域,遠(yuǎn)程控制技術(shù)越來越受到關(guān)注。遠(yuǎn)程控制已成為提高效率、降低成本的關(guān)鍵手段,信捷PLC(可編程邏輯控制器)作為工業(yè)控制的核心設(shè)備,實現(xiàn)其遠(yuǎn)程控制具有重要意義。信捷plc遠(yuǎn)程控制
2024-02-22 16:02:27187 
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論