,而且控制電路復(fù)雜、控制精度低、生產(chǎn)成本高,系統(tǒng)穩(wěn)定性不夠,步進(jìn)分辨率低、缺乏靈活性,低頻時(shí)的振蕩和噪聲大,而且受步進(jìn)電機(jī)機(jī)械結(jié)構(gòu)和空間的限制,步進(jìn)電機(jī)的步距角不可能無限的小,難以滿足高精度開環(huán)控制的需求。由于FPGA編程方式簡(jiǎn)單,開發(fā)周期短,可靠性高,使其在工業(yè)控制領(lǐng)域的應(yīng)
2015-06-11 13:47:16 4768
4768 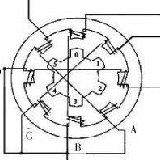
步進(jìn)電機(jī)有一個(gè)技術(shù)參數(shù):空載啟動(dòng)頻率,即步進(jìn)電機(jī)在空載情況下能夠正常啟動(dòng)的脈沖頻率,如果脈沖頻率高于該值,電機(jī)不能正常啟動(dòng),可能發(fā)生丟步或堵轉(zhuǎn)。
2020-09-08 16:01:363690 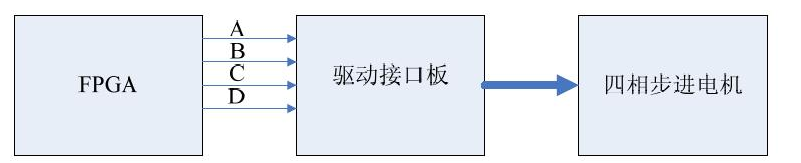
先來看一下硬件原理圖,可看到控制步進(jìn)電機(jī)的管腳分別為:GPIO6[2]、GPIO6[3]、GPIO6[4]和GPIO1[15]。使用的是一路四相五線步進(jìn)電機(jī),使用的電機(jī)驅(qū)動(dòng)芯片是L9110。
2023-08-04 14:45:412088 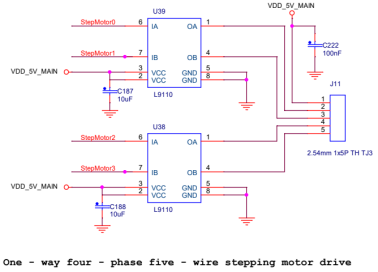
使用的步進(jìn)電機(jī)為四相步進(jìn)電機(jī)。轉(zhuǎn)子小齒數(shù)為64。系統(tǒng)中采用四路I/O進(jìn)行并行控制,FPGA直接發(fā)出多相脈沖信號(hào),在通過功率放大后,進(jìn)入步進(jìn)電機(jī)的各相繞組。這樣就不再需要脈沖分配器。脈沖分配器的功能可以由純
2012-03-20 09:54:31
【連載】 FPGAVerilog HDL 系列實(shí)例Verilog HDL 之步進(jìn)電機(jī)驅(qū)動(dòng)控制步進(jìn)電機(jī)的用途還是非常廣泛的,目前打印機(jī),繪圖儀,機(jī)器人等等設(shè)備都以步進(jìn)電機(jī)為動(dòng)力核心。那么,下面我們
2021-06-29 08:11:48
步進(jìn)電機(jī)是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機(jī)構(gòu)。可以通過控制脈沖數(shù)來控制步進(jìn)電機(jī)的角位移量,從而達(dá)到準(zhǔn)確定位的目的,同時(shí)可以通過控制脈沖頻率來控制電機(jī)的速度和加速度,從而達(dá)到調(diào)速的目的。由于步進(jìn)電機(jī)控制簡(jiǎn)單、運(yùn)行可靠,所以被廣泛應(yīng)用于各種控制裝置中。
2019-08-19 07:31:47
FPGA在步進(jìn)電機(jī)驅(qū)動(dòng)上的應(yīng)用實(shí)例及代碼由于直流電機(jī)具有速度易控制,精度和效率高,能在寬范圍內(nèi)實(shí)現(xiàn)平滑調(diào)速等特點(diǎn)而在冶金、機(jī)械加工制造等行業(yè)中得到廣泛應(yīng)用。該設(shè)計(jì)采用FPGA作為直流電機(jī)的控制
2012-08-12 11:54:10
步進(jìn)電機(jī) 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件,應(yīng)用極為廣泛。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而
2021-07-08 08:10:13
我用fpga來控制220v的較大功率步進(jìn)電機(jī),使用的電機(jī)控制驅(qū)動(dòng)模塊有三組信號(hào) 脈沖 方向 使能。這三組正級(jí)直連fpga 3.3v輸出信號(hào)后通過升壓后得到的5v控制信號(hào),負(fù)極統(tǒng)一單獨(dú)接地(沒走
2017-09-15 17:46:04
步進(jìn)電機(jī)在控制的過程中怎么提高控制的精度
2023-10-12 06:02:50
步進(jìn)電機(jī)在控制的過程中怎么防止丟步
2023-10-12 08:07:53
距角,當(dāng)停止的位置確定以后,也就決定了步進(jìn)電機(jī)需要給定的脈沖數(shù)。在包裝機(jī)控制中,給定脈沖數(shù)的多少,還與機(jī)構(gòu)的參數(shù)有關(guān),例如螺桿的直徑等。在包裝機(jī)械中,很多情況下需要控制執(zhí)行機(jī)構(gòu)的運(yùn)行速度和運(yùn)行位置
2018-10-12 10:57:16
`步進(jìn)電機(jī)控制算法步進(jìn)電機(jī)控制通常采用雙向驅(qū)動(dòng)電流,其電機(jī)步進(jìn)由按順序切換繞組來實(shí)現(xiàn)。通常這種步進(jìn)電機(jī)有3個(gè)驅(qū)動(dòng)順序:?jiǎn)蜗嗳?b class="flag-6" style="color: red">步進(jìn)驅(qū)動(dòng):在這種模式中,其繞組按如下順序加電,AB/CD/BA/DC(BA
2014-01-22 10:49:38
什么是步進(jìn)電機(jī)?步進(jìn)電機(jī)有哪幾種?步進(jìn)電機(jī)是怎么控制的?
2021-10-08 07:28:20
FPGA控制_步進(jìn)電機(jī)模塊使用說明今天給大俠帶來步進(jìn)電機(jī)模塊使用說明,話不多說,上貨。一、步進(jìn)電機(jī)簡(jiǎn)介步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),是現(xiàn)代數(shù)字程序控制系統(tǒng)中的主要執(zhí)行元件
2021-07-07 07:57:59
。對(duì)于不同負(fù)載、不同轉(zhuǎn)速,需要選擇合適的基礎(chǔ)頻率與跳變頻率,才能夠達(dá)到最佳控制效果。指數(shù)曲線,在軟件編程中,先算好時(shí)間常數(shù)存貯在計(jì)算機(jī)存貯器內(nèi),工作時(shí)指向選取。通常,完成步進(jìn)電機(jī)的加減速時(shí)間為300ms以上。如果使用過于短的加減速時(shí)間,對(duì)絕大多數(shù)步進(jìn)電機(jī)來說,就會(huì)難以實(shí)現(xiàn)步進(jìn)電機(jī)的高速旋轉(zhuǎn)。
2016-01-11 15:02:13
步進(jìn)電機(jī)的驅(qū)動(dòng)與控制,步進(jìn)電機(jī)基礎(chǔ)(5.9)-步進(jìn)電機(jī)的驅(qū)動(dòng)與控制-三相步進(jìn)電機(jī)的驅(qū)動(dòng)電路前言基本信息前言說明5.9 三相步進(jìn)電機(jī)的驅(qū)動(dòng)電路1 . 三相電機(jī)的驅(qū)動(dòng)方式三相步進(jìn)電機(jī)用驅(qū)動(dòng)器ICICIC
2021-07-08 09:06:00
》這本書,進(jìn)行的學(xué)習(xí)過程中的知識(shí)記錄和心得體會(huì)的記錄。5.6 閉環(huán)控制??步進(jìn)電機(jī)基本上以開環(huán)電路驅(qū)動(dòng),用于位置控制。換句話說,步進(jìn)電機(jī)以外的電機(jī)尤其是高精度的步進(jìn)電機(jī)之外并沒有做開環(huán)控制定位的,而用開環(huán)電路驅(qū)動(dòng)的電機(jī)只有步進(jìn)電機(jī)。例如無刷電機(jī),首先為切換相,
2021-07-07 06:18:52
通過FPGA實(shí)現(xiàn)輸出有限個(gè)PWM個(gè)數(shù),實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)精確控制,順便說一句,這個(gè)問題16年就有人咨詢過了,一個(gè)人做出來就出來得瑟,有啥裝的。我給大家分享一下。順便把這個(gè)人掛出來下面我截圖一下FPGA的程序同時(shí),基于這個(gè)程序,就可以嘗試編寫S加減速算法和T型算法
2022-09-01 17:28:57
PLC控制步進(jìn)電機(jī)在機(jī)床自動(dòng)線中的應(yīng)用是什么?數(shù)控滑臺(tái)的操控因素有哪些?
2021-09-30 08:55:24
verliog串口控制步進(jìn)電機(jī),步進(jìn)電機(jī)的用途還是非常廣泛的,目前打印機(jī),繪圖儀,機(jī)器人等等設(shè)備都以步進(jìn)電機(jī)為動(dòng)力核心。通過一學(xué)期的FPGA學(xué)習(xí),嘗試用FPGA通過狀態(tài)機(jī)控制步進(jìn)電機(jī)的狀態(tài),能夠通過
2021-07-09 06:42:43
基于FPGA的步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)控制設(shè)計(jì)一、基本要求:在理解步進(jìn)電機(jī)的工作原理以及細(xì)分原理的基礎(chǔ)上,利用FPGA實(shí)現(xiàn)四相步進(jìn)電機(jī)的8細(xì)分驅(qū)動(dòng)控制。二、評(píng)分標(biāo)準(zhǔn):1、設(shè)計(jì)方案介紹 (共15分)要求:詳細(xì)
2013-06-14 22:03:43
同步電機(jī)等電機(jī)中的應(yīng)用有較多的研究,相關(guān)文獻(xiàn)較多。混合式步進(jìn)電機(jī)與永磁凸極同步電動(dòng)機(jī)在作用機(jī)理上相似,雖有不同之處,但從本質(zhì)上,混合式步進(jìn)電機(jī)可以說是一種低速凸極永磁同步電機(jī),混合式步進(jìn)電機(jī)控制可以
2021-09-10 08:45:23
什么是步進(jìn)電機(jī),它是怎么控制的?步進(jìn)電機(jī)的種類有哪些?怎么實(shí)現(xiàn)步進(jìn)電機(jī)的正轉(zhuǎn)反轉(zhuǎn)?
2021-10-20 06:18:48
誰有FPGA步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)控制設(shè)計(jì)資料,求共享
2014-04-30 09:35:17
步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制電機(jī),輸入脈沖總數(shù)控制步進(jìn)電機(jī)的總旋轉(zhuǎn)角度,電機(jī)的速度由每秒輸入脈沖數(shù)目所決定,因此易實(shí)現(xiàn)機(jī)械位置的精準(zhǔn)控制。
2019-10-24 08:08:21
步進(jìn)電機(jī)是一種完全數(shù)字化的電動(dòng)執(zhí)行機(jī)構(gòu),從原理上說,其角位移與驅(qū)動(dòng)脈沖的個(gè)數(shù)成正比,在正常情況下,步進(jìn)電機(jī)具有使用簡(jiǎn)單、運(yùn)動(dòng)精確、連續(xù)運(yùn)行無累積誤差等特點(diǎn),因而被廣泛應(yīng)用于各種位置控制系統(tǒng)中。當(dāng)前
2019-09-19 06:55:10
,并在Modelsim 中完成了仿真。仿真結(jié)果表明,分頻、定時(shí)、正弦/ 余弦函數(shù)以及全橋控制信號(hào),都可以由FPGA 準(zhǔn)確無誤地產(chǎn)生,達(dá)到了設(shè)計(jì)的要求,取得了滿意的效果。在實(shí)際的應(yīng)用中,電機(jī)運(yùn)行平穩(wěn)。關(guān)鍵詞: FPGA ;步進(jìn)電機(jī);細(xì)分;斬波恒流
2010-12-15 15:40:34
一、工程簡(jiǎn)介1、本工程實(shí)現(xiàn)的功能:用FPGA通過兩個(gè)按鍵控制步進(jìn)電機(jī)的啟動(dòng)和停止,硬件包括:黑金開發(fā)板、步進(jìn)電機(jī)和Vince步進(jìn)電機(jī)驅(qū)動(dòng)器和電腦。2、FPGA通過控制電機(jī)驅(qū)動(dòng)器來控制步進(jìn)電機(jī)的旋轉(zhuǎn)
2021-07-08 07:41:16
本文介紹通過FPGA實(shí)現(xiàn)的步進(jìn)電機(jī)控制器。該控制器可以作為單片機(jī)或DSP的一個(gè)直接數(shù)字控制的外設(shè),只需向控制器的控制寄存器和分頻寄存器寫入數(shù)據(jù),即可實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制。
2021-04-29 06:05:44
本人想用dsp和fpga聯(lián)合弄步進(jìn)電機(jī)控制,請(qǐng)問一個(gè)大概的實(shí)現(xiàn)方向是什么樣的
2015-04-16 16:24:17
請(qǐng)問STM32如何在定時(shí)器中控制步進(jìn)電機(jī)?
2021-12-21 06:00:59
想求一個(gè)FPGA控制步進(jìn)電機(jī)的程序。非常感謝。
2019-05-27 04:13:24
步進(jìn)電機(jī)控制(含原理圖和程序)
2008-10-09 15:45:49 239
239 本文說明了基于FPGA的步進(jìn)電機(jī)的控制原理。
2009-04-02 16:39:3850 用MCP定時(shí)器控制步進(jìn)電機(jī):步進(jìn)電機(jī)簡(jiǎn)介1.1.1 步進(jìn)電機(jī)步進(jìn)電機(jī)和普通電動(dòng)機(jī)不同之處是步進(jìn)電機(jī)接受脈沖信號(hào)的控制。步進(jìn)電機(jī)靠一種叫環(huán)形分配器的電子開關(guān)器件,通過功
2009-09-19 11:36:3222 用GPIO做步進(jìn)電機(jī)控制:步進(jìn)電機(jī)和普通電動(dòng)機(jī)不同之處是步進(jìn)電機(jī)接受脈沖信號(hào)的控制。步進(jìn)電機(jī)靠一種叫環(huán)形分配器的電子開關(guān)器件,通過功率放大器使勵(lì)磁繞組按照順序輪流接通
2009-09-19 11:37:5869 步進(jìn)電機(jī)是一種易于精確控制的電機(jī),由于其良好的性能而受到廣泛的應(yīng)用。其控制方法也多種多樣。介紹了8051系列單片機(jī)對(duì)步進(jìn)電機(jī)的控制方法,并且提出和對(duì)比了幾種步進(jìn)電機(jī)
2009-11-07 15:11:00136 美國(guó)Allegro 公司推出的A3972 型串口控制器是步進(jìn)電機(jī)微步距驅(qū)動(dòng)專用電路。一個(gè)A3972 外加一個(gè)CPU 即可實(shí)現(xiàn)步進(jìn)電機(jī)的微步距驅(qū)動(dòng),本文用VHDL 語言對(duì)FPGA 進(jìn)行編程仿真,產(chǎn)生A3972
2009-12-19 16:05:5731 本設(shè)計(jì)采用凌陽16 位單片機(jī)SPCE061A對(duì)步進(jìn)電機(jī)進(jìn)行控制,通過IO口輸出的具有時(shí)序的方波作為步進(jìn)電機(jī)的控制信號(hào),信號(hào)經(jīng)過芯片L298N驅(qū)動(dòng)步進(jìn)電機(jī);同時(shí),用4X4的鍵盤來對(duì)電機(jī)的狀
2010-01-09 10:25:45160 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL 為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA 內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速
2010-01-18 14:52:31314 步進(jìn)電機(jī)控制
2010-02-10 15:05:031118 基于FPGA的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)電路設(shè)計(jì)摘要:在采用步進(jìn)電機(jī)驅(qū)動(dòng)的機(jī)構(gòu)中,為了提高定位精度,提出了一種基于FPGA 的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)電路的設(shè)計(jì)方案。
2010-05-11 16:09:4150 FPGA在步進(jìn)電機(jī)任意細(xì)分驅(qū)動(dòng)中的應(yīng)用
摘要:介紹一種采用FPGA 輸出PWM控制信號(hào)對(duì)步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)的實(shí)現(xiàn)方法。利用FPGA 中的嵌入式EAB 構(gòu)成LPM-ROM,存放步進(jìn)電機(jī)各
2010-05-11 16:55:2048 論文介紹了步進(jìn)電機(jī)的控制原理,利用脈沖疊加原理,以Verilog HDL為實(shí)體設(shè)計(jì)輸入,設(shè)計(jì)并實(shí)現(xiàn)了一套集成于FPGA內(nèi)部的步進(jìn)電機(jī)控制系統(tǒng)。該系統(tǒng)可以控制步進(jìn)電機(jī)實(shí)現(xiàn)定速、加速、減
2010-07-13 16:14:4045 控制步進(jìn)電機(jī)的現(xiàn)場(chǎng)總線端子-集成的步進(jìn)電機(jī)控制器:用于新驅(qū)動(dòng)技術(shù)的總線端子為最高功率為200W 的小型步進(jìn)電機(jī)提供了運(yùn)動(dòng)控制解決方案。KL2531和KL2541 步進(jìn)電機(jī)端子便是用于傳
2010-10-06 09:52:5741 步進(jìn)電機(jī)控制實(shí)驗(yàn)
一.實(shí)驗(yàn)?zāi)康牧私?b class="flag-6" style="color: red">步進(jìn)電機(jī)的工作原理,
2008-09-22 17:53:013383 
實(shí)驗(yàn) 步進(jìn)電機(jī)自動(dòng)控制一、實(shí)驗(yàn)?zāi)康?nbsp; 1.掌握用PLC控制步進(jìn)電機(jī)的方法。
2008-09-30 13:16:041450 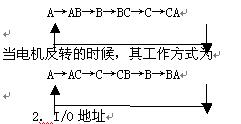
單片機(jī)控制步進(jìn)電機(jī)的原理
本資料詳細(xì)介紹鄧步進(jìn)電機(jī)的工作原理以及單片機(jī)控制步進(jìn)電機(jī)的特點(diǎn)。步進(jìn)電機(jī)是數(shù)字控制電機(jī),它將脈沖信號(hào)轉(zhuǎn)
2009-03-30 11:13:2484434 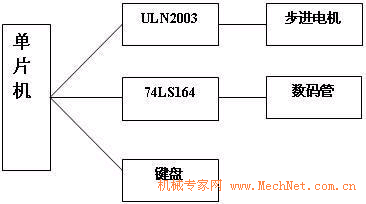
8255A控制步進(jìn)電機(jī)
<實(shí)驗(yàn)?zāi)康?gt;了解步進(jìn)電機(jī)的的基本控制原理,掌握控制步進(jìn)電機(jī)的轉(zhuǎn)速、轉(zhuǎn)向的程序設(shè)計(jì)方法。<實(shí)驗(yàn)內(nèi)
2009-06-28 00:02:405353 步進(jìn)電機(jī)細(xì)分控制原理
步進(jìn)電機(jī)控制已經(jīng)蘊(yùn)含了細(xì)分的原理。電機(jī)內(nèi)部磁場(chǎng)每旋轉(zhuǎn)一個(gè)圓周, 步進(jìn)電機(jī)前進(jìn)一整個(gè)步距角。若四相步
2010-01-10 22:40:218751 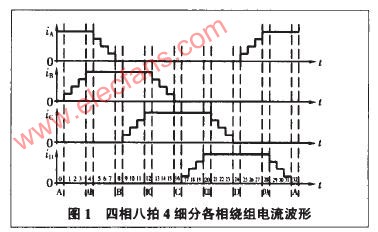
基于FPGA的步進(jìn)電機(jī)控制器設(shè)計(jì)
?????? 目前大多數(shù)步進(jìn)電機(jī)控制器需要主控制器發(fā)送時(shí)鐘信號(hào),并且要至少一個(gè)I/O口來輔助控
2010-02-09 10:44:442465 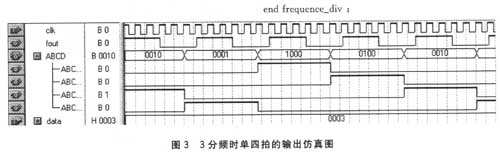
步進(jìn)電機(jī)是一種感應(yīng)電機(jī),廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。電子發(fā)燒友網(wǎng)整理了步進(jìn)電機(jī)控制系統(tǒng)的一些控制原理及步進(jìn)電機(jī)驅(qū)動(dòng)電路圖、步進(jìn)電機(jī)控制驅(qū)動(dòng)程序等知識(shí),較為翔實(shí)的介紹了步進(jìn)電機(jī)控制系統(tǒng)。
2012-06-18 16:52:56

步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng) 步進(jìn)電機(jī)控制系統(tǒng)
2015-11-02 18:07:0154 步進(jìn)電機(jī)控制,基于C51的步進(jìn)電機(jī)控制,快來下載學(xué)習(xí)吧
2016-01-13 14:12:0750 很不錯(cuò)的資料,基于FPGA的步進(jìn)電機(jī)控制,希望對(duì)大家學(xué)習(xí)有幫助。
2016-03-21 17:23:538 基于FPGA的電機(jī)控制,同時(shí)控制步進(jìn)電機(jī)和伺服電機(jī)。
2016-03-21 17:09:1442 基于FPGA的兩相步進(jìn)電機(jī)細(xì)分驅(qū)動(dòng)器設(shè)計(jì)
2016-04-25 10:54:0920 步進(jìn)電機(jī)控制參考資料,基于L297/298的步進(jìn)電機(jī)工作模式的單片機(jī)接口
2016-06-02 17:09:584 步進(jìn)電機(jī)課程設(shè)計(jì)------步進(jìn)電機(jī)控制系統(tǒng)設(shè)計(jì)報(bào)告
2016-06-17 14:59:5311 隨著現(xiàn)代衛(wèi)星載荷探測(cè)功能日益增強(qiáng),對(duì)電機(jī)等活動(dòng)部件的壽命與可靠性提出更高要求。步進(jìn)電機(jī)自身具有體積小、質(zhì)量輕、易于控制、誤差不積累、可靠性高等優(yōu)點(diǎn),適合充當(dāng)星上載荷活動(dòng)部件。本文中使用一款兩相
2017-11-07 09:21:460 提出一種應(yīng)用現(xiàn)場(chǎng)可編程門陣列(FPGA)實(shí)現(xiàn)多軸步進(jìn)電機(jī)控制器的方法。采用IP設(shè)計(jì)思想,步進(jìn)電機(jī)的運(yùn)動(dòng)控制由硬件電路(步進(jìn)電機(jī)IP核)實(shí)現(xiàn),軌跡計(jì)算由同一芯片上的微處理器(Nios II軟核)實(shí)現(xiàn)
2017-12-06 10:41:3023 多軸步進(jìn)電機(jī)插補(bǔ)控制器及多軸步進(jìn)電機(jī)運(yùn)動(dòng)控制卡控制方法
2018-04-11 10:24:4726 對(duì)步進(jìn)電機(jī)的控制是經(jīng)濟(jì)型數(shù)控系統(tǒng)開發(fā)時(shí)的一項(xiàng)重要內(nèi)容,其中對(duì)步進(jìn)電機(jī)運(yùn)動(dòng)過程中的升 降速控制是重點(diǎn)。步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元步進(jìn)電機(jī)件。
2018-10-26 09:23:0018048 工業(yè)控制上用到的步進(jìn)電機(jī)有多種控制方式。對(duì)于空調(diào)使用的步進(jìn)電機(jī)并不太了解,但從它控制簡(jiǎn)單,且主要需要價(jià)格便宜的特性來看,它應(yīng)該是使用的脈沖控制方式。
2019-10-07 16:39:0015368 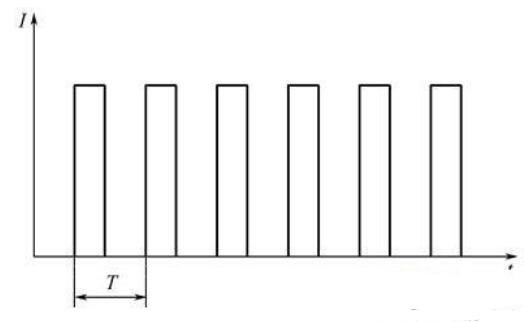
步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)角度。
2019-10-01 08:58:0015865 要啟用伺服翻轉(zhuǎn)開關(guān),請(qǐng)打開1和0。現(xiàn)在,您可以移動(dòng)操縱桿來控制步進(jìn)電機(jī)的運(yùn)動(dòng)。
2019-09-29 17:43:505481 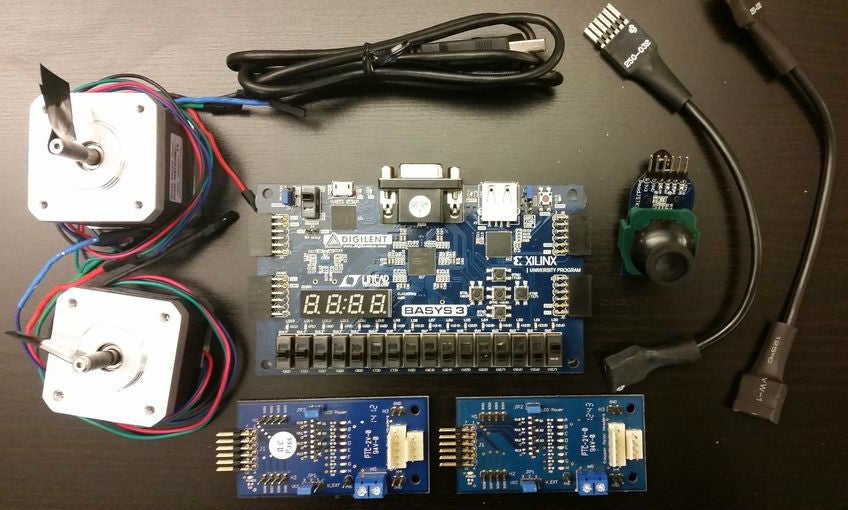
由于 自動(dòng)化 技術(shù) 的不斷 向前發(fā)展 , 作為 自動(dòng)控制系統(tǒng)中主要元 件步進(jìn)電機(jī) , 它 的應(yīng)用范 圍越來越 廣。 例 如有些精密儀器和 設(shè)備 , 要求步進(jìn) 電機(jī) 的 步 距 角 很小
2019-11-04 08:00:005 步進(jìn)電機(jī)控制器:它是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)角度。
2019-12-10 08:49:067858 ,并把斬波控制電路集成到FPGA 內(nèi)部,極大地提高了系統(tǒng)的集成度和穩(wěn)定性。微控制器只需提供細(xì)分?jǐn)?shù)等參數(shù),就能精確控制步進(jìn)電機(jī)的運(yùn)行,特別適用于某些實(shí)時(shí)控制場(chǎng)合。
2020-07-24 16:51:3928 步進(jìn)電機(jī)和伺服電機(jī)在工業(yè)傳動(dòng)控制領(lǐng)域都是重要的控制部件,應(yīng)用面廣泛。但是步進(jìn)電機(jī)和伺服電機(jī)有什么不同呢?
2020-12-14 21:28:351082 介紹基于FPGA 的步進(jìn)電機(jī)控制器的設(shè)計(jì), 在分析步進(jìn)電機(jī)的工作原理的基礎(chǔ)上, 給出了層次化設(shè)計(jì)方案與VHDL程序,并利用Quartus Ⅱ進(jìn)行了仿真并給出了仿真結(jié)果。它以FP GA 作為核心器件
2021-02-05 11:37:0027 51單片機(jī)控制步進(jìn)電機(jī)的C程序。
2021-05-17 09:28:1810 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)并且運(yùn)用范圍廣泛的電機(jī)控制器,步進(jìn)電機(jī)控制器怎么使用?下面就由小編來簡(jiǎn)單介紹一下!
2021-07-19 09:52:575456 ? 步進(jìn)電機(jī)又稱脈沖電機(jī),它是一種感應(yīng)電機(jī),涉及到機(jī)械、電機(jī)、電子及計(jì)算機(jī)等許多專業(yè)知識(shí)。步進(jìn)電機(jī)作為執(zhí)行元件,是機(jī)電一體化的關(guān)鍵產(chǎn)品之一,廣泛應(yīng)用在各種自動(dòng)化控制系統(tǒng)中。隨著微電子和計(jì)算機(jī)技術(shù)
2021-07-19 15:49:3311901 本文檔作備份用。摘 要: 設(shè)計(jì)了一種具有多模式的步進(jìn)電機(jī)控制裝置,本裝置基于STC的一款單片機(jī)STC89C52,軟件部分由C51編寫,包含啟停中斷程序、轉(zhuǎn)向中斷程序、步進(jìn)電機(jī)調(diào)速程序以及鍵盤信號(hào)
2021-11-23 16:22:5118 一種基于FPGA-的步進(jìn)電機(jī)控制系統(tǒng)的設(shè)計(jì).pdf
2022-06-23 14:52:068 步進(jìn)電機(jī)的旋轉(zhuǎn)速度可以通過控制脈沖信號(hào)的頻率和電機(jī)驅(qū)動(dòng)方式來實(shí)現(xiàn)。
脈沖頻率控制:步進(jìn)電機(jī)的旋轉(zhuǎn)速度與脈沖信號(hào)的頻率成正比,因此可以通過調(diào)整脈沖信號(hào)的頻率來控制電機(jī)的旋轉(zhuǎn)速度。一般來說
2023-03-08 17:03:123332 步進(jìn)電機(jī)是一種可以與脈沖信號(hào)同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機(jī),步進(jìn)電機(jī)的也稱為“脈沖電機(jī)”。由于步進(jìn)電機(jī)無需使用位置傳感器僅通過開環(huán)控制即可實(shí)現(xiàn)準(zhǔn)確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:321227 
利用單片機(jī)實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的控制,編寫程序,用四路 I/O口實(shí)現(xiàn)環(huán)形脈沖的分配,控制步進(jìn)電機(jī)按固定方向連續(xù)轉(zhuǎn)
動(dòng)。同時(shí),要求按下“Positive(正轉(zhuǎn))”按鍵時(shí),控制步進(jìn)電機(jī)
2023-03-21 15:25:243 步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于脈沖信號(hào)的頻率和脈沖數(shù),而不受負(fù)載變化的影響,即給電機(jī)加一- 個(gè)脈沖信號(hào),電機(jī)則轉(zhuǎn)過
2023-03-21 11:01:202 步進(jìn)電機(jī)步進(jìn)電機(jī)是將電脈沖信號(hào)轉(zhuǎn)變?yōu)榻俏灰苹蚓€位移的開環(huán)控制元件。
步進(jìn)電機(jī)收到一個(gè)脈沖,步進(jìn)電機(jī)走一個(gè)步距角。
在非超載的情況下,電機(jī)的轉(zhuǎn)速、停止的位置只取決于控制脈沖信號(hào)的頻率和脈沖數(shù)
2023-03-22 10:42:590 步進(jìn)電機(jī)控制器是一種專門用于控制步進(jìn)電機(jī)的設(shè)備,可以用來控制步進(jìn)電機(jī)的轉(zhuǎn)速和方向。步進(jìn)電機(jī)控制器通常包括一個(gè)驅(qū)動(dòng)電路板和一個(gè)控制板,驅(qū)動(dòng)電路板用于提供電源和輸出脈沖信號(hào),控制板則用于控制步進(jìn)電機(jī)的運(yùn)行。
步進(jìn)電機(jī)控制器的應(yīng)用設(shè)置一般包括以下幾個(gè)方面:
2023-03-26 22:30:201184 步進(jìn)電機(jī)控制器是一種能夠發(fā)出均勻脈沖信號(hào)的電子產(chǎn)品,它發(fā)出的信號(hào)進(jìn)入步進(jìn)電機(jī)驅(qū)動(dòng)器后,會(huì)由驅(qū)動(dòng)器轉(zhuǎn)換成步進(jìn)電機(jī)
所需要的強(qiáng)電流信號(hào),帶動(dòng)步進(jìn)電機(jī)運(yùn)轉(zhuǎn)。步進(jìn)電機(jī)控制器能夠準(zhǔn)確的控制步進(jìn)電機(jī)轉(zhuǎn)過每一個(gè)
2023-05-05 14:16:034 步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-08-25 11:15:10649 
電子發(fā)燒友網(wǎng)站提供《步進(jìn)電機(jī)控制器的FPGA的實(shí)現(xiàn).pdf》資料免費(fèi)下載
2023-10-07 16:29:171 步進(jìn)電機(jī)的運(yùn)行要有一電子裝置進(jìn)行驅(qū)動(dòng),這種裝置就是步進(jìn)電機(jī)驅(qū)動(dòng)器,它是把控制系統(tǒng)發(fā)出的脈沖信號(hào),加以放大以驅(qū)動(dòng)步進(jìn)電機(jī)。步進(jìn)電機(jī)的轉(zhuǎn)速與脈沖信號(hào)的頻率成正比,控制步進(jìn)電機(jī)脈沖信號(hào)的頻率,可以對(duì)電機(jī)精確調(diào)速;控制步進(jìn)脈沖的個(gè)數(shù),可以對(duì)電機(jī)精確定位。
2023-10-19 10:59:42262 
電子發(fā)燒友網(wǎng)站提供《基于FPGA的步進(jìn)電機(jī)伺服控制器設(shè)計(jì).pdf》資料免費(fèi)下載
2023-10-25 09:10:400 步進(jìn)系統(tǒng)=步進(jìn)驅(qū)動(dòng)器+步進(jìn)電機(jī)。步進(jìn)電機(jī)由步進(jìn)驅(qū)動(dòng)器來驅(qū)動(dòng),相當(dāng)于驅(qū)動(dòng)電源,且它受外部的脈沖信號(hào)和方向信號(hào)控制(這里舉例是西門子PLC輸出脈沖),進(jìn)而控制步進(jìn)電機(jī)的旋轉(zhuǎn)角度和速度。
2023-10-30 11:30:52940 
Arduino是一種開放源代碼的電路板平臺(tái),它可以用于控制各種不同的電子設(shè)備,包括步進(jìn)電機(jī)。步進(jìn)電機(jī)是一種電動(dòng)機(jī),可以通過下達(dá)特定的指令來控制每個(gè)步進(jìn)的角度,從而使電機(jī)旋轉(zhuǎn)到指定的位置。在本文
2024-02-14 16:29:00319 步進(jìn)電機(jī)是一種在控制系統(tǒng)中常見的電機(jī)類型,它以步進(jìn)角度為單位進(jìn)行旋轉(zhuǎn),并且可以精確控制位置和速度。在許多應(yīng)用領(lǐng)域,如精密儀器、印刷設(shè)備和醫(yī)療設(shè)備中,步進(jìn)電機(jī)都得到廣泛使用。 為了實(shí)現(xiàn)對(duì)步進(jìn)電機(jī)的精確
2024-01-19 10:50:22503 步進(jìn)電機(jī)控制方法 步進(jìn)電機(jī)是一種將電信號(hào)轉(zhuǎn)化為機(jī)械轉(zhuǎn)動(dòng)的電動(dòng)機(jī),其輸出轉(zhuǎn)角是按照電脈沖控制信號(hào)的變化而變化的。步進(jìn)電機(jī)的控制方法有幾種常見的方式,包括全步進(jìn)控制、半步進(jìn)控制和微步進(jìn)控制。 全步進(jìn)控制
2024-01-22 17:18:18318 什么是步進(jìn)電機(jī)的細(xì)分控制?步進(jìn)電機(jī)為什么要細(xì)分,如何細(xì)分? 步進(jìn)電機(jī)的細(xì)分控制是一種控制技術(shù),通過對(duì)電機(jī)驅(qū)動(dòng)信號(hào)的細(xì)分來實(shí)現(xiàn)提高電機(jī)精度和減小振動(dòng)、噪音的目的。步進(jìn)電機(jī)是一種常用的電機(jī)類型,它通過
2024-02-18 09:39:32697
 電子發(fā)燒友App
電子發(fā)燒友App
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論