并聯機器人的體積相對較小,用于食品、藥品包裝以及電子器件裝配。并聯機器人具有出色的精度和高速性能,使其非常適合這些應用。這類機器人的此種并聯運動學特性使得快速、準確地運動成為可能,也使其擁有了與鉸接
2023-05-24 18:36:51 7965
7965 
3D圖形控件設置并聯機器人(如Delta機構)各兩件間的對象關系,怎么設置啊有沒有人知道啊?目前見到的都是串聯型機構。
2020-03-28 21:42:43
`▼并聯機器人迅速將糖豆放入瓶里 仔細觀看我們可以發現,相同顏色的糖豆放在一個瓶里 并聯機器人這類設備主要用于精密緊湊的應用場合,競爭點集中在速度、重復定位精度和動態性能等方面。 并聯機器人快速拾取枕包牛奶,放入指定位置 并聯機器人快速準確拾取物體`
2016-09-14 11:37:02
有沒有機器人比較全的資料
2017-03-21 12:35:21
請各位大神指導,移動式機器人是怎么做EMC保護的,機器人是鋰電池供電,所以就不能接大地了,那么對機器人的干擾是通過何種方式來釋放或轉移的?
2016-07-26 13:33:14
我覺得現在是時候討論一些更有趣的話題,今天的話題是介紹工業機器人、協作機器人和移動機器人。我想每個人都知道機器人是什么。機器人是可怕的大型機器,通常需要關在籠子中,其功能安全要求一般涉及門聯鎖裝置
2018-10-30 11:33:11
在前一篇文章中講了機器人與編程的區別,但總感覺講的比較空泛,這篇文章繼續講講那些區別。計算機編程和機器人編程最大的區別就是一個是控制虛擬的,一個是真實世界的東西。計算機編程,你控制一個角色直走100
2021-09-01 07:12:05
機器人的運動原理還是屬于最基本的簡單機械。機器人運動主要是依靠什么裝置?有些什么裝置是機器人用的比較多的?
2015-02-03 11:22:01
現在想做機器人圖像識別方面的研究,有問題請教大家,比如說:現在有十種瓶子,機器人能識別我指定的瓶子,并把它從A位置移動到B位置,關鍵是如何識別呢,不是很清楚,求大神指點!在此感激不盡!
2019-11-04 09:02:57
想弄一個vi可以動態顯示機器人的姿態,但不知道有什么函數可以引入機器人的模型,幫幫忙,謝謝。
2012-02-11 17:25:22
移動機器人有沒有推薦的MCU,萌新求大佬幫助
2020-11-03 11:41:09
各位論壇前輩你們好,我是一名在校的即將升入大二學生,專業課暫時只學了c,電路分析基礎和工程制圖。我跟另外4個同學正在參加學校的機器人比賽,在機器人創意表演方面,就突發奇想,是否能做一個可以彈簡單
2017-05-22 17:09:06
上是醬紫的。被稱為“聯機表單”,通過輸入或者選擇就可以實現運動指令的編輯機器人就是通過這些運動指令記住自己需要到達的目標位置的。我們來學習一下怎么添加一個這樣的運動指令前提條件? 已設置運行方式 T1?...
2021-09-01 06:13:36
機器人有哪些種類?大家來說說
2014-12-25 10:01:32
機器人有哪些類型?
2021-06-18 06:41:57
現在的機器人使用的電機多是什么品牌的呀,還是自己根據需求定制的呀?
2016-03-15 10:37:57
機器人的優缺點有哪些?機器人是由哪些部分組成的?
2021-10-11 07:51:29
機器人的定義是什么?機器人優點和缺點是什么?機器人是由哪些部分組成的?工業機器人的應用有哪些?
2021-07-05 06:48:21
安靜高效的機器人正在接管——阻止它們已經太遲了。不,這不是機器人世界末日另一個可怕的故事。這是關于您下一設計硬件預算和規劃面臨威脅的問題。雖然您無法阻礙技術變革,但是您可以預測其影響。
2019-07-17 08:08:16
、KUKA、Yaskawa Motoman、FANUC2.2.1 本體結構本體結構分類:不同機器人建模控制的本質區別關節型機械臂:串聯垂直多關節6軸機器人SCARA機械臂:笛卡爾機械臂:Delta并聯機械臂:雙平行四邊形機械臂(碼垛機器人)其他類型機械臂:圓柱形、球坐標符號表示機器
2021-09-08 07:44:15
機器人的移動通常是從管理機器人總體任務進度的中央處理器發出位置變化請求時開始的。導航系統通過制定行程計劃或軌跡以開始執行位置變化請求。行程計劃需考慮可用路徑、已知障礙位置、機器人能力及任何相關的任務目標。
2019-09-10 10:44:32
`據傳奧地利發生了一起機器人自殺事件,自殺的機器人叫Roomba 760。據說這位機器人自殺的原因是忍受不了繁重又無限重復的清潔工作,而選擇了***。***之后是這個樣子滴是不是渣都木有了`
2016-01-05 11:07:53
相比于之前的機器人,NAO機器人穿上人類的服裝,那就像是一個真人出現在我們面前似得,NAO機器人的四肢設計的非常的靈活,具有多個自由度的身體,使得NAO機器人能夠靈敏的行走以及參加一些活動。NAO
2015-02-13 15:43:24
集中于串聯式的工業機器人的理論與工程應用。雖然串聯機器人具有諸多優點,但同時也有些問題函待解決。本文介紹了一種新型的串并聯噴涂機器人的結構設計,并對其運動學、誤差建模、誤差補償和軌跡規劃進行了分析
2017-07-13 16:03:16
并聯機構是由多個并行鏈構成的閉環機械系統。相對于串聯機構,]研究的并聯機構如圖1 所示。A1~A4、B1~B4 為球副, R1~R8 為轉動副, L1~L4 為電動推桿, 實現伸縮運動。A1A2A3A4 組成了靜平臺, B1B2B3B4 為動平臺。
2019-07-22 04:30:00
就是說,一個機器人發指令,一堆機器人向這個機器人靠攏,可以通過zigbee么?或者是別的什么傳感器?先謝過了!
2012-09-26 18:50:15
ABB蜘蛛機器人六軸用的程序開發都一樣嗎?上位機與機器人和PLC都是如何進行通訊的?
2021-09-01 07:39:13
` 山東昊威機器人有限公司的書法機器人在展會上可謂是吸睛神器,小伙伴們紛紛前來圍觀,這不,國際友人都不禁為我們昊威書法機器人手動點贊啦!!!厲害啦我的機器人。`
2017-08-11 11:48:54
什么是機器人控制系統?機器人的運動控制系統包含哪些方面?機器人控制系統的基本功能有哪些?
2021-10-11 09:38:12
清潔機器人是服務機器人的一種,所謂服務機器人是指自主或半自主的、從事非生產活動、能完成有益于人類健康的服務工作的機器人。家庭清潔機器人集機械、電子、傳感器、計算機、控制、機器入技術、人工智能等諸多
2019-09-05 06:56:37
工業機器人的四大特征是哪些?工業機器人是由哪些部分組成的?工業機器人是怎樣進行劃分的?
2021-10-11 09:10:17
求一套寫字機器人的程序,用arduino編寫的。怎么實現
2020-10-17 15:20:25
本文以6- PPPS并聯機器人為控制對象,以NI公司的系列軟硬件產品為基礎,依托國家自然基金(No. 30770538)的支持,快速開發了此并聯機器人的開放式數字控制系統。
2021-05-12 06:38:22
`華南機器人應用培訓中心擁有各種設備,開展各種不同的機器人培訓班。打造各種工業現場常見的機器人工作站,現開展KUKA、發那科、三菱、ABB、愛普生工業機器人培訓對外招生。 一、認識機器人技術:工業
2015-09-02 14:03:18
各位大神,現在小弟想用LabVIEW控制安川機器人,可是通過調用motocom32的DLL不能和機器人通信,聽說LabVIEW不能二次開發安川機器人,請問有熟悉安川機器人的高手指點一二,不勝感激!
2014-11-10 12:29:06
如題。在論壇有看到家用機器人的2014年度十大款類型。比較感興趣,不知道有沒有大神了解比較全面的家用機器人知識?
2015-02-11 11:16:00
在物流搬運行業,拳頭機器人由于其獨特的并聯結構,常用于高速整列、裝箱等場合。其中,拳頭機器人的視覺線跟蹤技術正得到廣泛的應用,如下圖所示:
2020-08-06 06:30:31
關于ros智能機器人,就是一個寫智能機器人代碼的一個虛擬機,
2021-10-13 19:20:16
吸塵機器人作為服務機器人領域的一個新產品,結合了機器人和吸塵器技術,能在無人看守情況下輕松地完成室內環境的吸塵等清潔工作,越來越受到人們的歡迎。
2020-03-18 06:18:37
智能監控機器人是近年來機器人應用工程中一項前沿性的題目,智能化探測小車是智能行走機器人的一種。智能監控機器小車就是針對上述情況,在參考了目前大多數智能機器人的基礎上,以降低成本為原則設計的。小車具備
2019-10-14 07:37:52
隨著人工智能技術的發展,機器人已經開始接管人類的部分工作,例如快遞、工廠作業、餐廳服務員甚至媒體編輯---紐約時報就聘請了一位機器人做總編。未來,機器人可以介入半導體設計開發嗎?例如,機器人可以進行FPGA開發嗎?
2019-10-10 06:33:18
我是新人,求幫助啊,明天需要提交輪式機器人應用的報告,求大神給點建議,可用輪式機器人應用于那些方面,要求實際可行,應用于生活,農業,軍事都可以,謝謝啦
2013-04-17 16:32:16
積累和放大、位置反解容易等優點, 與串聯機構在應用上形成了互補關系。目前, 對并聯機器人研究較多的是6 自由度( 6DOF) 并聯機器人, 但在某些場合2~5 個自由度即可滿足使用要求, 這類少于6 自由度
2019-06-02 08:00:00
介紹DELTA并聯機器人的基礎知識與系統設計原理,并結合ABB和FANUC機器人,介紹了工業生產中的常用并聯機器人機型與編程操作。本書依據學習者的認知規律,側重工業機器人的技術要點,通過相關典型實例講解
2018-10-29 17:03:22
江智黨建機器人是經過多年的市場沉淀 ;現已可以提供系統 全方位的黨建機器人服務
2022-06-21 07:59:59
根據平面微小并聯機器人系統的功能設計要求,在機器人系統的機構、控制分析的基礎上,于設計階段引入正逆向求解,適當的限定條件保證了坐標變換和運動軌跡規劃的唯一性,
2010-03-03 15:13:35 13
13 基于LabVIEW和PXI平臺設計的6-DOF并聯機器人控制系統
應用成熟的NI系列產品快速構建一套功能完善、性能優越、人機界面友好的開放式多自由度并聯機
2010-05-13 10:37:512168 
分析了3-RPR并聯機器人工作空間的影響因素,以支腿長度約束、支腿與動平臺交匯條件以及支腿與動平臺夾角限制為約束條件,并采用快速極坐標搜索法確定了3-RPR并聯機器人的工作空間。
2012-02-08 15:49:3637 芯海互聯機器人論壇演講
2016-12-26 15:57:5213 基于OpenMP的Stewart并聯機器人控制系統_李昂
2017-03-19 19:12:424 并聯驅動機器人比傳統的串聯機器人具有較高的剛度和精度,較高的承載與強度之比,而且驅動方便。但是并聯機構缺乏串聯機構工作空間相對比較大的特點,其工作空間往往比較小,以至于不適合工作空間較大的工業機器人
2017-10-14 12:08:064 并聯驅動機器人比傳統的串聯機器人具有較高的剛度和精度,較高的承載與強度之比,而且驅動方便。但是并聯機構缺乏串聯機構工作空間相對比較大的特點,其工作空間往往比較小,以至于不適合工作空間較大
2017-10-17 15:06:004 通過與傳統的串聯機器人的比較,分析了并聯機器人的特點。介紹了并聯機器人在運動模擬器、并聯機床。工業機器人、微動機構、醫用機器人、操作器方面的應用,指出了并聯機器人研究面臨的幾個主要問題。 1并聯機器人
2017-10-17 15:22:3610 并聯機器人相對于目前廣泛應用的串聯機器人來講,具有剛度強、精度高、自重負荷比小、速度高等顯著的優點;但也有其不足之處,如同樣的結構尺寸,并聯機器人的工作空間小,存在桿件空間的干涉、奇異
2017-10-21 10:16:5611 理想的少自由度并聯機構的所有分支最好具有完全相同的結構,保持結構的對稱,以滿足各向同性的要求。以單開鏈支路為單元,提出了一種新型的對稱的少自由度的并聯機器人機構。研究結果表明,該機構的運動平臺具有
2017-10-23 16:24:5015 采用分散控制策略和非線性 P ID 控制算法, 實現 6 自由度并聯機器人的高精度軌跡跟蹤控制。該非線性 P ID 控制器由兩個二階非線性微分跟蹤器提供高質量的微分信號, 并采用非線性組合形成控制
2017-11-08 16:33:4613 機器人技術發展到現在,雖然已經得到了突飛猛進的進步,但是對于并聯機器人運動學正解的封閉解問題依然是機器人技術的瓶頸,在實際應用中采用的廣義幾何法和方程組的數值解法等,不但推導過程非常復雜,而且在求解
2017-12-01 16:08:452 對機器人進行相應的優化設計可以使機器人具有更好的結構性能與工作性能。以一種三自由度冗余驅動混聯機器人為研究對象,對該機器人尺寸參數無量綱化并分析該機器人可達的工作空間,進而在混聯機器人工作空間中找出
2018-01-05 14:24:191 為了提高冗余并聯機器人的控制精度,本文針對二自由度冗余驅動并聯機器人,基于并聯機器人同步耦合誤差控制理論,提出了一種非線性同步控制方法。首先,利用李雅普諾夫穩定性理論,對提出的控制方法進行穩定性
2018-04-24 15:47:080 目前,國際國內大部分并聯機器人市場基本上由發那科、愛德普、ABB等企業占據,國產化率基本穩定在25%左右。在外資品牌加快對中國并聯機器人市場布局的同時,國產品牌也不甘示弱,憑借性價比的優勢和新的應用領域的開拓,國產并聯機器人或將率先和外資品牌展開較量。
2018-08-29 14:10:00632 說到工業機器人,一般人想到的其實是那種單獨的機械臂,圍繞著杠桿和關節進行旋轉作業。這種機器人被稱為串聯機器人。辰星的阿童木機器人,則是工業機器人家族的另一極,并聯機器人。
2018-08-22 15:30:122181 積累和放大、位置反解容易等優點, 與串聯機構在應用上形成了互補關系。目前, 對并聯機器人研究較多的是6 自由度( 6DOF) 并聯機器人, 但在某些場合2~5 個自由度即可滿足使用要求, 這類少于6 自由度
2018-10-07 10:57:005510 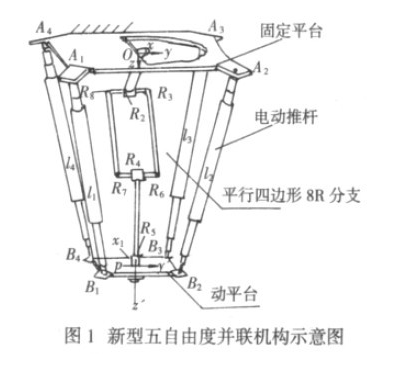
1992年,我國第一臺六自由度并聯機器人樣機研制成功,2012年,隨著ABB專利技術解禁,企業開始批量進入,并聯機器人商業化速度加快,6年過去,如今的并聯機器人市場又如何?
2018-10-25 08:42:254519 
1992年,我國第一臺六自由度并聯機器人樣機研制成功,2012年,隨著ABB專利技術解禁,企業開始批量進入,并聯機器人商業化速度加快,6年過去,如今的并聯機器人市場又如何?
2018-11-03 11:08:324910 在新松機器人智能制造產業園的車間里,新松為雙匯股份研發生產的并聯機器人擺腸機系統正在緊張的出廠調試。
2018-11-30 14:29:023124 作為并聯機器人繼續發展與創新的一個重要方面,拖動示教的應用將為并聯機器人調試技術趨向快速、簡便的方向發展。秉承不斷創新突破自我的勃肯特,在11月正式通過拖動示教在并聯機器人上的內部測試,實現該項技術在并聯機器人應用的零突破。
2018-12-07 17:14:081206 并聯機器人,英文名為Parallel Mechanism,簡稱PM,可以定義為動平臺和定平臺通過至少兩個獨立的運動鏈相連接,機構具有兩個或兩個以上自由度,且以并聯方式驅動的一種閉環機構。
2019-01-07 16:17:1010056 并聯機器人,是一種通過至少兩個獨立運動鏈連接動、靜平臺,具有多個自由度且采用并聯方式驅動的閉環機構。該種機器人具有速度快、柔性強、剛度高、質量輕等優勢,在機床、食品、醫藥、電子、物流等領域具有廣泛應用,其與串聯機器人共同組成了工業機器人的完整形態。
2019-01-24 09:26:28930 從外界來看,并聯機器人僅僅是非常細分的小眾領域,甚至將其稱為“暫時被國際廠家遺忘的角落”,不過在機器人行業整體增長不及預期的2018年,很多國產并聯機器人廠家在出貨量方面卻取得了可喜的成績。
2019-03-08 09:15:59639 近年來,隨著同行業內各個企業之間的競爭形勢日益激烈,人力成本的不斷上升,越來越多的傳統制造企業愿意把更多工業機器人引入工廠,進一步提升工業生產效率,促進產業結構的智能化調整。在這個過程中,并聯機器人
2019-03-23 10:50:186966 并聯機器人(DELTA)在上世紀90年代才真正引起廣泛注意,具有剛度高、速度快、柔性強、重量輕等優點,與串聯機器人一起構成工業機器人的重要部分。在食品、醫藥、電子等輕工業中應用最為廣泛,在物料的搬運
2019-05-17 14:55:373577 
據GGII數據統計,以中國大陸的市場為例,2014年并聯市場銷售約為620臺,2015年銷售約為970臺,2016年銷售約為1100臺,2017年銷售約為2790臺,2018年銷售約為3650臺,年均以50%的增速發展,因此初步預計2019年并聯機器人市場約為5800臺,機器人并聯市場正當其時。
2019-08-18 09:42:34614 
并聯機器人在上世紀的90年代就已經有所應用了,主要在醫藥、電子等輕工業使用作為廣泛,并聯機器人有著承載能力大;精度高;占用空間小;速度快;耐磨損等特點。這對于需要高精度的工業生產來說是個很好的選擇。
2019-10-28 17:18:535485 2019年6月,勃肯特正式發布第一款“雙臂結構”的并聯機器人——Phantom(幻影)-1200,也同時將并聯機器人“雙臂結構”概念首次帶入到并聯機器人產品中,從此,勃肯特進入了并聯機器人結構全新升級階段。
2019-11-14 14:42:42734 12月13日勃肯特正式發布旗下“雙臂結構2.0”并聯機器人Wraith-1200。
2019-12-13 14:55:47871 和所有新生事物一樣,并聯機器人在發展初期也存在著眾多的困難和限制因素,影響并聯機器人的持續高速發展。
2019-12-26 15:42:21634 并聯機器人和傳統工業用串聯機器人在哲學上呈對立統一的關系,和串聯機器人相比較,并聯機器人具有以下特點口:無累積誤差,精度較高;
2020-03-11 16:12:509 目前來看,并聯機器人基數尚小,相較于傳統串聯機器人市場,參與的玩家不多,國際企業包括ABB、發那科、博力實、歐姆龍等,中國企業包括勃肯特、阿童木、華盛控、李群等。高工產研機器人研究所(GGII)數據
2020-06-21 09:02:274394 作為工業機器人的分類之一,并聯機器人市場規模相對較小,專注并聯機器人的生產企業數量也較少,但是其在航空、金屬加工、食品等行業的市場占有率并不低。 2019年全球經濟形勢動蕩較大,影響了汽車和3C行業
2020-09-25 15:11:281951 2012年,隨著ABB專利解禁,國產并聯機器人逐步發展起來;2018年,全球并聯機器人銷量突破1.6萬臺;2019年,中國并聯機器人廠商數量超過60家,并聯機器人市場的發展速度堪比其工作運行
2020-09-25 15:38:231179 。 協作機器人一般都是形容單臂型本體,很少在并聯結構上出現,這種產品的難度在于機械結構和算法區別于以往并聯產品,特別是原來安裝一臺本體的空間,現在可以安裝兩臺,空間不變的情況下,效率提升50%,速度上遠遠高于人類的雙手。 該協作并聯機器人
2020-09-25 16:29:431981 在近日舉行的上海工博會期間,高工機器人產業研究所(GGII)分別攜手勃肯特、斯坦德、節卡機器人3家公司發布了《2020年并聯機器人產業發展藍皮書》(以下簡稱《并聯機器人藍皮書》)、《2020年自主
2020-09-27 14:02:482188 ABB并聯機器人,目前主要由ABB在上海的工廠生產。此外,2018年,ABB宣布斥資1.5億美元在上海建造機器人工廠,預計將于2020年底投入運營,相信在機器人制造成本上會有優勢。當然,ABB并聯機器人一般需要外配視覺,視覺成本比較高,加之較高的品牌溢價,IRB 360在市場上的售價也長期居高不下。
2020-10-12 09:38:302662 10月29日,2020中國并聯機器人產業發展協商會暨中國并聯機器人產業聯盟籌備磋商會在西青開發區圓滿落下帷幕。本次活動由天津西青經濟技術開發區主辦,聚集了勃肯特機器人、華盛控科技、翼菲自動化
2020-11-02 10:44:412274 并聯機器人(DELTA)在上世紀90年代才真正引起廣泛注意,具有剛度高、速度快、柔性強、重量輕等優點,與串聯機器人一起構成工業機器人的重要部分。在食品、醫藥、電子等輕工業中應用最為廣泛,在物料的搬運
2020-11-04 09:12:363237 針對我國食品生產行業的實際需求,基于并聯機器人,機器視覺等先進技術,構建了面向食品生產包裝的高速機器人分揀系統,研究了輸送帶上運動食品的機器視覺定位算法,設計了運動食品分級與定位的機器視覺硬件系統
2020-11-16 18:05:5926 并聯機器人(DELTA)在上世紀90年代才真正引起廣泛注意,具有剛度高、速度快、柔性強、重量輕等優點,與串聯機器人一起構成工業機器人的重要部分。在食品、醫藥、電子等輕工業中應用最為廣泛,在物料的搬運
2020-11-27 11:19:542656 根據GGII數據統計,以中國內地市場為例,2014年并聯機器人市場銷量約620臺,2015年銷量約970臺,2016年銷量約1100臺。2017年,銷售額約為2790臺,2018年的銷量約為3650臺。2019年并聯機器人市場5800臺。
2020-12-04 10:45:332249 并聯機器人機構綜合設計是一個復雜而困難的問題。機構性能指標是這些問題的關鍵,主要包括:奇異位形,工作空間,各向同性與靈活度,力傳遞性能,剛度,速度與加速度等。
2020-12-21 16:23:322633 
并聯機器人,英文名為Parallel Mechanism,簡稱PM,可以定義為動平臺和定平臺通過至少兩個獨立的運動鏈相連接,機構具有兩個或兩個以上自由度,且以并聯方式驅動的一種閉環機構。
2020-12-26 08:21:301600 ? 作為場景向新專場的冠名商,勃肯特研究院院長董廣宇發表《技術驅動向新,并聯機器人進化之路》主題演講。他從技術創新、應用創新角度出發,分析如何打造出類拔萃的國產并聯機器人品牌。?? 縱觀整個并聯機器人
2020-12-28 16:40:052288 、大承載能力等場合,與串聯機器人相比具有明顯優勢,應用范圍更廣。 2019年,得益于在食品、醫藥、日化等領域有所突破,并聯機器人市場仍然保持了增長態勢。根據高工機器人產業研究所(GGII)數據顯示,2019年中國并聯機器人市場規模
2021-01-07 10:35:171731 并聯機器人控制。
2021-04-20 15:57:1913 近年來,國內并聯機器人的發展勢如破竹,市場細分化趨勢的愈發明顯,市場對并聯機器人的精度提出了更高的要求,企業要在并聯機器人領域打出一片天地,自身必須要有過硬的技術實力。 勃肯特就是擁有自主技術的并聯機器人
2021-05-17 09:11:052091 帶 AlphaStep 絕對式步進電機的 3 軸并聯機器人
2023-03-10 16:45:241031 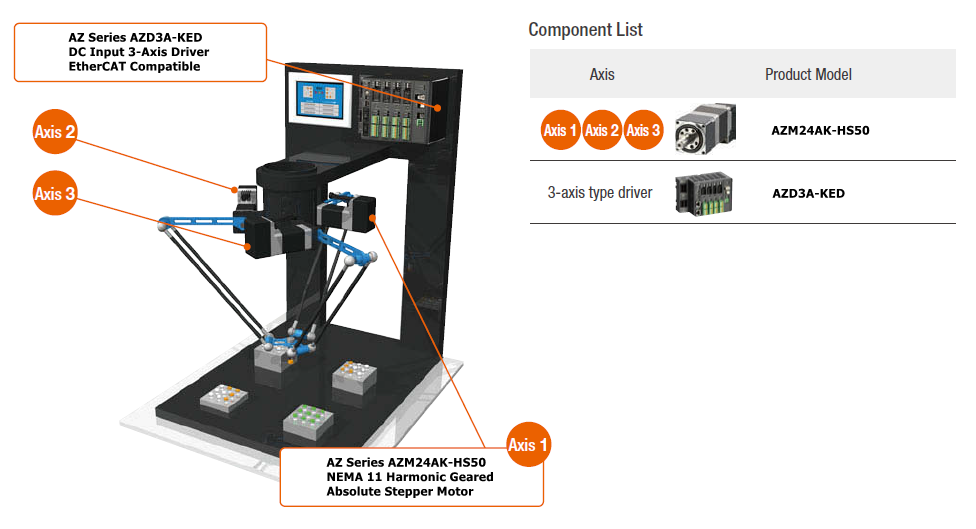
Pollard的并聯機構 1962年,Gough發明了一種基于并聯機構的六自由度輪胎檢測裝置; 并聯機器人 1965年,Stewart首次對Gough發明的這種機構進行了機構學意義上的研究,并將
2023-11-19 15:24:25337 
并聯機器人和串聯機器人的區別是什么? 并聯機器人和串聯機器人是兩種常見的機器人系統結構,它們在設計和應用上存在著一些明顯的區別。 1. 結構和連接方式: 首先,從結構和連接方式上來比較,并聯機器人和
2024-01-26 15:17:29924
 電子發燒友App
電子發燒友App









 工商網監
工商網監
評論