 電子發(fā)燒友App
電子發(fā)燒友App


無論是看技術(shù)發(fā)展趨勢,還是看市場發(fā)展前景,行泊一體域控制器無疑已成為自動駕駛領(lǐng)域新的競爭焦點。
1)技術(shù)發(fā)展趨勢維度
從EE架構(gòu)的發(fā)展趨勢來看,集中式域控架構(gòu)是傳統(tǒng)分布式架構(gòu)向前演進的必然結(jié)果。行泊一體方案作為智能駕駛域控的技術(shù)方案,已經(jīng)得到業(yè)界充分的認(rèn)可。
行泊一體域控方案相比于過去行車和泊車功能相互分離的開發(fā)模式,具備硬件綜合成本低、軟件配置靈活、傳感器數(shù)據(jù)可共用等優(yōu)勢。因此,是否搭載行泊一體方案已成為衡量各主機廠上市車型智駕競爭力水平的重要參考指標(biāo)之一。各大主機廠都在加快推進行泊一體方案的規(guī)模化量產(chǎn)進程,以期占據(jù)更多的主動權(quán)。
2)市場發(fā)展前景維度
據(jù)高工智能汽車研究院監(jiān)測數(shù)據(jù)顯示,2022年1-9月中國市場(不含進出口)同時前裝標(biāo)配搭載行車+泊車功能的乘用車上險量為105.69萬輛,接下來前裝搭載“行泊一體”域控制器的乘用車數(shù)量將會同步迎來大規(guī)模增長。
據(jù)市場反饋,在今年下半年,國內(nèi)有多家的行泊一體方案將陸續(xù)實現(xiàn)量產(chǎn)交付。據(jù)相關(guān)數(shù)據(jù)顯示:從2023年開始,行泊一體方案的新車前裝搭載量將快速進入上升通道,前裝同時搭載行車+泊車功能的乘用車上險量有望突破300萬輛,其中,行泊一體域控方案占比將超過60%。
隨著國內(nèi)汽車智能駕駛功能滲透率的不斷上升,整合芯片和核心算法的行泊一體域控制器將成為自動駕駛系統(tǒng)價值鏈上的關(guān)鍵部分和產(chǎn)業(yè)鏈上的利潤集中點。
盡管行泊一體域控制器如此重要,各自動駕駛方案商對要不要自研域控制器的態(tài)度卻不盡相同:通常,具備硬件背景的公司對自研域控制器的態(tài)度較為積極,而具備軟件算法背景的公司則更傾向于專注于自己擅長的軟件算法,去服務(wù)于域控制器廠商或者主機廠。
當(dāng)然,以軟件算法創(chuàng)新能力切入賽道的科技公司,也在積極拓展業(yè)務(wù)邊界,加速軟硬融合的腳步。如禾多科技就選擇自研了域控制器HoloArk,并在今年獲得了奇瑞等頭部廠商的定點,即將在明年量產(chǎn)裝車。
那么,禾多科技為什么會選擇自研域控制器?自研域控制器的底氣又來自哪里?自研域控制器的進展如何?如何克服域控制器在商業(yè)化落地過程中面臨的問題?帶著這些疑惑,筆者與禾多科技禾多科技域控平臺高級總監(jiān)于英俊、禾多科技高級產(chǎn)品總監(jiān)毛濤進行了深入的交流,希望能夠找到一些答案。
1. 禾多科技為什么會選擇自研域控制器? ? ? ?
域控制器是一個載體,對于自動駕駛方案商而言,有了這個載體才有可能獲得更多數(shù)據(jù)的使用權(quán),進而把軟件算法迭代得更好。
? 1.1 ? ? 有助于獲取更多數(shù)據(jù)的使用權(quán),“反哺”算法迭代
對于禾多科技而言,為主機廠商提供自研的域控制器,既能更好地發(fā)揮算法的作用與主線性,更重要的是將會獲取更多數(shù)據(jù)的使用權(quán),進一步反哺自身研發(fā),加速算法迭代。
此外,相比于單獨賣軟件,自研域控制器能夠讓主機廠與自動駕駛方案商在合作方式上有更多的選擇—— 禾多科技不僅可以為主機廠單獨提供軟件方案,同時也可以為主機廠提供軟硬一體方案。這樣有利于禾多科技獲得跟更多客戶合作的機會,讓更多的車用他們的軟件算法,進而獲得更多數(shù)據(jù)的使用權(quán)。
1.2 ? ? 有助于更好地形成功能體驗上的差異化優(yōu)勢
目前業(yè)內(nèi)都在談“軟件定義汽車”,但現(xiàn)實情況是:行泊一體域控制器的軟件相對標(biāo)準(zhǔn)化,差異化主要體現(xiàn)硬件上。
“雖然軟件定義汽車,但是硬件決定軟件。因為隨著場景數(shù)據(jù)的不斷迭代,各家上層功能算法的性能越來越趨一,很難做差異化,要把功能體驗的差異化做出來,硬件是一個重要支點,自研域控制器有助于禾多科技在硬件層面以及軟硬結(jié)合的整體性能上帶來更好的用戶體驗。”禾多科技域控平臺高級總監(jiān)于英俊解釋道。
1.3 ? ? 有助于實現(xiàn)更好的用戶體驗
相比于單獨做軟件算法,自研域控制器有助于禾多科技從系統(tǒng)設(shè)計層面更好地去打通行車、泊車的各個系統(tǒng),用從而給戶提供盡可能統(tǒng)一的交互方式和連貫的智駕體驗,讓用戶更少花時間去調(diào)用功能,最大程度地提升自動駕駛功能的使用體驗。
因此,除了自研域控硬件外,禾多科技還專門打造了駕艙一體人機交互系統(tǒng)。其中駕艙明星產(chǎn)品 CID One(Center Information Display One)以響應(yīng)式模塊交互、主動化智駕建議、全場景數(shù)字孿生等功能定義人車共駕,為消費者創(chuàng)造安心便捷的自動駕駛體驗。
CID One設(shè)計理念:
行泊一體-“One”智駕:打通行泊功能,提供連貫、流暢的智駕體驗。
智駕一張圖-“One”地圖:融合SD地圖和HD地圖,形成全局導(dǎo)航規(guī)劃和道路結(jié)構(gòu)清晰的“一張圖”;
智駕一張嘴-“One”語音:統(tǒng)一智駕、導(dǎo)航和座艙前裝語音,用“一張嘴”式智能語音提供連貫交互;
組件適配-“One”規(guī)范:運用統(tǒng)一的視覺元素和組件規(guī)范,形成一致的交互場景呈現(xiàn)。
2.?禾多科技自研域控制器的底氣來自哪里?
智能駕駛域控制器已經(jīng)成為各自動駕駛公司競爭的焦點,具備硬件背景的自動駕駛方案公司大都也在研發(fā)域控制器。相比于他們,算法背景的禾多科技自研域控制器的底氣又來自哪里呢?
2.1 ? ? 軟硬件融合能力
對于行泊一體域控制器方案而言,軟件和硬件的搭配非常重要,直接影響到算力的釋放和算法的發(fā)揮,并最終影響到系統(tǒng)的性能表現(xiàn)。
為了充分發(fā)揮域控制器中芯片的算力效能,禾多科技堅持以“軟硬一體”的思路,實現(xiàn)軟件算法和硬件算力的深度耦合。于英俊舉例說:“在做域控設(shè)計時,我們會充分考慮各芯片異構(gòu)核性能,模型適配度,并結(jié)合禾多自身的技術(shù)優(yōu)勢去做芯片選型和硬件設(shè)計。比如我們在做硬件方案設(shè)計時,會選擇技術(shù)復(fù)用度高,具備成熟工具鏈與生態(tài)的芯片,結(jié)合禾多在多傳感器融合和規(guī)控方面的算法優(yōu)勢一起考慮進去。”
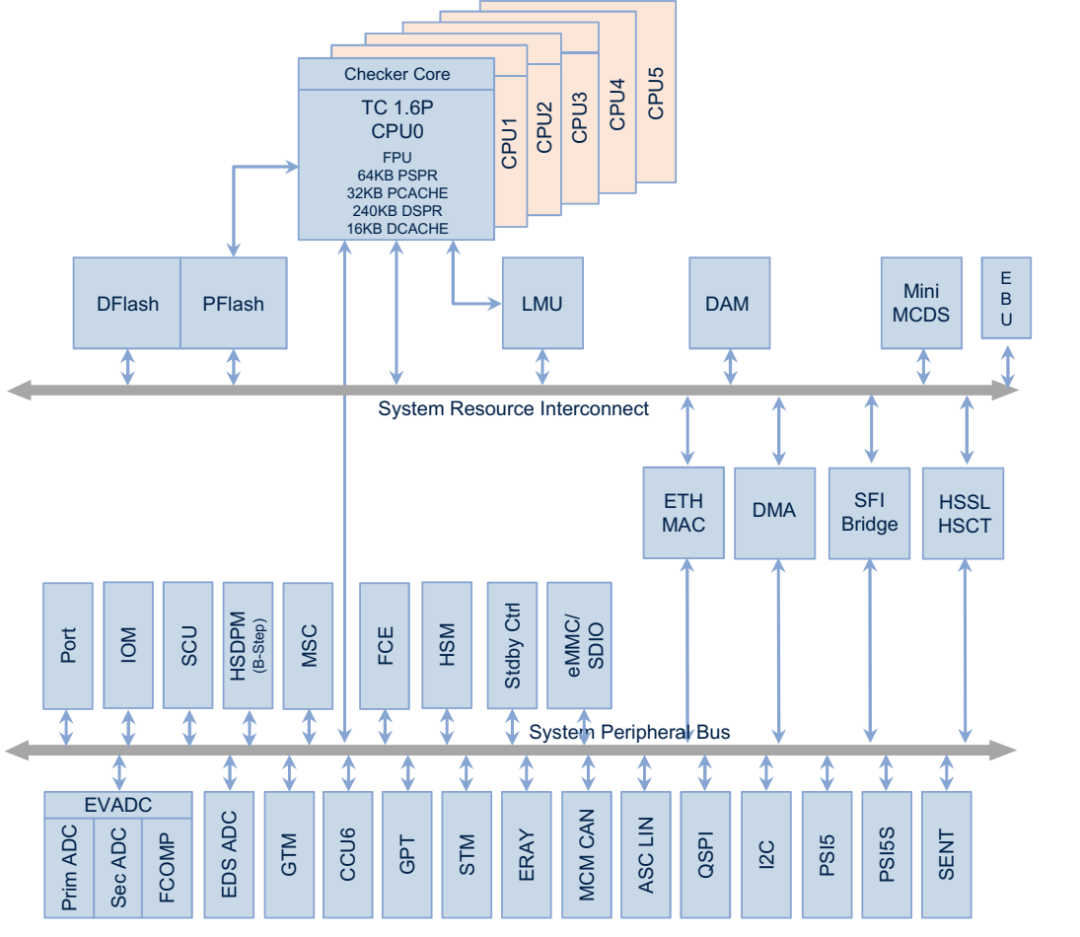
△軟件算法和硬件算力深度耦合的案例
另外,禾多科技通過自研中間件來充分發(fā)揮域控制器硬件的性能。
為什么都有專門的供應(yīng)商去做中間件了,禾多還要自研中間件呢?于英俊認(rèn)為:“商業(yè)化的軟件可定制性較差,不能滿足不同客戶的差異化需求,其次工具鏈費用及人力維護成本較高,會加大項目的整體成本。禾多自研的中間件會結(jié)合上層功能算法的需求,以及參考AUTOSAR官方的標(biāo)準(zhǔn)需求,開發(fā)了一套能夠滿足Adaptive AUTOSAR標(biāo)準(zhǔn)及SOA架構(gòu)的自動駕駛中間件。"
“最近這兩年業(yè)內(nèi)一直在強調(diào)‘軟硬解耦’的概念,但是在真正的量產(chǎn)項目里,中間件如何在嵌入式平臺里做好,如何把 CPU以及RAM這些硬件資源優(yōu)化到極致,把軟件算法及芯片異構(gòu)核的算力性能充分發(fā)揮出來,還是需要跟硬件資源深度綁定。”

△禾多科技HoloSAR Designer工具
2.2 ? ? 系統(tǒng)優(yōu)化能力
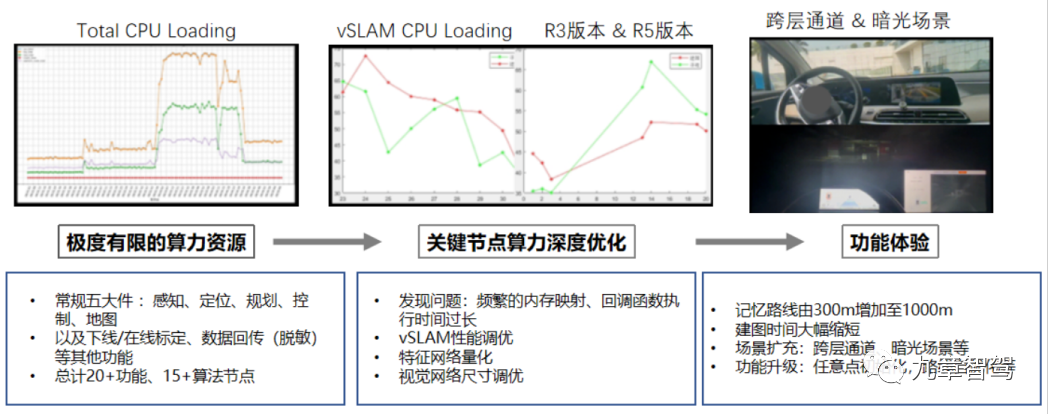
對于中低算力平臺而言,如何以有限的算力處理眾多傳感器輸入的海量數(shù)據(jù),完成相應(yīng)的感知任務(wù),一直是個技術(shù)難題。一些量產(chǎn)車型上甚至?xí)霈F(xiàn)由于芯片算力不足,關(guān)閉部分?jǐn)z像頭或者是降低性能指標(biāo)來保障主體功能的情況。那么,HoloARK 1.0 是如何以18TOPS的AI算力去處理10顆高清攝像頭的圖像數(shù)據(jù),并保證所有相關(guān)功能的正常運轉(zhuǎn)呢?
禾多科技通過對功能顆粒度進行細(xì)化、算法優(yōu)化以及通訊協(xié)議棧的優(yōu)化來充分發(fā)揮域控中各芯片算力的有效利用率,進而保證相關(guān)功能的正常運行。
1)功能顆粒度的細(xì)化 ?
在功能部署方面,根據(jù)各芯片的物理特性對不同核進行不同的任務(wù)分配。于英俊舉了一個比較細(xì)節(jié)的例子,他說:“感知會涉及到做前處理和后處理,以往前處理的一些工作都是在 CPU 里面去做,現(xiàn)在我們把前后處理的一些工作放到DSP去完成。再比如,泊車涉及 V -SLAM定位,以前在MDC610平臺上這個功能是放到CPU-A72核去實現(xiàn),現(xiàn)在在TDA4平臺上,V-SLAM移到 C66的DSP 上去完成。”
2)軟件算法的優(yōu)化
禾多科技對底層軟件進行了很多的創(chuàng)新,于英俊舉例說:“操作系統(tǒng)宏內(nèi)核的模塊有很多,如果加載太多會影響系統(tǒng)的啟動時間。我們通過優(yōu)化底層操作系統(tǒng) —— 把一些非關(guān)鍵或者對實時性要求不高的模塊,從內(nèi)核態(tài)挪到用戶態(tài),實現(xiàn)了系統(tǒng)的兩秒快速啟動。
“在算子庫的編輯方面,我們一般不會用芯片自帶的算子庫,因為那些計算的編輯方式是芯片加載的、通用的,性能不一定好。我們在做Kernel編輯的時候,會做更多的優(yōu)化。比如,原先TDA4 VM 里的Kernel計算是用 int 8 矩陣計算,我們通過優(yōu)化可以做到浮點類型16 位的Kernel編輯,這樣便能夠加快芯片對上層功能算法的處理速度。”
另外,據(jù)禾多科技高級產(chǎn)品總監(jiān)毛濤透露,之前用于感知的一些神經(jīng)網(wǎng)絡(luò)模型,因為網(wǎng)絡(luò)模型尺寸太大了,只能跑在大算力平臺上。針對這個問題,禾多科技通過對一些特征網(wǎng)絡(luò)進行裁剪,去掉一些不必要的部分,同時精簡和合并一些節(jié)點,在算法層面把一些子功能進行合并等。通過一系列的優(yōu)化措施,最終使得感知網(wǎng)絡(luò)模型能夠跑在現(xiàn)在的中低算力平臺上。
3)通信協(xié)議棧的優(yōu)化
于英俊說:“以往底層通信中DDS的CPU的占有率都會達(dá)到30%,通過優(yōu)化,我們把CPU的占有率控制在10% ,主要是優(yōu)化協(xié)議棧本身,及底層通信方式,支持虛擬以太網(wǎng),Zero-Copy;”
“同時,在域控制器里我們構(gòu)建松耦合、易擴展的通信軟件架構(gòu),引入DDS-TSN全域通信的概念,即在SOC和MCU芯片內(nèi)都會部署DDS融合TSN的協(xié)議,設(shè)定Qos策略及配置參數(shù),實現(xiàn)上層全功能節(jié)點的核間和片間確定性通信。”
2.3 ? ? 高效的數(shù)據(jù)閉環(huán)通路
于英俊告訴九章智駕:“禾多科技在做域控制器開發(fā)的時候主要考慮到了兩點 —— 一是滿足客戶需求,推動其盡快量產(chǎn)落地;二是滿足自身的數(shù)據(jù)閉環(huán)能力需求。”
那么,在域控制器方面,禾多做了哪些工作使其能夠很好地滿足數(shù)據(jù)閉環(huán)能力的需求?于英俊講述了以下兩個細(xì)節(jié):
1)時間同步
做數(shù)據(jù)采集需要有統(tǒng)一的時間基準(zhǔn),禾多在自己的域控制器上會維護兩套時間:一個是域內(nèi)的滿足自動駕駛功能需求的數(shù)據(jù)面時間,這個時間是不允許有跳變;另外一個是跨域傳輸?shù)墓芾砻鏁r間,主要負(fù)責(zé)數(shù)據(jù)及日志上云等需求。
另外關(guān)于多路相機的同步曝光,禾多域控可以把同步曝光的誤差控制在5微秒以內(nèi)。
注:數(shù)據(jù)面時間=系統(tǒng)時間=晶振時間(不能跳變)
管理面時間=UTC時間≈整車時間(可接受跳變)
2)數(shù)據(jù)記錄與回放
禾多科技自研的數(shù)據(jù)存儲工具HoloBag,其Record模塊能夠部署到域控制器內(nèi)多個芯片中,支持多個傳感器的同步錄制,包括:相機、Radar、Lidar等傳感器數(shù)據(jù),也提供H.264/265視頻流無損壓縮,降低硬件存儲空間的占用。上位機REPLAY回放工具,支持多路相機視頻的H.264/265解碼,以及CAN消息的轉(zhuǎn)換。
另外,禾多科技為應(yīng)對以后其自動駕駛系統(tǒng)量產(chǎn)裝車上路后回傳的海量數(shù)據(jù)的處理需求,做好了以下準(zhǔn)備工作:
打通端到端的自動駕駛數(shù)據(jù)處理閉環(huán)鏈路,覆蓋數(shù)據(jù)采集、回傳、挖掘、存儲、預(yù)處理、標(biāo)注、系統(tǒng)迭代(包括模型訓(xùn)練,眾包地圖等)、測試驗證、軟件部署發(fā)布等完整開發(fā)流程。
大數(shù)據(jù)閉環(huán)架構(gòu)與配套工具鏈能從研發(fā)測試車和量產(chǎn)車回傳數(shù)據(jù)中進行快速有效的大數(shù)據(jù)挖掘,建設(shè)場景庫,解決長尾Corner Case。在數(shù)據(jù)來源上,基于量產(chǎn)數(shù)據(jù)+真值數(shù)據(jù)+仿真數(shù)據(jù)多元數(shù)據(jù)來源,逐步形成完善的場景庫和測試集。在數(shù)據(jù)處理層面,禾多科技打造了統(tǒng)一的數(shù)據(jù)管理平臺,數(shù)據(jù)標(biāo)簽適配OpenX標(biāo)準(zhǔn),與各類項目管理和故障管理工具打通。
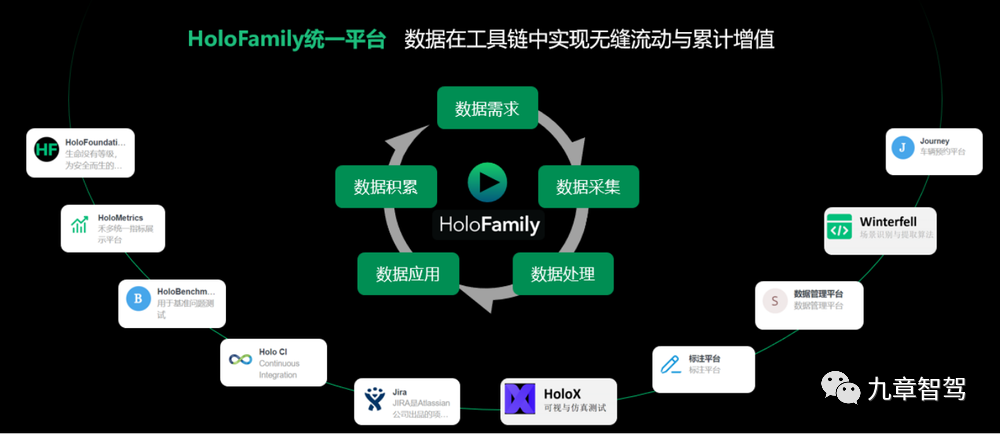
△禾多科技數(shù)據(jù)閉環(huán)架構(gòu)與工具鏈1.0
2.4 ? ? 具備良好的合作生態(tài)
行泊一體方案的量產(chǎn)落地離不開產(chǎn)業(yè)鏈上下游生態(tài)伙伴的緊密協(xié)作。對于產(chǎn)業(yè)鏈上游,禾多科技正與地平線、德州儀器、RTI等軟硬件廠商緊密合作,研發(fā)自動駕駛域控相關(guān)創(chuàng)新技術(shù)。于英俊說:“我們一直秉承開放的心態(tài)與芯片及軟件公司建立溝通及合作渠道,同時結(jié)合禾多的功能算法在硬件上的運行狀態(tài),在域控硬件的方案設(shè)計上會跟幾家芯片廠家進行深度的合作,也會根據(jù)芯片的升級來迭代自己的域控產(chǎn)品。對于一些潛在的芯片合作伙伴,禾多也會通過軟件賦能的形式,幫助其搭建上層應(yīng)用生態(tài)。”
對于產(chǎn)業(yè)鏈下游,禾多科技去年已經(jīng)與廣汽集團達(dá)成了“產(chǎn)融聯(lián)合”式深度合作關(guān)系,將為廣汽多款量產(chǎn)車型提供自動駕駛解決方案;同時,目前禾多科技也正與多家國內(nèi)頭部主機廠緊密協(xié)作,推動行泊一體域控方案在更多品牌的乘用車型上量產(chǎn) 。
3.?禾多科技自研域控制器的進展如何?
3.1 ? ? HoloArk基本信息梳理
HoloArk是禾多科技基于地平線征程系列芯片和德州儀器TDA4系列芯片打造的行泊一體域控制器。HoloArk 1.0~3.0分別提供18TOPS、288TOPS和500+TOPS三種不同級別的算力,可適配不同傳感器的融合方案,進而為主機廠提供適合不同自動駕駛級別、不同性價比的方案。
截止目前,HoloArk已獲得奇瑞等多家頭部主機廠客戶的定點,并預(yù)計HoloArk1.0和HoloArk2.0域控方案在2023年實現(xiàn)量產(chǎn)裝車。
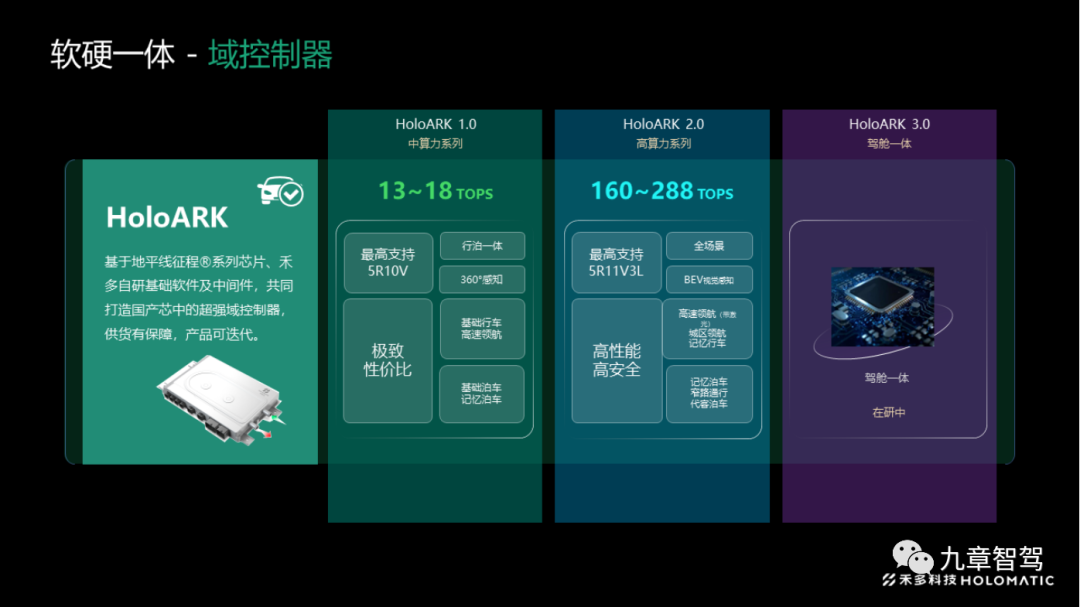
△HoloArk域控產(chǎn)品的進階路線
3.2 ? ? HoloArk1.0與HoloArk2.0方案對比
相比于HoloArk1.0版本,HoloArk2.0版本行泊一體方案提升的地方在于:
1)可實現(xiàn)傳感器數(shù)據(jù)的復(fù)用
HoloArk1.0版本,采用DPT方案,屬于硬切換,泊車和行車兩邊的數(shù)據(jù)尚不能復(fù)用;在HoloArk 2.0版本中,行車和泊車共用一個狀態(tài)機 —— 行車和泊車是雖然是兩套軟件,但是可以通過一套狀態(tài)機來調(diào)度兩者的軟件。比如說在高速行車狀態(tài)下,可以調(diào)度環(huán)視攝像頭的數(shù)據(jù)給行車軟件。在泊車狀態(tài)下,也可以調(diào)度周視攝像頭的障礙物數(shù)據(jù)到泊車軟件。
2)支持的功能更強
HoloArk 2.0版本的行泊一體域控具有較高的AI算力,能夠處理更高分辨率攝像頭的圖像信息和激光雷達(dá)的點云信息,以及運行大型的神經(jīng)網(wǎng)絡(luò)模型,因此,它能夠處理更多的Corner Case。

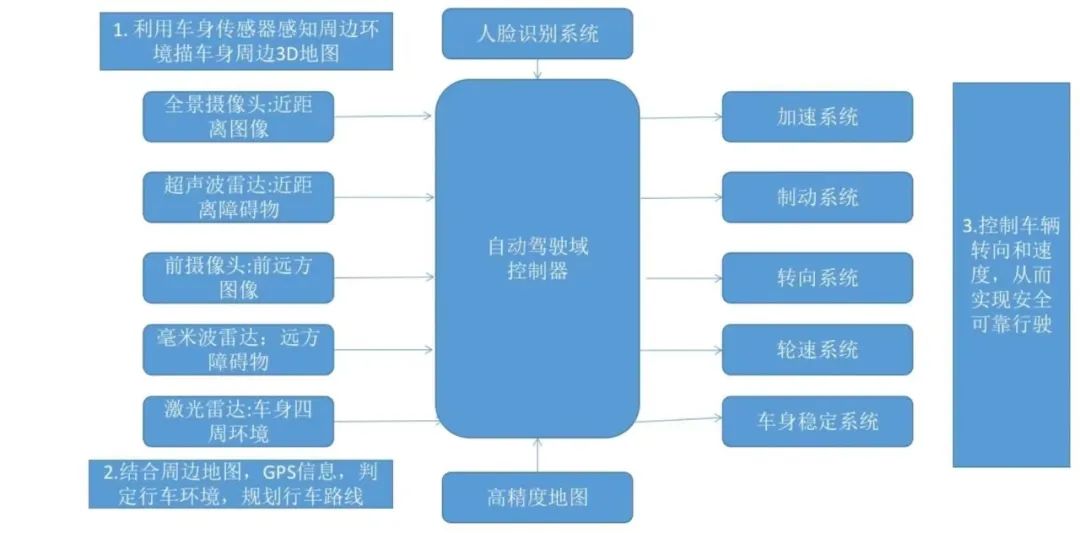
△行泊一體系統(tǒng)框架圖
毛濤舉例說:“視覺需要語義化,對于一些異型障礙物或不明障礙物,如果他們沒有出現(xiàn)在訓(xùn)練集里面,單通過攝像頭的圖像信息,系統(tǒng)多半識別不出來,但是通過激光雷達(dá)的點云信息就能夠識別出來。
“相比于HoloArk 1.0版本,HoloArk 2.0版本方案中的傳感器配置中多了一個800萬像素的前視長焦攝像頭,因此,系統(tǒng)便能夠在更遠(yuǎn)處、更清楚地看到物體。比如,系統(tǒng)能夠在150米甚至200米遠(yuǎn)的地方就能夠識別紅綠燈顏色,可以更好地輔助車輛完成自動變道。”
3)帶有功能冗余設(shè)計
在硬件架構(gòu)層面,HoloArk2.0版的行泊一體方案支持雙層裁切 —— 在硬件設(shè)計里面考慮了傳感器和芯片的冗余備份,也就是說,當(dāng)一顆地平線J5芯片或者該路傳感器失效的情況下,另外一顆地平線J5芯片還能接收到另外一路傳感器數(shù)據(jù),支持系統(tǒng)執(zhí)行最小安全風(fēng)險策略 —— 擔(dān)負(fù)起功能降級、駕駛員接管提醒、安全停車等職責(zé)。
3.3 ? ? HoloArk1.0 產(chǎn)品定位的選擇
HoloArk的第一代域控制器HoloArk1.0為什么要從中低算力行泊一體域控做起,并且采用多芯片組合的方案呢?

?△行泊一體架構(gòu)
毛濤解釋道:“行泊一體域控制器開發(fā)有兩種選擇:一種是大算力域控,另一種是中低算力域控。如果先開發(fā)大算力域控,它是應(yīng)用于高端車型,銷量不會太大,并且規(guī)模化量產(chǎn)落地時間也會偏晚。因此,我們打算先把中低算力域控平臺以一個合適的價位開發(fā)出來,并且要能夠在體驗、功能、成本上做到較好的平衡,也就是說做一款高性價比且適合盡快量產(chǎn)的產(chǎn)品。
“另外,從芯片的選型上來看,HoloArk1.0 是結(jié)合了當(dāng)時市場上主流的、已量產(chǎn)的車規(guī)級芯片的特點做出的芯片組合方案 —— TDA4VM相對來說比較適合做低速場景,J3芯片做行車上的感知是強項。”
4、如何克服域控制器在商業(yè)化落地過程中面臨的問題
HoloArk1.0 和HoloArk2.0都將在2023年實現(xiàn)前裝量產(chǎn)落地,在此過程中,各種挑戰(zhàn)必不可少。那么,禾多科技又是如何克服這些挑戰(zhàn)的呢?
4.1 ? ? 滿足客戶需求的同時,如何提升研發(fā)效率
從行業(yè)大環(huán)境看,智能駕駛域控制器方案已走到比拼交付的賽點,現(xiàn)在主機廠都希望快速地實現(xiàn)行泊一體方案的量產(chǎn)落地,因此主機廠在選擇供應(yīng)商合作的時候,不僅需要供應(yīng)商能夠為其提供一個與車輛性價比相匹配的方案,而且給的工期也非常緊湊。這就需要其供應(yīng)商在研發(fā)上有更高的效率。那么自動駕駛方案供應(yīng)商應(yīng)該如何提升域控制器的研發(fā)效率呢?
禾多科技認(rèn)為這需要具備完善的研發(fā)流程體系和明確的團隊分工。
1)完善的研發(fā)流程體系
于英俊說:“禾多有一整套的基于V模型開發(fā)的完整的流程體系,在流程的執(zhí)行過程中,我們把客戶需求導(dǎo)入到禾多的需求管理系統(tǒng),并且,我們專門有軟硬件架構(gòu)師去核對這些需求,如果發(fā)現(xiàn)需求中有不妥的地方,會及時地反饋給客戶。
“另外,我們也會把整個流程中的要求拆解到研發(fā)的每一項需求里,去指導(dǎo)研發(fā) —— 不管是硬件的研發(fā),還是軟件的研發(fā),比如從軟件的需求設(shè)計到軟件架構(gòu)的設(shè)計開發(fā),再到單元測試的整個環(huán)節(jié)。
“雖然說大家都有流程,可能外企對V模型流程掌握得比禾多科技更好,但禾多采用大小閉環(huán)的協(xié)同驅(qū)動的流程模式,系統(tǒng)、研發(fā)質(zhì)量等團隊介入需求的對接時間更早,比沿用傳統(tǒng)的V模型開發(fā)效率更高。”
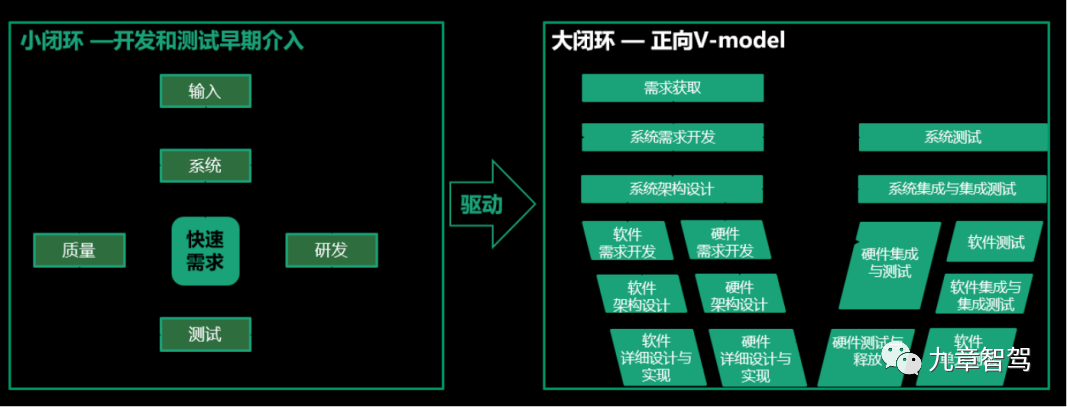
△大小閉環(huán)協(xié)同的開發(fā)流程
2)明確的團隊分工
禾多整個域控制器研發(fā)團隊的內(nèi)部分工非常明確——硬件設(shè)計,SOC/MCU底軟開發(fā),中間件部署等都會有不同的小組去負(fù)責(zé)。這樣的分工便于在針對于不同的需求都有對應(yīng)的研發(fā)團隊去負(fù)責(zé)對接,又因為都在一個部門,方案設(shè)計及評審階段,軟硬件團隊會綜合的評價設(shè)計本身及開發(fā)周期上的問題。
于英俊說:“域控的整個設(shè)計階段,我們并不是完全的串行化開發(fā),中間會穿插并行部分,比如在硬件設(shè)計過程中,原理圖設(shè)計可能要花一到兩個月才能做完,在設(shè)計中期,PCB Layout團隊就會參與進來展開布局。隨著域控復(fù)雜度越來越高,PCB Layout的設(shè)計要花近兩個月的時間,在布局中期又要引入仿真設(shè)計人員,基于這種團隊分工和協(xié)作的高效運轉(zhuǎn),整體項目的周期會得到大大的提升;正是由于完善的研發(fā)流程體系和明確的團隊分工保證了我們的域控研發(fā)工作能夠得以高效率的開展。”
4.2 ? ? 如何在研發(fā)人員有限的情況下,充分滿足客戶的需求
HoloArk研發(fā)團隊規(guī)模目前在50人左右,涉及SOC軟件、MCU軟件、HoloSAR中間件、平臺架構(gòu)、智能硬件等業(yè)務(wù)團隊。在人數(shù)上相比其它競品企業(yè)要少很多,那么禾多科技是如何在研發(fā)人員有限的情況下,去應(yīng)對未來多個客戶、多個項目的開發(fā)需求呢?
首先,依托現(xiàn)有團隊的豐富經(jīng)驗 —— 現(xiàn)有的團隊成員都有 Tier1背景,在域控研發(fā)方向具有較強的專業(yè)性,軟件開發(fā)人員的平均工作經(jīng)驗是 8 到 9 年,硬件開發(fā)人員的平均工作經(jīng)驗在15年左右。團隊在技術(shù)上已具備域控制器硬件+中間件+行泊功能軟件的自動駕駛?cè)珬Q邪l(fā)能力。
憑借其與主機廠長期協(xié)作中積累的經(jīng)驗,在解決客戶的開發(fā)需求過程中,禾多科技能夠及時去實現(xiàn)客戶的需求,并高效地定義、開發(fā)滿足客戶需求的域控產(chǎn)品。
其次,禾多科技也提前做好了一些準(zhǔn)備。于英俊告訴九章智駕:“現(xiàn)在Ark團隊在量產(chǎn)交付中的有三條大的平臺化產(chǎn)品線:IFC1.0/2.0智能一體機,Ark1.0/2.0中高算力域控,HoloSAR中間件。在每個產(chǎn)品定點前期,禾多都會針對每個產(chǎn)品做平臺化設(shè)計,用最短的時間內(nèi)打造原型機,完成底軟及功能的部署。那么,我們再去承接跟平臺接近的項目,可復(fù)用度較高,整體的工作量就減少很多。”
另外,禾多科技也在不斷地吸引優(yōu)秀人才的加入,擴大HoloArk的研發(fā)團隊規(guī)模。
4.3 ? ? 如何解決工程化問題
在量產(chǎn)項目中,工程化中的難題比單純的技術(shù)研發(fā)問題更加棘手,而要實現(xiàn)工程化就務(wù)必解決硬件的高可靠與高質(zhì)量,軟件的高性能與高實時,以及自動駕駛算法部署在域控平臺的特殊化需求。
工程化中的難題更多的是在項目落地過程中被排解出來的,比如功耗太高、器件不穩(wěn)等。
禾多的技術(shù)人員印象最深刻的例子是:ARK1.0 B樣件在做高低實驗的過程中,域控要連續(xù)全負(fù)載高溫運行1200小時,結(jié)果卻是,每運行至72小時就會反復(fù)出現(xiàn)死機卡頓。針對這個問題,軟硬件工程師現(xiàn)場分析,對軟硬件配置逐一排查,測電源信號波形、DDR眼圖等,最終花了1周時間找到root cause是在芯片底層開發(fā)的一個安全監(jiān)控模塊出現(xiàn)了邏輯判斷錯誤。
HoloArk 2.0用到的元器件物料數(shù)量要遠(yuǎn)超于過去任何車上ECU內(nèi)的元器件數(shù)量,系統(tǒng)非常復(fù)雜,整體功耗高達(dá)100W,因此,域控的殼體散熱一直是焦點問題。為保證芯片的運行溫度,禾多的散熱系統(tǒng)采用液冷方案,液冷管道的布置、流速的調(diào)節(jié)、關(guān)鍵芯片的凸臺等設(shè)計都有技術(shù)創(chuàng)新和優(yōu)化處理。
域控制器的可靠性的問題也被有些企業(yè)認(rèn)為是工程化問題的挑戰(zhàn)之一。比如,一些域控制器會存在高溫、長時間運行等會死機或異常復(fù)位;數(shù)據(jù)量大時會丟包、接收數(shù)據(jù)中斷;底層軟件存在bug導(dǎo)致堆棧溢出、多核心跳數(shù)據(jù)不同步等。禾多在開發(fā)階段也會遇到類似問題,但其硬件開發(fā)體系一直按照V模型正向開發(fā),遵循從需求->設(shè)計->仿真->生產(chǎn)->驗證流程,嚴(yán)格把控軟硬件每個環(huán)節(jié)的交付,所以在域控硬件在EMC測試環(huán)節(jié)出現(xiàn)的死機卡頓等問題無一是硬件問題,個別是軟件邏輯判斷方面的問題。
在行泊功能部署運行階段,也會出現(xiàn)丟包及時間跳變的問題。針對這種情況,禾多的做法是:調(diào)整底層通信的Qos策略,以及支持多種時間同步方式(gPTP,PPS,SPI等),為上層功能部署管理層與數(shù)據(jù)層兩套時間。
對于自動駕駛初創(chuàng)公司而言,工程化能力方面的質(zhì)疑是一個繞不開的話題,那么禾多科技又是如何培養(yǎng)其團隊自身的工程化能力?
毛濤舉例說:“比如BOM的設(shè)計就是一個比較考驗工程化能力的事情,域控制器BOM的設(shè)計相對來說是比較復(fù)雜、也是最要緊的事情。我們一般會根據(jù)自己團隊的經(jīng)驗做初版BOM,然后再根據(jù)多個合作伙伴的建議對初版BOM進行完善,最后再經(jīng)過內(nèi)部多方的審核,把最終版的 BOM 確定下來。比如,在測試過程當(dāng)中,某家的電阻、電路不行或者板子厚度不夠等等,合作伙伴會給我們更專業(yè)的一些建議,我們可能會進行部件的重新選擇,BOM也會做相應(yīng)的調(diào)整。”
成本控制一直是車企和tier1不容忽視的工程化難題,而對于如何把域控產(chǎn)品做到高性價比,禾多也已有一套成熟的管理系統(tǒng):
A.域控產(chǎn)品平臺化,在關(guān)鍵芯片選型上盡可能做到可復(fù)用;
B.域控預(yù)置禾多自主IP的Autosar軟件(HoloSAR),滿足從配置到代碼生成等一系列標(biāo)準(zhǔn)化操作,實現(xiàn)軟硬件解耦及SOA架構(gòu),既能減少每個項目上對國外AUTOSAR軟件的依賴,又能實現(xiàn)平臺化,縮短研發(fā)周期。
結(jié)語:
專注于量產(chǎn)不僅關(guān)系到自動駕駛初創(chuàng)企業(yè)在現(xiàn)階段是否能夠?qū)崿F(xiàn)“自我造血”,也關(guān)系企業(yè)在未來是否會有更好的發(fā)展前景。在軟件定義汽車的時代,數(shù)據(jù)已成為自動駕駛企業(yè)的核心競爭力,然而數(shù)據(jù)的獲取依賴于前裝量產(chǎn)。
正如禾多科技將其自研域控制器命名為HoloArk——寓意為承載其行泊一體自動駕駛系統(tǒng)的「方舟」。相信隨著HoloArk在明年開始量產(chǎn)裝車,禾多科技有望通過與主機廠客戶的深度合作獲取更大規(guī)模、更加有效的真實交通數(shù)據(jù),進而持續(xù)驅(qū)動其整體自動駕駛技術(shù)的迭代升級。
參考資料:
1.?行泊一體「起跑」
https://mp.weixin.qq.com/s/z7G_HptFrsEKklcNXKjacA
2.?利用端到端閉環(huán)數(shù)據(jù)驅(qū)動自動駕駛安全升級
https://mp.weixin.qq.com/s/dvhiWB1YxrxqG6FrgnibKw
3.?打造行泊一體、軟硬一體,體驗升級的自動駕駛
https://mp.weixin.qq.com/s/cmpY_-QzCHT1GEk2sY72uA
編輯:黃飛























 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論