步進電機能精確控制進氣量從而達到溫度的準(zhǔn)確控制,新一代燃氣熱水器便是使用步進電機代替常規(guī)燃氣比例閥,進行燃氣輸出控制模塊。
2022-07-26 11:22:54 749
749 之前小白白寫過一篇步進電機驅(qū)動基礎(chǔ),講了最基本的步進電機驅(qū)動方法。
2022-10-19 15:50:571647 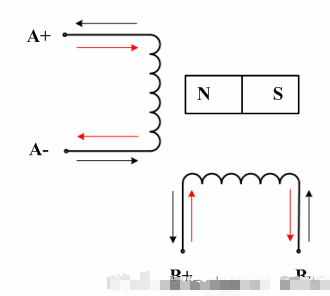
步進電機也叫步進器,它利用電磁學(xué)原理,將電能轉(zhuǎn)換為機械能,人們早在20世紀(jì)20年代就開始使用這種電機。
2023-08-01 15:37:52687 電機位置傳感器零位偏角(即旋變零位偏角或初始角)對電機輸出扭矩的精度至關(guān)重要。
2023-07-10 14:49:012910 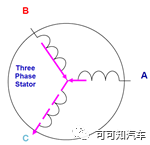
假設(shè)已經(jīng)實現(xiàn)了電機控制,后續(xù)的電機標(biāo)定大抵上分成兩類,一類是效率標(biāo)定,一類是外特性標(biāo)定。前者目標(biāo)是以提升在各工況下的系統(tǒng)效率。假設(shè)你了解交直軸變換,那么效率標(biāo)定的目標(biāo),就是通過調(diào)整交直軸電流,在不同的轉(zhuǎn)速條件下,以更高的效率來實現(xiàn)扭矩。這個過程就是不斷調(diào)整你的交直軸電流(對于異步機還得調(diào)整轉(zhuǎn)差率);
2023-08-04 10:26:182247 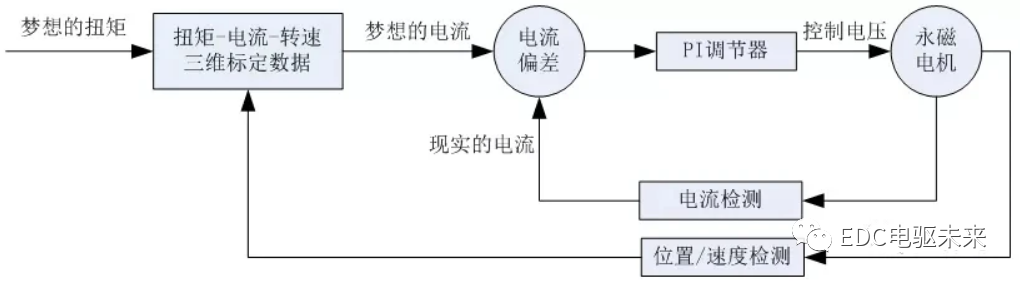
`100噸電子地磅標(biāo)定方法一、在稱重狀態(tài)下,把儀表背面的標(biāo)定開關(guān)打開,按功能鍵152、2268、1945二、儀表顯示:E 020 代表分度選擇(以 80噸/20Kg 為例)如修改分度值直接輸入數(shù)字鍵
2018-03-08 10:42:34
我現(xiàn)在搞試驗機,標(biāo)定速度。單片機驅(qū)動步進電機驅(qū)動器,控制油缸的速度,還有個油箱。現(xiàn)在有個問題,速度不成比例,標(biāo)定出來一個系數(shù)。然后控制油缸速度,設(shè)定0.5mm/s,1mm/s,2mm/s速度,結(jié)果油缸的速度不成比例,不是1:2:4的比例。不知道為什么。請高手指教,謝謝!
2019-09-10 14:33:59
步進電機基礎(chǔ)(8.2)-步進電機的問題解決方案-降低振動噪音的解決方法前言基本信息前言說明8.2 降低振動噪音的解決方法1. 與驅(qū)動電路有關(guān)的方法2. 與電機有關(guān)的方法降低振動和噪音效果好的方法如下
2021-07-08 09:40:18
顯示的正、反轉(zhuǎn)命令,轉(zhuǎn)速(16級)和轉(zhuǎn)動步數(shù)后執(zhí)行,轉(zhuǎn)動步數(shù)減為零時停止轉(zhuǎn)動。了解步進電機控制的基本原理,掌握步進電機轉(zhuǎn)動編程方法。三、預(yù)備知識步進電機驅(qū)動原理是通過它每相線圈中的電流的順序切換來使電機作步進式旋轉(zhuǎn),驅(qū)動電路由脈沖信號來控制,所以調(diào)節(jié)脈沖信號的頻率便可改變步進電機的轉(zhuǎn)速,微電
2022-01-10 08:26:47
步進電機控制通常采用什么方法實現(xiàn)?
2021-09-30 07:15:35
步進電機基礎(chǔ)(8.1)-步進電機的問題解決方案-增加動態(tài)轉(zhuǎn)矩的解決方法前言基本信息前言說明8.1 增加動態(tài)轉(zhuǎn)矩的解決方法1 . 步進電機在低速時增加轉(zhuǎn)矩的方法1) 選擇步距角小的步進電機2) 雙極型
2021-07-07 07:29:39
步進電機最簡單的驅(qū)動方法,了解四軸步進電機驅(qū)動器原理 四軸步進電機驅(qū)動器原理-簡介四軸步進電機驅(qū)動器,其實就是一種將電脈沖轉(zhuǎn)化為角位移的執(zhí)行機構(gòu)。首先步進驅(qū)動器會接收到一個脈沖信號,然后它按設(shè)定
2021-07-12 08:18:40
步進電機基礎(chǔ)(6.1)-步進電機的特性測量方法-靜態(tài)特性前言基本信息前言說明說明6.1 靜態(tài)特性1 . 靜態(tài)轉(zhuǎn)矩特性2. 靜 態(tài) 轉(zhuǎn) 矩 特 性 測 量1.轉(zhuǎn)矩表:2. 滑輪重量法:3. 應(yīng)力計
2021-07-07 07:28:34
步進電機基礎(chǔ)(7.1)-步進電機的選擇方法-電機種類的選擇(各種步進電機的優(yōu)缺點)前言基本信息前言說明說明7.1 電機種類的選擇1 . 由PM型 、VR型 、HB型來選定2 . 步進電機的相數(shù)選擇
2021-06-28 08:47:37
步進電機基礎(chǔ)(5.7)-步進電機的驅(qū)動與控制-加速控制、減速控制和附加制動的驅(qū)動方法前言基本信息前言說明5.7 加速控制、減速控制5.8 附加制動的驅(qū)動方法1. 反相序激磁制動2.最終步進延遲制動
2021-07-08 06:45:53
原文地址:步進電機選型的計算方法作者:三拓電氣 隨著工業(yè)自動化水平的不斷提高,步進及伺服技術(shù)在各個領(lǐng)域的應(yīng)用程度也在不斷提升,步進電機和伺服電機越來越多的被用來替代傳統(tǒng)的控制方式。而對于步進及伺服
2021-07-08 06:52:55
步進伺服電機回原點的常用方法是什么?
2021-09-29 07:18:40
但是實找零的方法有很多種,步進伺服電機自身可以完成,上位機配合也可以完成,下面就來介紹下回原點的常見方法有以下幾種。一、步進伺服電機在工作的時候,處于一直轉(zhuǎn)動的狀態(tài),但當(dāng)它碰到原點開關(guān)的時候,伺服
2021-06-28 08:52:50
提出一種采用高精度角位移傳感器取代機械式細分讀數(shù)機構(gòu),通過有機電致發(fā)光顯示器( OLED) 和耦合棱鏡實現(xiàn)內(nèi)置數(shù)顯的電子細分讀數(shù)方法,以有效地解決上述問題。1 測量原理1. 1 零位走動量的測量原理如圖
2018-05-03 09:22:37
請教各位ADI專家,我的LVDT傳感器接入AD698后,輸出零位有偏差,也就是傳感器的零位698調(diào)理輸出后不是0,而是1.5v,是不是相位補償有問題?數(shù)據(jù)轉(zhuǎn)換器專區(qū)
2018-09-25 17:40:45
我的LVDT傳感器接入AD698后,輸出零位有偏差,也就是傳感器的零位698調(diào)理輸出后不是0,而是1.5v,是不是相位補償有問題
2023-12-19 06:28:49
什么是步進電機?步進電機可分為哪幾種?電流細分的具體方法是什么?ENA的作用是什么?ENA有哪些應(yīng)用?
2021-06-30 06:02:21
步進電機和直流電機可以說是我們平時最常用的倆種電機,相比直流電機,步進電機可以實現(xiàn)的精準(zhǔn)控制也讓其可以做到很多直流電機無法做到的事情。這篇文章會詳細介紹四線倆相步進電機的驅(qū)動方法和一些調(diào)試方法。1.
2019-07-03 18:35:59
、標(biāo)定精度也不夠理想。基于模型的電機標(biāo)定方法,魯棒性強,測試點少,提高測試效率,將MTPA和弱磁放在一張表格中標(biāo)定,可同時實現(xiàn)基速以下以及高速弱磁區(qū)效率最優(yōu)控制,采用GUI,易操作,弱化電機背景知識。通...
2021-08-27 06:01:41
在應(yīng)用或設(shè)計傳感器時,常用零位法,微差法與閉環(huán)技術(shù),來削弱或消除系統(tǒng)誤差 1)零位法 零位法是指被測量與標(biāo)準(zhǔn)量相比較,當(dāng)達到平衡時,儀表指零,此時被測量就等于標(biāo)準(zhǔn)量。機械天平就是典型的例子
2018-11-15 16:49:08
永磁交流伺服電機的工作原理是什么?更換新編碼器后的常規(guī)零位校正方法是什么?永磁交流伺服電機的編碼器相位為何要與轉(zhuǎn)子磁極相位對齊?
2021-09-27 08:06:54
最近在做永磁同步電機轉(zhuǎn)子初始角定位,本人的做法是在IPARK環(huán)節(jié),給D軸電壓為0,Q軸電壓為正值,想通過此來將轉(zhuǎn)子在正式啟動前,先對齊到電角度零位上,但是無奈轉(zhuǎn)子不動沒反應(yīng),求前輩指點,感激不盡!
2017-04-26 19:57:30
單片機驅(qū)動步進電機的方法
2023-06-14 12:56:29
求大神分享伺服電機轉(zhuǎn)矩常數(shù)的標(biāo)定方法
2021-09-26 06:26:42
:感應(yīng)器連線是否牢固,是否經(jīng)過標(biāo)定(有線性校正機種必須先進行線性校正). 11、是否以超級用戶密碼進入(軟體保護機種),是否短路校正跳線(鉛封保護機種). 12、卸載后不歸零:零位跟蹤設(shè)置是否過小
2011-12-24 08:25:44
:感應(yīng)器連線是否牢固,是否經(jīng)過標(biāo)定(有線性校正機種必須先進行線性校正). 11、是否以超級用戶密碼進入(軟體保護機種),是否短路校正跳線(鉛封保護機種). 12、卸載后不歸零:零位跟蹤設(shè)置是否過小
2011-12-28 09:56:58
再將表頭重新固定即可。 五、調(diào)試 儀表在出廠前,已經(jīng)過標(biāo)定,無須用戶再次調(diào)整。若在使用過程中發(fā)生偏離,規(guī)定每年校檢,可按如下方法調(diào)試: 用磁鋼置于變送器傳感部分零位標(biāo)記處,調(diào)整殼體前蓋模塊上102
2020-07-17 17:52:24
目前我所了解的:1、當(dāng)使用增量式編碼器時,上電后無法獲取電機的基準(zhǔn)位置,所以需查找電機轉(zhuǎn)子初始位置;2、當(dāng)使用絕對式編碼器或hall傳感器時,可以獲取電機的絕對位置,如果通過機械安裝固定了零位則不
2018-08-06 09:06:27
捷聯(lián)式組合導(dǎo)航系統(tǒng)[1],影響系統(tǒng)精度的主要誤差源有:慣性器件的刻度系數(shù)誤差、零位誤差及軸安裝不對準(zhǔn)角等。為了確保系統(tǒng)的對準(zhǔn)和導(dǎo)航精度,必須利用精密轉(zhuǎn)臺對以上誤差源進行精確標(biāo)定,并通過系統(tǒng)軟件加以補償。一般情況下,在完成系統(tǒng)標(biāo)定后,若不對陀螺、加速度計全文下載
2010-04-24 09:31:29
步進電機工作原理與編程方法和控制源程序
本文介紹了步進電機的工作原理與編程方法,以及例出
2008-05-22 09:13:48 314
314 本文介紹了一種基于Windows下通過程序采用數(shù)字I/O卡控制步進電機的方法。
2009-04-02 16:07:1634 提出了一種基于PLC的四相步進電機控制的方法,介紹了控制系統(tǒng)的設(shè)計方案及其軟硬件的實現(xiàn)方法。實現(xiàn)對四相步進電機的轉(zhuǎn)速控制、正反轉(zhuǎn)控制、以及步數(shù)控制。提出設(shè)計總體方
2009-08-11 11:14:5089 步進電機是一種易于精確控制的電機,由于其良好的性能而受到廣泛的應(yīng)用。其控制方法也多種多樣。介紹了8051系列單片機對步進電機的控制方法,并且提出和對比了幾種步進電機
2009-11-07 15:11:00136 minet步進電機系統(tǒng)產(chǎn)品手冊二. 步進電機原理及術(shù)語5三. 步進電機驅(qū)動器及細分控制原理 .. 9四. 步進電機選型方法 .111.電機選型計算方法.. 112.本手冊常用2 相步
2010-01-09 10:29:0150 闡述了步進電機的驅(qū)動原理,介紹了恒流斬波、脈寬調(diào)制及細分驅(qū)動等步進電機驅(qū)動電路的結(jié)構(gòu)設(shè)計方法和設(shè)計中的相關(guān)技術(shù),并給出了實現(xiàn)方案。關(guān)鍵詞:步進電機; 恒流斬波; 脈
2010-01-09 13:41:4999 提出了一種基于PLC的四相步進電機控制的方法,介紹了控制系統(tǒng)的設(shè)計方案及其軟硬件的實現(xiàn)方法。實現(xiàn)對四相步進電機的轉(zhuǎn)速控制、正反轉(zhuǎn)控制、以及步數(shù)控制。提出設(shè)計總體方案
2010-07-21 09:31:1761 實驗 步進電機自動控制一、實驗?zāi)康?nbsp; 1.掌握用PLC控制步進電機的方法。
2008-09-30 13:16:041452 
8255A控制步進電機
<實驗?zāi)康?gt;了解步進電機的的基本控制原理,掌握控制步進電機的轉(zhuǎn)速、轉(zhuǎn)向的程序設(shè)計方法。<實驗內(nèi)
2009-06-28 00:02:405354 步進電機的應(yīng)用
(一)步進電機的選擇步進電機有步距角(涉及到相數(shù)
2010-01-09 15:11:264026 步進電機的保持轉(zhuǎn)矩,近似于傳統(tǒng)電機所稱的“功率”。當(dāng)然,有著本質(zhì)的區(qū)別。步進電機的物理結(jié)構(gòu),完全不同于交流、直流電機,步進電機的輸出功率是可變的。
2010-06-12 08:19:261036 步進電機原理,二相八線步進電動機接線方法參考圖及接線介紹。
2015-11-09 16:00:1410 步進電機在51單片機中的應(yīng)用,適合初學(xué)者學(xué)習(xí)。通過51單片機控制步進電機的方法
2016-02-23 16:51:427 幾種步進電機加減速方法的對比研究及其應(yīng)用。
2016-05-03 11:44:0211 基于最小偏差法的步進電機速度控制方法研究。
2016-05-03 13:52:593 基于Proteus的步進電機加減速控制輔助設(shè)計方法
2016-05-03 13:52:5917 步進電機短位移高響應(yīng)加減速控制方法研究。
2016-05-04 14:09:564 步進電機的精確控制方法研究,有需要 下來看看
2016-05-04 14:35:598 電子、電子信息專業(yè)電路單片機學(xué)習(xí)教程資料——步進電機的精確控制方法研究
2016-08-26 17:02:460 先進的步進電機控制方法
2017-01-23 20:48:1616 單片機控制步進電機的方法研究與應(yīng)用
2021-11-30 11:55:588 步進電機是一種感應(yīng)電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進電機供電,步進電機才能正常工作,驅(qū)動器就是為步進電機分時供電的,多相時序控制器。
2017-06-11 11:34:2931543 針對以往的文獻主要對個別加減速方法進行分析的問題,對比分析了幾種主要的步進電機加減速控制方法,并給出了具體的數(shù)學(xué)描述。在結(jié)合步進電機矩頻特性的基礎(chǔ)上,指出了各種方法的優(yōu)缺點。
2017-09-03 10:30:3910 多軸步進電機插補控制器及多軸步進電機運動控制卡控制方法
2018-04-11 10:24:4726 本文開始介紹了步進電機的概念與步進電機分類及優(yōu)點,其次介紹了步進電機相序的判斷方法,最后介紹了步進電機主要應(yīng)用領(lǐng)域。
2018-04-25 12:32:3113188 本文開始介紹了步進電機工作原理,其次介紹了三款步進電機電路圖,最后介紹了步進電機是否有編碼器以及步進電機加編碼器的方法和重要意義。
2018-04-25 12:48:4150524 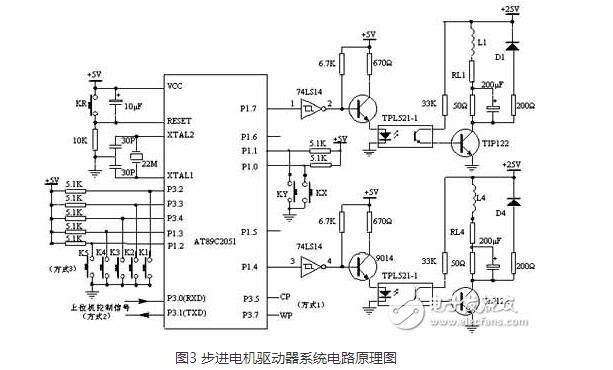
本文開始介紹了步進電機的基本原理,其次介紹了步進電機工作效率以及使步進電機的效率最大化的方法,最后介紹了步進電機選型的步驟與方法。
2018-04-25 14:06:014299 
步進電機產(chǎn)生共振是因為電機接收的脈沖頻率等于步進電機的固有頻率,該頻率與驅(qū)動器的細分有關(guān)系。
2018-09-14 08:43:009061 額定電壓(電流)驅(qū)動:參見前文《步進電機的靜態(tài)轉(zhuǎn)矩特性及測量方法》一文的下圖,從額定電壓降低電壓來驅(qū)動步進電機,發(fā)現(xiàn)位置定位精度變差。
2019-10-07 16:17:002130 
其中(1)的高次諧波為主要原因。步進電機使用方波電流驅(qū)動,必然含有大量的高次諧波,由此產(chǎn)生振動和噪音。因此驅(qū)動電流最好為正弦波。接近正弦波的驅(qū)動方法有步進電機的細分步進驅(qū)動。下圖為電機1/4細分、半步、整步驅(qū)動的振動比較,其振動為依次增加的。
2019-12-10 09:25:348494 本文主要闡述了步進電機驅(qū)動器調(diào)速方法及步進電機驅(qū)動器的作用。
2020-04-20 09:10:2810073 步進電機和伺服電機的辨別方法如下:力矩范圍:步進電機系統(tǒng)一般為中小力矩(一般在40Nm以下)范圍;伺服電機系統(tǒng)可實現(xiàn)全范圍。
2020-09-11 10:27:178386 從本文開始,將介紹兩相雙極步進電機和兩相單極步進電機的驅(qū)動電路,以及兩相雙極步進電機和兩相單極步進電機的驅(qū)動方法。首先介紹雙極連接和單極連接。
2021-06-12 11:55:002169 
步進電機主要是依相數(shù)來做分類的,通常我們常見的有四相、二相、三相等幾類。 ? ? ? ? ?二相步進電機與三相步進電機的區(qū)別: 電機的相數(shù) 是指電機內(nèi)部的線圈數(shù)不同,二相步進電機電機內(nèi)部是由2個線圈
2021-07-20 14:32:168933 步進電機主要是依相數(shù)來做分類的,通常我們常見的有四相、二相、三相等幾類。 ? ? ? ? ?二相步進電機與三相步進電機的區(qū)別: 電機的相數(shù) 是指電機內(nèi)部的線圈數(shù)不同,二相步進電機電機內(nèi)部是由2個線圈
2021-08-03 14:12:5015851 步進電機是什么?步進電機不轉(zhuǎn)怎么辦?小編教你解決步進電機不轉(zhuǎn)問題 日常生活中電機大家肯定都聽說過,但是步進電機或許就會有些陌生了,步進電機在一些領(lǐng)域起著相當(dāng)大的作用,但是步進電機不轉(zhuǎn)的情況時有出現(xiàn)
2022-04-14 10:51:3515672 在新開始的“步進電機”篇系列文章中,將介紹步進電機的結(jié)構(gòu)、步進電機的工作原理、步進電機的特性和步進電機的驅(qū)動方法。什么是步進電機?步進電機是一種可以與脈沖信號同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機,步進電機的也稱為“脈沖電機”。
2023-02-24 09:51:091897 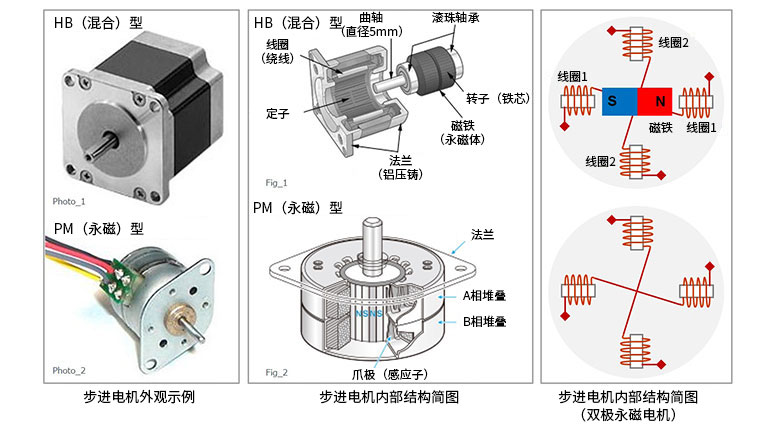
到目前為止,我們已經(jīng)介紹了步進電機的結(jié)構(gòu)和步進電機的驅(qū)動方法。本文在表格中簡要匯總了步進電機的特征及步進電機應(yīng)用。
2023-02-24 09:51:121006 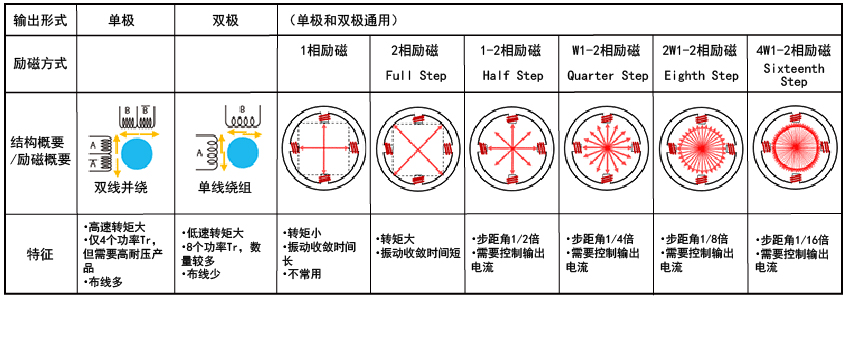
步進電機的步距角是指電機在每一步運動時所轉(zhuǎn)動的角度,一般用度數(shù)(°)來表示。常見的步進電機的步距角有1.8度、0.9度、0.45度、0.36度等。其中1.8度是最常見的步進電機步距角,也是最為普遍的一種。
2023-03-03 11:00:275753 最簡單的步進電機驅(qū)動方法是單相雙極驅(qū)動方式,也稱為雙相步進驅(qū)動方式。該方式只需要使用一個 H橋驅(qū)動器和一個脈沖發(fā)生器,即可實現(xiàn)步進電機的驅(qū)動控制。
2023-03-08 14:21:5612542 步進電機是一種可以與脈沖信號同步準(zhǔn)確地控制旋轉(zhuǎn)角度和轉(zhuǎn)速的電機,步進電機的也稱為“脈沖電機”。由于步進電機無需使用位置傳感器僅通過開環(huán)控制即可實現(xiàn)準(zhǔn)確的定位而被廣泛用??于需要定位的設(shè)備中。
2023-03-09 11:49:321227 
另外,步進電機的牽入轉(zhuǎn)矩特性和失步轉(zhuǎn)矩特性會因勵磁方法和驅(qū)動電路而異。因此,對步進電機的特性研究中,需要進行包括驅(qū)動方法和電路在內(nèi)的整體評估。
2023-03-09 11:52:28454 
從本文開始,將介紹兩相雙極步進電機和兩相單極步進電機的驅(qū)動電路,以及兩相雙極步進電機和兩相單極步進電機的驅(qū)動方法。首先介紹雙極連接和單極連接。
2023-03-10 09:14:05783 
應(yīng)用的電感測量方法原理、
步驟及優(yōu)缺點。直流暫態(tài)法原理簡單,操作容易,但必須知道準(zhǔn)確的電機相對零位,并用外部夾具將電機轉(zhuǎn)子固定在相對零
位,所以相對零位的精確度會直接影響該方法的準(zhǔn)確性。交流穩(wěn)態(tài)法的測量步驟相對繁瑣
2023-03-13 10:48:462 本章介紹步進電機的主要驅(qū)動方式和控制方法。步進電機性能除了電機本體外,還會根據(jù)驅(qū)動方式和控制方法不同而受到很大影響。選擇步進電機的時候,同時要著重考慮驅(qū)動方式和控制方法。
2023-03-20 10:52:305 為增進大家對步進電機的認識,本文將對步進電機的選型步驟以及方法予以介紹。 步進電機是電機諸多類型中的一種,同時也是其中步進電機應(yīng)用非常廣泛的一種。為增進大家對步進電機的認識,本文將對步進電機的選型
2023-03-22 09:38:333 步進電機是一種感應(yīng)電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為
步進電機供電,步進電機才能正常工作,驅(qū)動器就是為步進電機分時供電的。雖然步進電機已被
2023-03-23 10:50:161 一、步進電機的控制使用LD語言實現(xiàn) ? ? ? ?在該程序段中,涉及X、Y軸動作有,單次相對位置運動、點動、回零、當(dāng)前位置設(shè)為零位、停止等。 ? ? ? ? ? ? ?二、按照預(yù)設(shè)路徑進行
2023-03-23 11:42:000 為了評估步進電機的特性必須要有必要的測量方法。本章針對步進電機的基本特性①靜態(tài)特性:靜態(tài)轉(zhuǎn)矩特性,步進角度精度;②動態(tài)特性:速度-轉(zhuǎn)矩特性;③暫態(tài)特件;介紹各種測量方法。并且進一步
說明引起步進電機產(chǎn)生振動和噪音的原因,以及振動和噪音的測量方法。
2023-03-23 10:00:441 步進電機基礎(chǔ)(8.3)-步進電機的問題解決方案-改善暫態(tài)特性的解決方法 前言 基本信息 前言說明 8.3 改善暫態(tài)特性的解決方法 1. 利用阻尼器的改善 2 . 利用驅(qū)動電路的改善 (1) 半步進
2023-03-24 11:05:350 步進電機,就是根據(jù)控制信號運動,一個脈沖信號首先說到步進電機轉(zhuǎn)速,那就必須得說到步進電機轉(zhuǎn)動的一些原理。通過調(diào)節(jié)輸入驅(qū)動器的脈沖頻率以及驅(qū)動器的細分參數(shù)來達到調(diào)節(jié)步進電機轉(zhuǎn)速,實際是控制單位時間內(nèi)
2023-06-12 17:20:182396 步進電機能精確控制進氣量從而達到溫度的準(zhǔn)確控制,新一代燃氣熱水器便是使用步進電機代替常規(guī)燃氣比例閥,進行燃氣輸出控制模塊。步進電機只能檢測增量信息,而初始的零位檢測一般采用霍爾開關(guān)的方案。熱水器行業(yè)
2022-07-27 14:31:05379 
伺服電機編碼器一般由伺服電機廠根據(jù)設(shè)計需要確定零位角度,如果后期維修無法確定先前零位,只好自我找零位,這種找零方法比較麻煩。本文將詳細介紹編碼器中確定零位的方法以及怎樣找零點的過程。
2023-07-26 10:23:047704 步進系統(tǒng)=步進驅(qū)動器+步進電機。步進電機由步進驅(qū)動器來驅(qū)動,相當(dāng)于驅(qū)動電源,且它受外部的脈沖信號和方向信號控制(這里舉例是西門子PLC輸出脈沖),進而控制步進電機的旋轉(zhuǎn)角度和速度。
2023-10-30 11:30:52942 
在機器人零點校正時,軸被移到一個定義的機械位置,即所謂機械零位。如果機器人在這機械零位, 那么每個軸的絕對傳感器值被存儲。零點標(biāo)定目的是使機器人各軸的軸角度與連接在各軸電機上的絕對值編碼器的脈沖計數(shù)值對應(yīng)起來的操作。具體而言,是為了求取零度姿勢的脈沖計數(shù)值的操作。
2023-11-19 16:19:411138 
步進電機的控制方法以及所需的控制信號。 步進電機的控制方法主要分為開環(huán)控制和閉環(huán)控制兩種。 開環(huán)控制是指根據(jù)預(yù)定的電流和時間控制信號來驅(qū)動步進電機,根據(jù)電流和時間的確定性,可以較精確地控制電機的角度和速度。開
2023-12-20 11:21:24767 步進電機控制方法 步進電機是一種將電信號轉(zhuǎn)化為機械轉(zhuǎn)動的電動機,其輸出轉(zhuǎn)角是按照電脈沖控制信號的變化而變化的。步進電機的控制方法有幾種常見的方式,包括全步進控制、半步進控制和微步進控制。 全步進控制
2024-01-22 17:18:18318 步進電機正反轉(zhuǎn)的換線方法 步進電機是一種常見的電機類型,它具有正反轉(zhuǎn)的能力。換線是指改變步進電機的電源連接方式,以改變其運動方向。換線方法有很多種,下面將詳細介紹其中一種常見的換線方法。 步進電機
2024-01-23 14:45:51663 步進電機丟步的原因和解決方法 步進電機是一種常見的電動機類型,特點是可以實現(xiàn)精確的位置控制和旋轉(zhuǎn)運動。然而,在實際使用過程中,步進電機有時會出現(xiàn)丟步的現(xiàn)象,即無法按照預(yù)定步長準(zhǔn)確移動。這種情況可能會
2024-02-01 16:32:47706 步進電機能精確控制進氣量從而達到溫度的準(zhǔn)確控制,新一代燃氣熱水器便是使用步進電機代替常規(guī)燃氣比例閥,進行燃氣輸出控制模塊。 步進電機只能檢測增量信息,而初始的零位檢測一般采用霍爾開關(guān)的方案
2022-07-19 15:50:12
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論