1.6KHz輸出幅度可調(diào)四種波形發(fā)生器
2016-07-10 17:16:48
51單片機(jī)定時(shí)計(jì)數(shù)器溢出率計(jì)算和串口的波特率之間的關(guān)系51單片機(jī)的四種串行口工作模式設(shè)置
2021-03-01 06:46:30
74hc259的datasheet中有四種工作模式,具體是怎么個(gè)情況看不大明白,求助大家。下圖為其真值表,
2014-07-15 13:00:48
格式是CAN2.0B協(xié)議新增加的特性。為使控制器設(shè)計(jì)相對(duì)簡(jiǎn)單,并不要求執(zhí)行完全的擴(kuò)展格式,對(duì)于新型控制器而言,必須不加任何限制的支持標(biāo)準(zhǔn)格式。但無(wú)論是哪種幀格式,在報(bào)文幀類(lèi)型 傳輸時(shí)都有以下四種不同類(lèi)
2014-04-27 15:16:02
格式是CAN2.0B協(xié)議新增加的特性。為使控制器設(shè)計(jì)相對(duì)簡(jiǎn)單,并不要求執(zhí)行完全的擴(kuò)展格式,對(duì)于新型控制器而言,必須不加任何限制的支持標(biāo)準(zhǔn)格式。但無(wú)論是哪種幀格式,在報(bào)文幀類(lèi)型 傳輸時(shí)都有以下四種
2014-04-18 16:36:30
控制器區(qū)域網(wǎng)(Controller Area Metwork,CAN)總線(xiàn)是一種多主機(jī)局部網(wǎng)。CAN總線(xiàn)規(guī)范已被國(guó)際標(biāo)準(zhǔn)化組織(ISO)制定為國(guó)際標(biāo)準(zhǔn)。C-AN總線(xiàn)屬于總線(xiàn)式串行通信網(wǎng)絡(luò),由 于采用
2011-07-12 15:33:41
文章目錄一.前言二. SN65HVD230三. 實(shí)戰(zhàn)應(yīng)用電路3.1 應(yīng)用電路3.2 Rs 引腳(PIN8)3.3 CAN總線(xiàn)的終端電阻四.芯片價(jià)格一.前言STM32F系列的單片機(jī)基本都集成了CAN
2021-09-14 07:18:37
目錄1、什么是CAN2、CAN協(xié)議的特點(diǎn)3、ISO11898標(biāo)準(zhǔn)下的物理層特征4、CAN 協(xié)議的5 種類(lèi)型幀4.1、總線(xiàn)仲裁介紹4.2、位時(shí)序5、STM32 CAN控制器簡(jiǎn)介5.1、標(biāo)識(shí)符篩選器
2021-08-19 08:02:04
STM32 CAN總線(xiàn)通信學(xué)習(xí)筆記(一)一、CAN總線(xiàn)簡(jiǎn)介CAN 是控制器局域網(wǎng)絡(luò)(Controller Area Network, CAN)的簡(jiǎn)稱(chēng)。CAN采用數(shù)據(jù)塊編碼的方式,數(shù)據(jù)塊根據(jù)幀的類(lèi)型
2021-08-19 06:04:04
主要問(wèn)幾個(gè)CAN總線(xiàn)物理層上的問(wèn)題1.CAN節(jié)點(diǎn)不接入總線(xiàn)網(wǎng)絡(luò)!!!(注意)(1).若此時(shí)對(duì)外輸出數(shù)據(jù),STM32 can總線(xiàn)輸出引腳RX/TX(接入CAN收發(fā)器之前),用示波器觀察,是何種電平情況
2018-11-28 08:54:40
STM32 CAN控制器,提供了28個(gè)可配置的篩選器組(F1僅互聯(lián)型才有28個(gè),其他的只有14個(gè)), STM32 CAN控制器每個(gè)篩選器組由2個(gè)32位寄存器組成(CAN_FxR1和CAN
2021-08-20 08:31:08
2使用共同的篩選器,總計(jì)28組。CAN2作為CAN1的從站,CAN1復(fù)位是否會(huì)影響CAN2?CAN總線(xiàn)關(guān)閉之后一定要自主恢復(fù),自動(dòng)脫離Bus-off狀態(tài),重復(fù)啟動(dòng)CAN總線(xiàn)錯(cuò)誤...
2021-08-19 09:29:00
STM32F103 CAN總線(xiàn)配置與通信小記總線(xiàn)概念在此只做非常簡(jiǎn)要的介紹 CAN 是Controller Area Network 的縮寫(xiě)(CAN BUS),具有布線(xiàn)簡(jiǎn)單、典型的總線(xiàn)型結(jié)構(gòu)、可最大
2021-08-20 07:48:36
關(guān)于STM32F103的GPIO口的介紹(聽(tīng)課筆記篇)這是IO口的基本形式以下就是四種輸入方式的介紹:(1)浮空輸入模式浮空輸入模式下,上拉下拉開(kāi)關(guān)是不會(huì)打開(kāi)的,電平從I/O口輸入,電平傳輸?shù)絋TL
2022-01-18 09:46:14
STM32 中的CAN總線(xiàn)模塊是具有故障監(jiān)測(cè)功能的就是CANx_SCE_IRQHandler這個(gè)用的很少,它叫CAN總線(xiàn)狀態(tài)改變中斷通過(guò)打開(kāi)這個(gè)中斷,配合代碼可以精確的監(jiān)測(cè)CAN總線(xiàn)的故障情況就是
2021-08-19 08:20:11
STM32可以直接連接can總線(xiàn),實(shí)現(xiàn)can功能嗎?可以用proteus做仿真嗎?
2018-06-17 08:30:59
月報(bào)最近學(xué)習(xí)了STM32的CAN總線(xiàn)協(xié)議,使用的是野火的開(kāi)發(fā)板 CAN 是Controller Area Network 的縮寫(xiě)(CAN BUS),具有布線(xiàn)簡(jiǎn)單、典型的總線(xiàn)型結(jié)構(gòu)、可最大限度的節(jié)約
2021-08-19 07:41:05
目錄:一、CAN通信原理1.CAN通信簡(jiǎn)介2.CAN通信優(yōu)點(diǎn)3.CAN總線(xiàn)物理層4.CAN報(bào)文種類(lèi)5.數(shù)據(jù)幀格式6.仲裁過(guò)程7.位同步二、STM32的CAN控制器1.功能特點(diǎn)2.STM32CAN架構(gòu)
2021-08-19 06:34:16
STM32芯片的GPIO一共有8種配置模式,對(duì)8種模式的理解如下1.四種輸入模式上拉輸入:在默認(rèn)狀態(tài)下,讀取的GPIO引腳為高電平下拉輸入:在默認(rèn)狀態(tài)下,讀取的GPIO引腳為低電平浮空輸入:配置成
2019-05-21 07:55:20
can總線(xiàn)stm32交通燈,1:CAN簡(jiǎn)介CAN是Controller Area Network,是一種串行的通信協(xié)議,有兩標(biāo)準(zhǔn):ISO11898、ISO11519-2,其中ISO11898是針對(duì)
2021-08-05 06:41:08
情況是這樣的,因?yàn)轫?xiàng)目中需要外接的串口設(shè)備很多,STM32F4的6個(gè)UART/USART已經(jīng)都被占用完了,如果想繼續(xù)接入串口設(shè)備,只能通過(guò)【can串口】轉(zhuǎn)換模塊來(lái)實(shí)現(xiàn),而且由于can總線(xiàn)支持N多
2021-08-19 07:14:58
stm32的can總線(xiàn)理解及應(yīng)用——程序?qū)?yīng)stm32f103系列CAN 是Controller Area Network 的縮寫(xiě)(以下稱(chēng)為CAN),是ISO國(guó)際標(biāo)準(zhǔn)化的串行通信協(xié)議。它的通信速度
2021-08-19 06:26:04
那個(gè)大神指導(dǎo)下,stm32的can總線(xiàn)咱還回模式先能不能測(cè)試接受中斷啊???我一開(kāi)通中斷就會(huì)死在發(fā)送函數(shù)里。
2015-07-16 11:03:08
本文中,小編將為大家介紹四種在LED供電當(dāng)中經(jīng)常使用的四種拓?fù)浣Y(jié)構(gòu)。感興趣的朋友快來(lái)看一看吧。 首先需要從了解轉(zhuǎn)換器的最小及最大輸出電壓入手。這只是將所有LED正向壓降與傳感電阻器電壓相加的總數(shù)
2018-10-10 15:07:41
四種主要的負(fù)電源軌生成方案如何選擇
2021-03-11 06:00:41
`這四種有什么區(qū)別?他們的工作原理分別是什么?求大牛們解答`
2015-07-09 17:47:20
四種常用的FPGA設(shè)計(jì)思想與技巧
2017-11-05 15:03:29
詳細(xì)介紹了電場(chǎng)耦合 電磁感應(yīng) 磁共振無(wú)線(xiàn)電波 這四種方式
2016-07-28 11:12:08
四種波形發(fā)生器
2020-03-11 08:14:27
針對(duì)A/D轉(zhuǎn)換中可能出現(xiàn)的誤差,主要分為以下四種情況,漂移誤差、線(xiàn)型比例誤差、非線(xiàn)性誤差、非單調(diào)性誤差。還有那些能夠引起AD轉(zhuǎn)換出現(xiàn)比較大的誤差類(lèi)別?
先說(shuō)AD轉(zhuǎn)換是怎么取值的,假設(shè)輸入信號(hào)0-3V
2024-01-30 14:19:21
FPGA 設(shè)計(jì)的四種常用思想與技巧FPGA設(shè)計(jì)的四種常用思想與技巧 討論的四種常用FPGA/CPLD設(shè)計(jì)思想與技巧:乒乓操作、串并轉(zhuǎn)換、流水線(xiàn)操作、數(shù)據(jù)接口同步化,都是FPGA/CPLD 邏輯設(shè)計(jì)
2012-08-11 10:30:55
FPGA設(shè)計(jì)的四種常用思想與技巧
2012-08-20 17:16:35
IO口的四種使用方法高阻態(tài)的典型應(yīng)用
2021-01-12 07:16:33
IO口的四種使用方法高阻態(tài)的典型應(yīng)用
2021-02-02 06:58:58
IO口的四種使用方法高阻態(tài)的典型應(yīng)用
2021-02-19 07:23:09
ModBus四種數(shù)據(jù)DI/DO/AI/AO是什么?
2021-11-02 07:14:17
PADS中有四種庫(kù)(暫且論是四種),元器件封裝庫(kù)(Decals),元件類(lèi)型(Part Type),和邏輯封裝庫(kù)(CAE),圖形庫(kù)(Lines)。簡(jiǎn)明點(diǎn)說(shuō)他們的關(guān)系,CAE是用在畫(huà)原理圖時(shí)候用
2015-03-06 10:35:50
聲明:本篇文章面向在已對(duì)SPI的四種時(shí)序有所了解的人我們采用SPI3模式以及將FPGA作從機(jī),STM32作主機(jī)的方式講解,在STM32控制部分采用的是半雙工模式,但其實(shí)半雙工與全雙工區(qū)別不大,稍加
2022-02-09 06:18:21
STM8定時(shí)器1的四種觸發(fā)同步是什么?
2021-11-24 07:19:46
與你分享濾波器分哪四種?濾波器分為低通、高通、帶通和帶阻濾波器四種:1、低通濾波器;允許信號(hào)中的低頻或直流分量通過(guò);抑制高頻分量或干擾和噪聲。2、高通濾波器;允許信號(hào)中的高頻分量通過(guò);抑制低頻或直流
2014-04-29 10:38:45
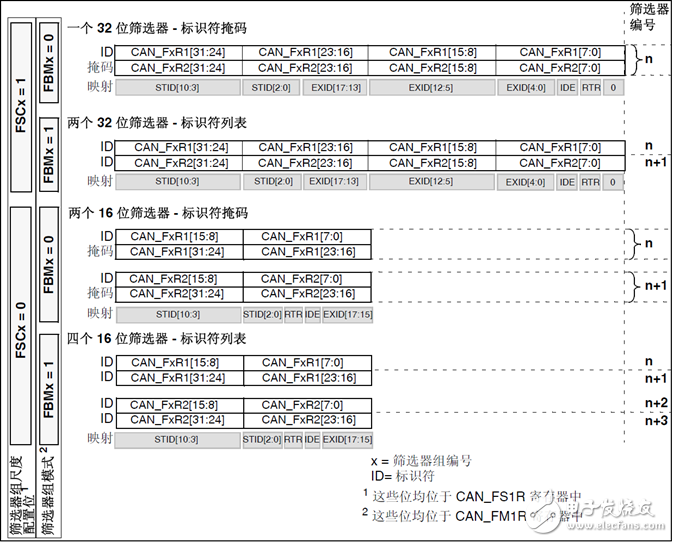
CAN共有28個(gè)篩選器組,每個(gè)篩選器可配置4種模式,分別是1個(gè)32位掩碼,2個(gè)32位標(biāo)識(shí)符,2個(gè)16位掩碼,4個(gè)16位標(biāo)識(shí)符。根據(jù)我32位的掩碼模式使用場(chǎng)景,也就是說(shuō)可以配置28個(gè)32位掩碼的篩選器
2024-03-21 07:18:54
你好任何人都可以解釋為什么四種 DDR 驗(yàn)證 BIST 測(cè)試類(lèi)型無(wú)法執(zhí)行并且顏色編碼指示“…………測(cè)試腳本中的錯(cuò)誤”?我能夠成功執(zhí)行 DDR 驗(yàn)證階段和其他四種 DDR 驗(yàn)證測(cè)試類(lèi)型(DMA 測(cè)試
2023-04-06 08:54:58
CAN 總線(xiàn)(Controller Area Network)是控制器局域網(wǎng)的簡(jiǎn)稱(chēng),是 20 世紀(jì) 80 年代初德國(guó) BOSCH 公司為解決現(xiàn)代汽車(chē)中眾多的控制與測(cè)試儀器之間的數(shù)據(jù)交換而開(kāi)發(fā)的一種
2018-12-13 14:26:31
UPS電源是較為常見(jiàn)的應(yīng)急電源系統(tǒng),其在市電正常與市電異常的情況下,工作方式也有所不同,以下介紹UPS電源的四種工作方式:正常運(yùn)行、電池工作、旁路運(yùn)行和旁路維護(hù)。1、正常運(yùn)行方式 UPS電源系統(tǒng)
2021-11-16 06:19:28
因?yàn)楣卷?xiàng)目需要,一直使用CAN總線(xiàn)控制整車(chē)電機(jī),目前發(fā)現(xiàn)的問(wèn)題:使用單片機(jī)總線(xiàn)數(shù)據(jù)CAN丟包。問(wèn)題描述:使用STM32單片機(jī)的時(shí)候,發(fā)送CAN報(bào)文,經(jīng)常會(huì)出現(xiàn)丟包的情況,而且現(xiàn)象非常明顯。而使
2021-08-19 08:19:22
使用STM32F103C8T6 + STM32CubeMX做項(xiàng)目時(shí)常見(jiàn)的四種問(wèn)題應(yīng)該如何解決?
2021-10-22 09:06:14
控制器GYXF3100-4XP。關(guān)于它們的啟動(dòng)方式,主要有四種:直接啟動(dòng)、星三角啟動(dòng)、自耦降壓?jiǎn)?dòng)、軟啟動(dòng)。那么,關(guān)于這四種啟動(dòng)方式,你知道多少呢?哪種啟動(dòng)方式呢?哪種啟動(dòng)方式比較經(jīng)濟(jì)實(shí)惠呢?哪種啟動(dòng)
2021-09-13 08:34:04
單片機(jī)四種輸入模式 MCU輸入模式有浮空、上拉、下拉、模擬輸入這四種模式,如果采用上拉或者下拉模式輸入,豈不是把真實(shí)的信號(hào)強(qiáng)行變成電源VCC或者GND了?這四種模式分別在什么場(chǎng)合下使用?這個(gè)對(duì)于嵌入式軟件工程師來(lái)說(shuō)很重要
2021-08-24 16:19:27
單片機(jī)最常用的四種燒寫(xiě)方式是什么?
2021-09-27 07:53:43
變頻器主要支持四種模式:無(wú)PG的V/F模式,有PG的V/F模式,無(wú)PG的矢量控制模式,有PG的矢量模式。 PG 是指旋轉(zhuǎn)編碼器。這四種控制模式主要的技術(shù)指標(biāo)如下表所示。控制模式無(wú)PG VF控制有PG
2021-09-03 06:57:46
變頻器容量的選定由很多因素決定,如電動(dòng)機(jī)容量、電動(dòng)機(jī)額定電流、加速時(shí)間等,其中最基本的是電動(dòng)機(jī)電流。下面分四種不同情況,就如何選定通用型變頻器容量做一些簡(jiǎn)單介紹。1、驅(qū)動(dòng)一臺(tái)電動(dòng)機(jī)對(duì)于連續(xù)運(yùn)轉(zhuǎn)
2018-08-21 16:01:13
需要四個(gè) 100 nF 的小電容。SD 卡模塊采用四線(xiàn)制 SPI 總線(xiàn)與 SD 卡相連接。2.2 CAN 從站硬件設(shè)計(jì)從站電路如圖 3 所示,主要有電源模塊、STM32 模塊,CAN 收發(fā)器模塊
2020-05-30 08:00:00
說(shuō)明:這是我的畢業(yè)設(shè)計(jì),基于STM32的CAN總線(xiàn)通信節(jié)點(diǎn)設(shè)計(jì)。用的是STM32F103微控制器,LCD1602液晶顯示,MQ-4甲烷氣體傳感器,CTM1050CAN收發(fā)器。但是甲烷傳感器限于條件
2021-07-19 07:18:56
大數(shù)據(jù)所帶來(lái)的四種思維方式的轉(zhuǎn)變
2019-08-12 11:37:02
在multisim中我已經(jīng)通過(guò)滯回電壓比較器,積分電路,濾波,及cmos反相器分別形成了方波,三角波,正玹波及矩形波,那么我現(xiàn)在要通過(guò)一種方式將這四種波形可以四選一?
2020-05-16 22:22:56
未來(lái)10年全球移動(dòng)業(yè)務(wù)將快速增長(zhǎng),本文分析了推動(dòng)移動(dòng)業(yè)務(wù)增長(zhǎng)背后的原因,提出通過(guò)技術(shù)演進(jìn)、增加IMT頻譜、提高網(wǎng)絡(luò)密度和加大業(yè)務(wù)分流四種途徑解決未來(lái)巨大的網(wǎng)絡(luò)壓力。綜合使用這四種手段才能滿(mǎn)足未來(lái)移動(dòng)業(yè)務(wù)的需求。
2019-06-17 07:37:22
CAN總線(xiàn)有哪些優(yōu)點(diǎn)?CAN總線(xiàn)的工作原理是什么?怎樣去設(shè)計(jì)一種基于STM32F4的CAN總線(xiàn)多節(jié)點(diǎn)通信系統(tǒng)?
2021-06-30 07:41:27
為滿(mǎn)足成本、功耗和制造工藝的需求,我們提出如下四種發(fā)送電路架構(gòu):極性反饋(Polar Feedback)“Lite”、極性反饋、極性開(kāi)環(huán)、直接調(diào)制(零差)。
2019-08-22 06:54:37
被稱(chēng)為“最后一公里”的接入網(wǎng),一共有四種結(jié)構(gòu),分別是總線(xiàn)形結(jié)構(gòu)、環(huán)形結(jié)構(gòu)、星形結(jié)構(gòu)和樹(shù)形結(jié)構(gòu),下面就簡(jiǎn)單地介紹一下這四種結(jié)構(gòu)的優(yōu)缺點(diǎn)。一是總線(xiàn)形結(jié)構(gòu)。指以光纖作為公共總線(xiàn)、各用戶(hù)終端通過(guò)耦合器與總線(xiàn)
2020-12-01 16:11:44
無(wú)線(xiàn)充電的起因無(wú)線(xiàn)充電的“歷史”無(wú)線(xiàn)充電的四種方式及比較無(wú)線(xiàn)充電系統(tǒng)的元件和開(kāi)發(fā)工具推薦
2021-01-27 07:06:05
數(shù)模題目:圖像去噪中幾類(lèi)稀疏變換的矩陣表示求幫助離散余弦變換,離散小波變換,主成分分析 和奇異值分解這四種的MATLAB編程程序
2015-05-15 18:34:34
主機(jī)寫(xiě) 從機(jī)讀 主機(jī)讀 從機(jī)寫(xiě)數(shù)據(jù)輸出是將數(shù)據(jù)送到那兩根線(xiàn)上,數(shù)據(jù)采樣是將數(shù)據(jù)從總線(xiàn)上讀取到主從機(jī)中。74595芯片對(duì)應(yīng)的又是哪一種模式呢?軟件模擬SPI中SCK上升沿和下降沿與數(shù)據(jù)不能同時(shí)變化。兩者總有先后順序。四種模式又如何理解呢?
2015-12-28 22:51:04
SQL的四種連接-左外連接、右外連接、內(nèi)連接、全連接
2020-03-20 11:18:14
藍(lán)橋杯單片機(jī)組簡(jiǎn)易問(wèn)題與代碼(5)今日問(wèn)題:獨(dú)立鍵盤(pán)的四種使用方式程序僅供參考,鼓勵(lì)大家獨(dú)立完成#include #define uint unsigned int#define uchar
2022-01-12 06:54:43
mathlib_c66x_3_0_1_1:請(qǐng)問(wèn)大神們,MATHLIB的庫(kù)函數(shù)為什么每個(gè)都有四種?比如說(shuō)單精度的Atansp就有這四種:(1)floatatansp(float a)(2
2018-07-24 07:39:17
汽車(chē)CAN總線(xiàn)基礎(chǔ)詳解與基本應(yīng)用情況與實(shí)例分享
2016-03-22 15:50:11 0
0 [第13講] CAN總線(xiàn)(124分鐘),由何強(qiáng)主講.本課主要講解:(1).典型CAN總線(xiàn)網(wǎng)絡(luò)系統(tǒng)結(jié)構(gòu)詳解;(2).CAN總線(xiàn)的報(bào)文傳輸和結(jié)構(gòu)講解;(3).CAN總線(xiàn)特點(diǎn)講解;(4).STM32中的CAN控制器;(5).CAN控制器的寄存器詳解;(6).CAN控制器的庫(kù)函數(shù)詳解.
2016-10-09 16:14:19 1644
1644 基于STM32單片機(jī)的CAN總線(xiàn)分析儀的設(shè)計(jì)
2017-01-24 16:54:2441 主要介紹STM32上的CAN的功能。
2017-12-20 17:53:0115 為了弄清CAN總線(xiàn)是否完好工作,必須觀察總線(xiàn)上的通信情況。在這種情況下不需要分析單個(gè)位,而只需要觀察CAN總線(xiàn)是否工作。示波器測(cè)量說(shuō)明: “CAN總線(xiàn)很可能無(wú)故障工作”。
2018-11-28 17:22:418746 本文檔的主要內(nèi)容詳細(xì)介紹的是STM32的CAN總線(xiàn)例程合集免費(fèi)下載。
2019-09-25 08:00:0057 CAN(Controller Area Network)即控制器局域網(wǎng),屬于工業(yè)現(xiàn)場(chǎng)總線(xiàn)的范疇,通常稱(chēng)為CAN-bus,即CAN總線(xiàn),它是目前國(guó)際上應(yīng)用最廣泛的開(kāi)放式現(xiàn)場(chǎng)總線(xiàn)之一,與一般的通信總線(xiàn)
2020-01-15 08:00:007 功能,讓每個(gè)節(jié)點(diǎn)對(duì)報(bào)文有選擇性地做出響應(yīng)。 總線(xiàn)使用不歸零位填充。模塊以線(xiàn)與邏輯連接到總線(xiàn):如果只有一個(gè)節(jié)點(diǎn)向總線(xiàn)傳輸邏輯0,那么不管有多少個(gè)節(jié)點(diǎn)向總線(xiàn)傳輸邏輯1,整個(gè)總線(xiàn)都處于邏輯0狀態(tài)。 CAN標(biāo)準(zhǔn)定義四種不同的報(bào)文類(lèi)型。報(bào)文使用
2020-04-03 15:32:2213499 基于多STM32和CAN總線(xiàn)的分布式電動(dòng)護(hù)理床控制
2021-06-30 15:15:0112 CAN總線(xiàn)因強(qiáng)大的抗干擾和糾錯(cuò)重發(fā)機(jī)制,被廣泛應(yīng)用于新能源汽車(chē)、軌道交通、醫(yī)療、煤礦、電機(jī)驅(qū)動(dòng)等行業(yè),但在CAN總線(xiàn)遇見(jiàn)不同程度的問(wèn)題時(shí),工程師該如何有效進(jìn)行CAN-bus總線(xiàn)的安全保障呢? 在紛雜
2021-08-04 10:25:261524 目錄:一、CAN通信原理1.CAN通信簡(jiǎn)介2.CAN通信優(yōu)點(diǎn)3.CAN總線(xiàn)物理層4.CAN報(bào)文種類(lèi)5.數(shù)據(jù)幀格式6.仲裁過(guò)程7.位同步二、STM32的CAN控制器1.功能特點(diǎn)2.STM32CAN架構(gòu)
2021-11-19 12:21:0884 HAL庫(kù)使用CAN總線(xiàn)CAN.cCAN.cCAN_HandleTypeDef hcan1;void CAN1_User_Init(CAN_HandleTypeDef* hcan );/* CAN
2021-12-02 17:51:0512 使用STM32Cube MX為STM32 CAN總線(xiàn)快速上手教程_HAL庫(kù)_CAN協(xié)議_STM32前言博主也是剛接觸CAN協(xié)議的新手,如有不對(duì)的地方歡迎交流本文旨在使用STM32Cube MX快速
2021-12-04 17:36:0533 說(shuō)明:這是我的畢業(yè)設(shè)計(jì),基于STM32的CAN總線(xiàn)通信節(jié)點(diǎn)設(shè)計(jì)。用的是STM32F103微控制器,LCD1602液晶顯示,MQ-4甲烷氣體傳感器,CTM1050CAN收發(fā)器。但是甲烷傳感器限于條件
2021-12-24 19:30:1046 車(chē)用總線(xiàn)就是車(chē)載網(wǎng)絡(luò)中底層的車(chē)用設(shè)備或車(chē)用儀表互聯(lián)的通信網(wǎng)絡(luò)。目前,有四種主流的車(chē)用總線(xiàn):CAN總線(xiàn)、LIN總線(xiàn)、FlexRay總線(xiàn)和MOST總線(xiàn)。
2022-11-18 12:03:202983 CAN基礎(chǔ)知識(shí)介紹文中介紹了CAN協(xié)議的基礎(chǔ)知識(shí),以及STM32F4芯片的CAN控制器相關(guān)知識(shí),下面將通過(guò)實(shí)例,利用STM32CubeMX圖形化配置工具,來(lái)實(shí)現(xiàn)CAN通訊的環(huán)回測(cè)試
2023-01-04 15:23:151787 CAN基礎(chǔ)知識(shí)介紹文中介紹了CAN協(xié)議相關(guān)的基礎(chǔ)知識(shí),以及STM32F4芯片的CAN控制器相關(guān)知識(shí),下面將通過(guò)實(shí)例,利用STM32CubeMX圖形化配置工具,并配合CAN盒,來(lái)實(shí)現(xiàn)CAN通訊的中斷收發(fā)測(cè)試
2023-01-16 17:17:443960 在CAN總線(xiàn)浪涌靜電保護(hù)中,PESD1CAN、PESD2CAN、HDW24M2T-B、DW24M2T-B-S這四種TVS二極管陣列是市場(chǎng)中應(yīng)用比較多的電路保護(hù)器件,市場(chǎng)應(yīng)用成熟、穩(wěn)定、高可靠性。具體選用哪種TVS二極管陣列為CAN總線(xiàn)安全保駕護(hù)航,還需在技術(shù)的指導(dǎo)下完成。
2021-12-22 11:13:441725 
您是否遇到需要使用CAN總線(xiàn),但MCU沒(méi)有集成CAN總線(xiàn)控制器的情況?您又是否遇到MCU的CAN口資源不夠的情況?一顆CSM330A芯片能解決您的問(wèn)題,本文將帶您了解CSM330A的優(yōu)勢(shì)
2023-09-04 16:41:46644 
電子發(fā)燒友網(wǎng)站提供《基于STM32單片機(jī)的單線(xiàn)CAN總線(xiàn)隔離中繼器.pdf》資料免費(fèi)下載
2023-11-06 10:03:161 。 CAN總線(xiàn)共模電感的定義和作用 CAN總線(xiàn)共模電感是一種用于CAN總線(xiàn)通信系統(tǒng)中的電感元件,用于解決通信線(xiàn)上的共模干擾問(wèn)題。在CAN總線(xiàn)通信中,常常會(huì)出現(xiàn)共模干擾的情況,即兩根信號(hào)線(xiàn)上的電壓同時(shí)增大或減小,導(dǎo)致節(jié)點(diǎn)無(wú)法正確解讀信息。而CAN總
2024-01-05 13:42:34748 高速CAN總線(xiàn)和低速CAN總線(xiàn)的特性 高速CAN總線(xiàn)和低速CAN總線(xiàn)是兩種常見(jiàn)的CAN總線(xiàn)類(lèi)型。它們?cè)跀?shù)據(jù)傳輸速率、最大電纜長(zhǎng)度、適用場(chǎng)景等方面存在一些差異。下面將詳盡、詳實(shí)、細(xì)致地介紹這兩種CAN
2024-01-31 14:09:01497
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論