`TC6012、TC6013、TC6014分別是一顆2軸、3軸、4軸運(yùn)動(dòng)控制IC。分別能夠?qū)?個(gè)軸、3個(gè)軸、4個(gè)軸的步進(jìn)驅(qū)動(dòng)器或者脈沖型的伺服電機(jī)驅(qū)動(dòng)器進(jìn)行位置、速度和插補(bǔ)進(jìn)行控制。所有的芯片功能
2018-08-28 11:00:36
本人對(duì)運(yùn)動(dòng)控制卡一無(wú)所知,想問(wèn)一下運(yùn)動(dòng)控制是不是也像數(shù)據(jù)采集卡一樣有多組通道呢,一塊運(yùn)動(dòng)控制卡能不能實(shí)現(xiàn)同時(shí)控制幾個(gè)電機(jī)做相同的運(yùn)動(dòng)呢?
2013-06-05 00:45:32
控制器 :
運(yùn)動(dòng)控制是自動(dòng)化的一個(gè)分支,它使用稱為伺服機(jī)構(gòu)的一些設(shè)備如液壓泵,線性執(zhí)行機(jī)或者是電機(jī)來(lái)
控制機(jī)器的
位置和/或速度。
運(yùn)動(dòng)控制在機(jī)器人和數(shù)控機(jī)床的領(lǐng)域內(nèi)的應(yīng)用要比在專用機(jī)器中的應(yīng)用更復(fù)雜,因?yàn)楹笳?/div>
2022-03-03 15:43:50
運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式的專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)再停
2019-06-03 17:24:58
及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。本文深刻探討了運(yùn)動(dòng)控制器是如何進(jìn)行設(shè)計(jì)的?
2019-07-31 08:15:26
運(yùn)動(dòng)控制器是運(yùn)動(dòng)控制系統(tǒng)的核心部件。目前,國(guó)內(nèi)的運(yùn)動(dòng)控制器大致可以分為3類:第1類是以單片機(jī)等微處理器作為控制核心的運(yùn)動(dòng)控制器。這類運(yùn)動(dòng)控制器速度較慢、精度不高、成本相對(duì)較低,只能在一些低速運(yùn)行和對(duì)軌跡要求不高的輪廓運(yùn)動(dòng)控制場(chǎng)合應(yīng)用。
2019-10-16 06:22:14
運(yùn)動(dòng)控制器就是控制電動(dòng)機(jī)的運(yùn)行方式的專用控制器:比如電動(dòng)機(jī)在由行程開關(guān)控制交流接觸器而實(shí)現(xiàn)電動(dòng)機(jī)拖動(dòng)物體向上運(yùn)行達(dá)到指定位置后又向下運(yùn)行,或者用時(shí)間繼電器控制電動(dòng)機(jī)正反轉(zhuǎn)或轉(zhuǎn)一會(huì)停一會(huì)再轉(zhuǎn)一會(huì)再停
2021-09-07 07:40:34
》、《機(jī)電一體化系統(tǒng)》、《運(yùn)動(dòng)控制》等課程的配套實(shí)驗(yàn)教學(xué)模型。ZN-YD運(yùn)動(dòng)控制實(shí)驗(yàn)裝置是一個(gè)將速度控制技術(shù)、位置控制技術(shù)、位置檢測(cè)技術(shù)等有機(jī)結(jié)合的教學(xué)實(shí)驗(yàn)系統(tǒng)。它由運(yùn)動(dòng)控制器、伺服電機(jī)及伺服驅(qū)動(dòng)器、滾珠絲桿等組成。二、技術(shù)性能1、輸入電壓:?jiǎn)蜗嗳€制 ~220V±10%50Hz2、工作環(huán)境:溫度范圍
2021-07-01 09:34:35
一、定義運(yùn)動(dòng)控制(Motion Control)通常是指在復(fù)雜條件下,將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。 按照
2021-09-07 06:37:22
1.運(yùn)動(dòng)控制系統(tǒng)組成1)人機(jī)接口2)運(yùn)動(dòng)控制器3)驅(qū)動(dòng)器4)執(zhí)行器5)傳動(dòng)機(jī)構(gòu)6)反饋2.運(yùn)動(dòng)曲線1)梯形速度曲線梯形曲線比較簡(jiǎn)單,但是梯形尖角會(huì)導(dǎo)致加速度不連續(xù),對(duì)系統(tǒng)產(chǎn)生極大的沖擊。2)S型速度
2021-09-01 07:52:50
今天,正運(yùn)動(dòng)技術(shù)給大家分享一下EtherCAT運(yùn)動(dòng)控制卡之ECI2820如何使用C#實(shí)現(xiàn)運(yùn)動(dòng)暫停、恢復(fù)與系統(tǒng)安全的設(shè)置。 一 運(yùn)動(dòng)控制卡硬件介紹 ECI2828系列運(yùn)動(dòng)控制卡支持多達(dá) 16
2021-09-01 06:24:52
關(guān)于運(yùn)動(dòng)控制,可以選用NI的硬件和硬件驅(qū)動(dòng),開發(fā)時(shí)間比較短,但是成本較高。另外運(yùn)動(dòng)控制還可以使用PLC和運(yùn)動(dòng)控制卡,我現(xiàn)在使用的是PCI的運(yùn)動(dòng)控制卡,市場(chǎng)上很多,大多數(shù)會(huì)提供驅(qū)動(dòng),支持VC、VB等等
2015-02-10 11:30:19
什么是運(yùn)動(dòng)控制卡?運(yùn)動(dòng)控制卡與驅(qū)動(dòng)器有什么不同?PLC控制好還是運(yùn)動(dòng)控制卡控制好?
2021-10-09 07:56:29
STM32小車篇之舵機(jī)控制角度舵機(jī)組成舵機(jī)的主要組成部分為伺服電機(jī),所謂伺服就是服從信號(hào)的要求而動(dòng)作。在信號(hào)來(lái)之前,轉(zhuǎn)子停止不動(dòng);信號(hào)來(lái)到之后,轉(zhuǎn)子立即運(yùn)動(dòng)。因此我們就可以給舵機(jī)輸入不同的信號(hào),來(lái)
2021-06-30 08:02:51
CMC5401運(yùn)動(dòng)控制開發(fā)板,串口運(yùn)動(dòng)控制器,運(yùn)動(dòng)控制核心板采購(gòu)TC6014運(yùn)動(dòng)控制專用芯片。由核心板和外圍板組合而成。板子尺寸:8.5cm*7.5cm,可供使用者進(jìn)行硬件的二次開發(fā),適用于運(yùn)動(dòng)控制
2017-08-09 14:26:10
想通過(guò)表格設(shè)置電機(jī)的每次運(yùn)動(dòng)位置,且表格必須在上一行有坐標(biāo)參數(shù)的情況下,才能輸入下一行的坐標(biāo)參數(shù),并且自動(dòng)更新行首的第X點(diǎn),如何實(shí)現(xiàn)?
2018-07-06 17:19:37
一、運(yùn)功控制核心
單軸運(yùn)動(dòng)、多軸直線插補(bǔ)運(yùn)動(dòng)、圓弧插補(bǔ)、連續(xù)軌跡插補(bǔ)
電子齒輪、電子凸輪
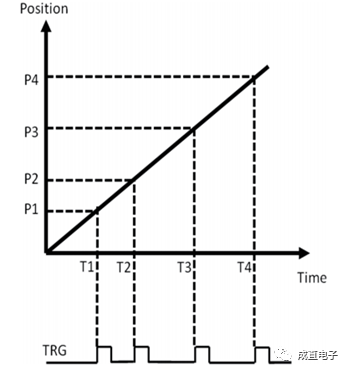
多維硬件位置比較觸發(fā)
高速位置鎖存
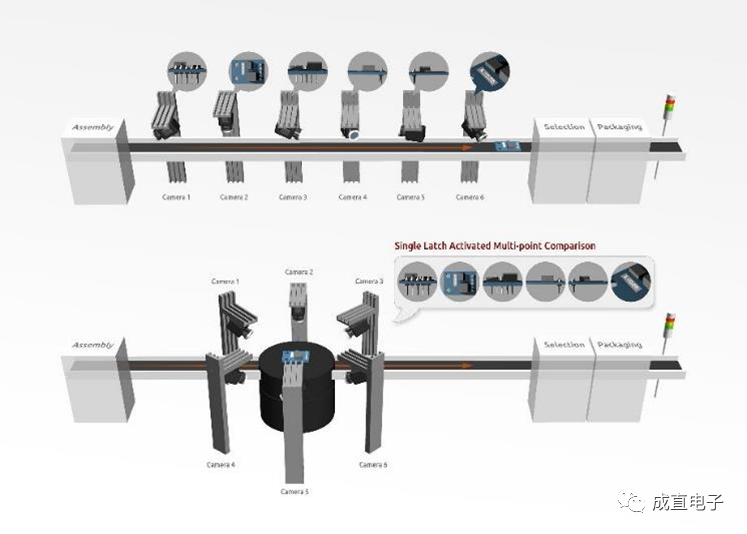
機(jī)器視覺(jué)飛拍
高速PWM輸出
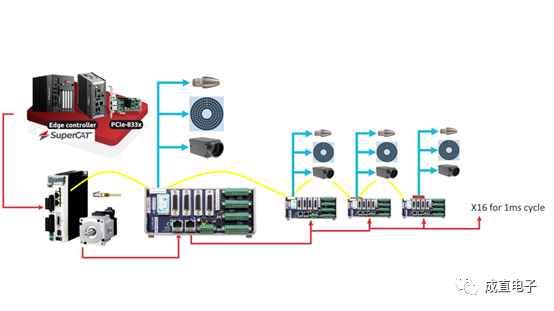
二、一站式解決方案
32軸
2023-06-01 09:39:23
充分利用PC的高效數(shù)據(jù)處理和開放性特性,以及控制卡高速PWM、多維位置比較輸出PSO等功能,實(shí)現(xiàn)出色的多軸同步控制和高速點(diǎn)位以及復(fù)雜的軌跡運(yùn)動(dòng)控制等功能,確保了控制卡與上位機(jī)的無(wú)縫實(shí)時(shí)數(shù)據(jù)交互,極大
2024-01-24 09:48:21
運(yùn)動(dòng)控制器是用來(lái)實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)準(zhǔn)確的位置控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。運(yùn)動(dòng)控制器按結(jié)構(gòu)分類可分為PLC可編程邏輯控制器、單片機(jī)控制器、獨(dú)立式運(yùn)動(dòng)控制器、基于PC機(jī)的運(yùn)動(dòng)控制卡、網(wǎng)絡(luò)控制
2021-08-02 10:04:58
什么是運(yùn)動(dòng)控制系統(tǒng)?運(yùn)動(dòng)控制系統(tǒng)的任務(wù)是什么?
2021-10-29 07:40:48
關(guān)于伺服位置控制模式往復(fù)運(yùn)動(dòng)中,在換向時(shí)響聲大,機(jī)械震動(dòng)如何消除?
設(shè)備要求換向時(shí)越快越好,不能以降低機(jī)械剛性為代價(jià)。
有經(jīng)驗(yàn)的兄弟指點(diǎn)一二啊!
2023-12-11 06:49:10
和輸出之比所解釋的技術(shù)術(shù)語(yǔ),現(xiàn)在直接使用增益來(lái)表示。1.相對(duì)運(yùn)動(dòng):必需對(duì)位置值加以計(jì)算,點(diǎn)動(dòng)運(yùn)行、往返運(yùn)動(dòng)一定位置量的控制系統(tǒng)。2.絕對(duì)運(yùn)動(dòng):直接下達(dá)位置值,可用于XY軸、table等,一般的機(jī)械均可使用。于指令程序中較為簡(jiǎn)便。:干貨 | 伺服電機(jī)速度、位置、轉(zhuǎn)矩控制的比較
2018-10-11 10:29:54
1MHz。 32位PCI總線,即插即用脈沖輸出方式:脈沖/方向,脈沖/脈沖最大脈沖輸出頻率為2MHz任意2-6軸硬件直線插補(bǔ)可用S型和梯形進(jìn)行加/減速運(yùn)動(dòng)中可實(shí)時(shí)改變速度及目標(biāo)位置運(yùn)動(dòng)控制卡具有大容量緩存
2012-12-24 15:25:13
:set of set-point關(guān)節(jié)伺服控制,輪廓位置模式是最常用的模式,用于從一個(gè)點(diǎn)運(yùn)動(dòng)到另一個(gè)點(diǎn)(point to point),其也是控制模式中比較復(fù)雜的模式。該模式包含了兩個(gè)部分,軌跡規(guī)劃器
2021-06-28 07:07:53
一些具體的功能卻不是特別的了解,也不理解運(yùn)動(dòng)控制器是怎樣工作的。那么深圳運(yùn)動(dòng)控制器是怎么工作的?相信不少人是有疑問(wèn)的,今天四元數(shù)數(shù)控就跟大家解答一下!實(shí)際上運(yùn)動(dòng)控制器能夠通過(guò)自己本身所下達(dá)的一些比較
2021-12-29 11:26:19
專用運(yùn)動(dòng)控制芯片全球生產(chǎn)廠家極少,目前比較通用做的較大的是日本的NPM和nova,這兩個(gè)公司的專用芯片學(xué)起來(lái)比較復(fù)雜。國(guó)產(chǎn)的目前就找到一家國(guó)產(chǎn)的運(yùn)動(dòng)控制芯片,這里把找到的資料分析給大家。
2019-11-11 17:39:37
通用型運(yùn)動(dòng)控制器。其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。本文對(duì)該運(yùn)動(dòng)
2009-09-19 09:43:00
RT,我想做labview的電機(jī)控制,兩者中間通過(guò)運(yùn)動(dòng)控制卡。然后我的電機(jī)的每個(gè)時(shí)刻的轉(zhuǎn)角位置已經(jīng)導(dǎo)入txt格式的文本中,,那么這個(gè)程序該怎么寫啊?求大神回復(fù)
2015-04-26 23:16:35
我想用pmac控制電機(jī)運(yùn)動(dòng),pmac與labview通信,并通過(guò)labview實(shí)時(shí)顯示電機(jī)運(yùn)動(dòng)狀況,請(qǐng)問(wèn)labview中如何采集信號(hào)?采集到的信號(hào)我想以波形圖的形式輸出并進(jìn)行分析
2017-05-09 16:05:49
的邏輯處理和控制算法,能實(shí)現(xiàn)多軸高速高精度的伺服控制。利用DSP與FPGA設(shè)計(jì)運(yùn)動(dòng)控制器,其中DSP用于運(yùn)動(dòng)軌跡規(guī)劃、速度控制及位置控制等功能;FPGA完成運(yùn)動(dòng)控制器的精插補(bǔ)功能,用于精確計(jì)算步進(jìn)電機(jī)或伺服驅(qū)動(dòng)元件的控制脈沖,同時(shí)接收并處理脈沖型位置反饋信號(hào)。那么,我們具體該怎么做呢?
2019-08-06 06:27:00
如何才能讓電機(jī)保持恒速運(yùn)動(dòng)呢?什么是位置控制?位置控制真的是最簡(jiǎn)單的控制方式嗎?
2021-08-20 06:30:18
今后基于計(jì)算機(jī)標(biāo)準(zhǔn)總線的運(yùn)動(dòng)控制器仍然是市場(chǎng)的主流,但是,基于網(wǎng)絡(luò)的嵌入式運(yùn)動(dòng)控制器會(huì)有較大的發(fā)展。基于計(jì)算機(jī)標(biāo)準(zhǔn)總線的通用運(yùn)動(dòng)控制器主要是板卡結(jié)構(gòu),采用的總線大都為ISA、PCI。由于它們的應(yīng)用依附于通用PC 計(jì)算機(jī)平臺(tái),從工業(yè)控制的角度分析,這種運(yùn)動(dòng)控制器的優(yōu)缺點(diǎn)如下:
2019-07-23 06:46:17
在現(xiàn)代的工業(yè)控制、車輛運(yùn)動(dòng)和醫(yī)療設(shè)備等系統(tǒng)中,懸掛運(yùn)動(dòng)系統(tǒng)的應(yīng)用越來(lái)越多,在這些系統(tǒng)中懸掛運(yùn)動(dòng)部件通常是具體的執(zhí)行機(jī)構(gòu),因而懸掛部件的運(yùn)動(dòng)精確性是整個(gè)系統(tǒng)工作效能的決定因素,而在實(shí)際中實(shí)現(xiàn)懸掛運(yùn)動(dòng)
2019-08-12 08:21:38
實(shí)時(shí)位置及速度測(cè)量,編碼器的實(shí)驗(yàn)講解等。 主要有以下5個(gè)實(shí)驗(yàn)課程: (1)運(yùn)動(dòng)控制卡與絲杠滑臺(tái)接線方法 (2)定長(zhǎng)運(yùn)動(dòng)實(shí)驗(yàn)講解 (3)編碼器實(shí)驗(yàn)講解 (4)回原點(diǎn)運(yùn)動(dòng)實(shí)驗(yàn)講解 (5)實(shí)時(shí)位置及速度測(cè)量實(shí)驗(yàn)
2021-11-26 10:38:50
求教各位大神,現(xiàn)有一塊7344的運(yùn)動(dòng)控制卡,UMI-7774的運(yùn)動(dòng)控制接線盒,想要控制店家,如何在MAX里面進(jìn)行配置?
2016-01-21 22:12:33
原理u是四個(gè)輪子的角速度,r是輪子半徑;開環(huán)運(yùn)動(dòng)控制各輪子的轉(zhuǎn)速->車身的運(yùn)動(dòng)->按理想位姿到達(dá)目標(biāo)位置前半段上面已經(jīng)解決,現(xiàn)在解決后半段。關(guān)于控制律:通過(guò)v...
2021-08-30 08:06:08
電機(jī)控制之旋變及位置反饋解決方案篇其它話題的熱門問(wèn)答請(qǐng)前往總貼查看。http://www.deyisupport.com/question_answer/microcontrollers/c2000
2020-05-20 09:33:31
直流電機(jī)運(yùn)動(dòng)控制的過(guò)程中怎么實(shí)現(xiàn)高精度的位置控制
2023-10-11 06:23:00
`項(xiàng)目背景隨著電機(jī)行業(yè)的飛速發(fā)展,電機(jī)測(cè)試項(xiàng)目越來(lái)越多,電機(jī)行業(yè)當(dāng)前需要對(duì)電機(jī)與驅(qū)動(dòng)器進(jìn)行完整的測(cè)試與性能分析,可是傳統(tǒng)的測(cè)功機(jī)是無(wú)法做到的,西安一所高校找到納米軟件,希望通過(guò)控制精密運(yùn)動(dòng)控制器實(shí)現(xiàn)
2021-01-12 14:02:12
請(qǐng)問(wèn)一下運(yùn)動(dòng)控制卡中伺服電機(jī)的規(guī)劃位置與編碼器位置的區(qū)別是什么?
2021-10-12 11:24:30
μs至100 μs范圍內(nèi))。實(shí)際上,網(wǎng)絡(luò)同步周期和PWM周期之間將存在一個(gè)未經(jīng)定義且可變的相位關(guān)系。將其與實(shí)時(shí)網(wǎng)絡(luò)上低于1 μs的時(shí)間不確定性相比較,很顯然,電機(jī)控制器的I/O在網(wǎng)絡(luò)同步運(yùn)動(dòng)控制中起到更
2019-03-30 09:38:14
儀、邏輯分析儀、邏輯分析系統(tǒng)、智慧邏輯分析儀、單片邏輯分析儀、攜帶型邏輯分析儀、虛擬邏輯儀等屬于這類;其特點(diǎn)是具有足夠的輸入通道、超前觀測(cè)能力、多種觸發(fā)方式、存儲(chǔ)能力、多功能顯示方式和比較能力,結(jié)構(gòu)由捕獲
2017-09-28 09:30:56
運(yùn)動(dòng)控制器有專用的持續(xù)運(yùn)動(dòng)控制指令,運(yùn)動(dòng)控制器持續(xù)發(fā)脈沖,控制軸以指定的速度和方向持續(xù)運(yùn)動(dòng),持續(xù)運(yùn)動(dòng)常用的指令為VMOVE,以運(yùn)動(dòng)速度SPPED持續(xù)運(yùn)動(dòng),此時(shí)停止軸運(yùn)動(dòng)使用CANCEL或
2023-02-17 14:03:36
轉(zhuǎn)角-線位移式全閉環(huán)位置伺服系統(tǒng)及誤差分析::在一些精度要求比較高的應(yīng)用場(chǎng)合,半閉環(huán)的位置伺服系統(tǒng)不能滿足要求。文中提出采用轉(zhuǎn)角-線位移式全閉環(huán)位置控制方法,光柵
2009-07-05 21:34:21 21
21
用比較器構(gòu)成的斯密特觸發(fā)器
2009-04-13 10:22:59 1856
1856 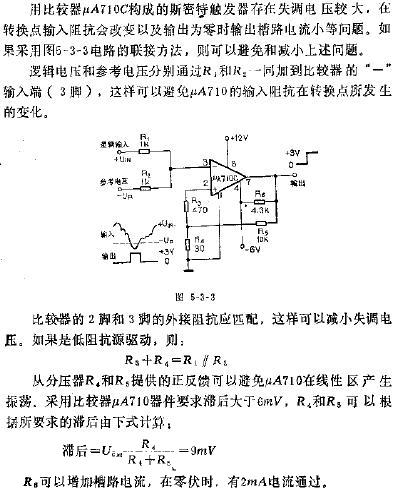
深入分析基于矢量控制控制的PMSM(永磁同步電動(dòng)機(jī)的簡(jiǎn)稱)位置伺服系統(tǒng)電流滯環(huán)控制方案。為了實(shí)現(xiàn)高性能的位置伺服電流環(huán)控制,對(duì)比了常規(guī)電流滯環(huán)控制和三角波載波比較方式的
2011-08-25 16:27:37103 本內(nèi)容詳細(xì)介紹了邏輯分析儀可視觸發(fā)和流程觸發(fā)的高級(jí)應(yīng)用
2011-09-22 14:30:5014 布置在海面上的攝像平臺(tái)的運(yùn)動(dòng)難免會(huì)對(duì)目標(biāo)在攝像系統(tǒng)中的成像位置產(chǎn)生影響。分析這些運(yùn)動(dòng)對(duì)目標(biāo)成像位置的影響,為是否需要采用穩(wěn)定裝置和采用什么樣的穩(wěn)定裝置提供了理論依據(jù),因此具有較大的應(yīng)用價(jià)值。
2013-01-22 14:35:290 不同加減速控制算法的能耗分析與比較,下來(lái)看看
2016-05-04 14:37:017 MMC控制策略比較分析研究_李威
2017-01-07 18:12:512 運(yùn)動(dòng)控制(MC)是自動(dòng)化的一個(gè)分支,它使用通稱為伺服機(jī)構(gòu)的一些設(shè)備如液壓泵,線性執(zhí)行機(jī)或者是電機(jī)來(lái)控制機(jī)器的位置或速度。運(yùn)動(dòng)控制(Motion Control)通常是指在復(fù)雜條件下將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。
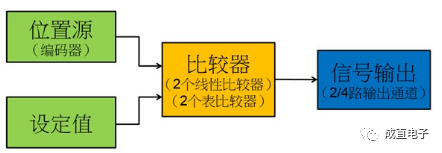
2017-09-25 15:36:0112 運(yùn)動(dòng)控制器內(nèi)有兩個(gè)二維位置比較單元,可用于將編碼器位置或內(nèi)部脈沖計(jì)數(shù)器位置與設(shè)定位置比較,當(dāng)編砭馬器位置或內(nèi)部脈沖計(jì)數(shù)器位置到達(dá)設(shè)定位置時(shí),在高速I0 (HSIO) 口輸出脈沖或反轉(zhuǎn)電平。端子板共有
2017-10-11 17:03:483 針對(duì)用于激光焊接的關(guān)節(jié)型工業(yè)機(jī)器人運(yùn)動(dòng)誤差控制問(wèn)題,根據(jù)關(guān)節(jié)型工業(yè)機(jī)器人伺服控制和運(yùn)動(dòng)學(xué)原理,分析了機(jī)器人運(yùn)動(dòng)誤差的積累過(guò)程,并對(duì)運(yùn)動(dòng)誤差和伺服系統(tǒng)誤差分別進(jìn)行了測(cè)量和比較。結(jié)果表明,伺服系統(tǒng)誤差是運(yùn)動(dòng)誤差的重要組成部分。該結(jié)論對(duì)機(jī)器人激光焊接的路徑控制具有一定參考意義。
2017-10-12 18:19:066 本文主要介紹了電壓比較器工作原理、電壓比較器功能作用與施密特觸發(fā)器作用。最后介紹了施密特觸發(fā)器能否代替電壓比較器以及它們之間的區(qū)別。
2018-01-16 11:59:0719675 
針對(duì)實(shí)際運(yùn)動(dòng)控制對(duì)機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析及性能分析的依賴性問(wèn)題,將并聯(lián)機(jī)構(gòu)運(yùn)動(dòng)分析方法應(yīng)用到了新型并聯(lián)機(jī)構(gòu)2URR-2RRU中。首先運(yùn)用了螺旋理論對(duì)機(jī)構(gòu)白由度進(jìn)行分析,采用矢量法對(duì)機(jī)構(gòu)進(jìn)行了位置分析,通過(guò)位置
2018-03-08 10:15:070 研控MCC系列運(yùn)動(dòng)控制卡使用方便,功能可靠,一般來(lái)說(shuō)是不會(huì)在使用過(guò)程中產(chǎn)生位置偏差的。但是在長(zhǎng)期客戶服務(wù)的過(guò)程中我們也遇到了一些因使用不當(dāng)造成的位置偏差,如果沒(méi)有豐富的經(jīng)驗(yàn),往往會(huì)判斷為運(yùn)動(dòng)控制卡的問(wèn)題
2018-04-11 17:05:014781 運(yùn)動(dòng)控制器是用來(lái)實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。
2019-01-06 09:35:533097 支持速度前瞻、電子凸輪、電子齒輪、螺距補(bǔ)償、同步跟蹤、運(yùn)動(dòng)疊加、虛擬軸、脈沖閉環(huán)、硬件位置鎖存、位置比較輸出、連續(xù)插補(bǔ)、運(yùn)動(dòng)暫停等。
2019-07-25 16:50:193231 運(yùn)動(dòng)控制器內(nèi)有兩個(gè)二維位置比較單元,可用于將編碼器位置或內(nèi)部脈沖計(jì)數(shù)器位置與設(shè)定位置比較,當(dāng)編碼器位置或內(nèi)部脈沖計(jì)數(shù)器位置到達(dá)設(shè)定位置時(shí),在高速 IO(HSIO)口輸出脈沖或反轉(zhuǎn)電平。端子板共有
2019-08-19 08:00:002 運(yùn)動(dòng)控制(Motion Control)通常是指在復(fù)雜條件下,將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。
2019-09-19 11:00:279181 研究了在PLC或運(yùn)動(dòng)控制器在微多軸同步運(yùn)動(dòng)時(shí),如何通過(guò)一條5次方曲線,將從軸的位置運(yùn)動(dòng)更光滑平順。
2019-12-11 13:42:0426 具體的功能卻不是特別的了解,也不理解運(yùn)動(dòng)控制器是怎樣工作的。下面四元數(shù)數(shù)控將對(duì)運(yùn)動(dòng)控制器進(jìn)行分析: 運(yùn)動(dòng)控制器是怎樣工作的? 實(shí)際上,運(yùn)動(dòng)控制器能夠通過(guò)自己本身所下達(dá)的一些比較正規(guī)的指令,來(lái)進(jìn)行相應(yīng)的設(shè)置,
2020-11-09 16:57:073430 傳感器是數(shù)據(jù)收集,系統(tǒng)監(jiān)測(cè)和控制反饋的重要組成部分。在運(yùn)動(dòng)控制應(yīng)用中,傳感器采用旋轉(zhuǎn)或直線編碼器進(jìn)行位置反饋,傳感器(如用于速度傳感的轉(zhuǎn)速計(jì)),甚至接近開關(guān)來(lái)啟動(dòng)或停止某些機(jī)器動(dòng)作。
2020-12-26 00:23:53704 根據(jù)上述的速度曲線圖中的比較,說(shuō)明位置控制模式下的速度控制比速度模式下的速度控制要穩(wěn)定。經(jīng)長(zhǎng)時(shí)間的生產(chǎn)運(yùn)行,位置模式控制的速度一直都很穩(wěn)定,滿足的用戶的要求。
2021-02-10 17:19:005269 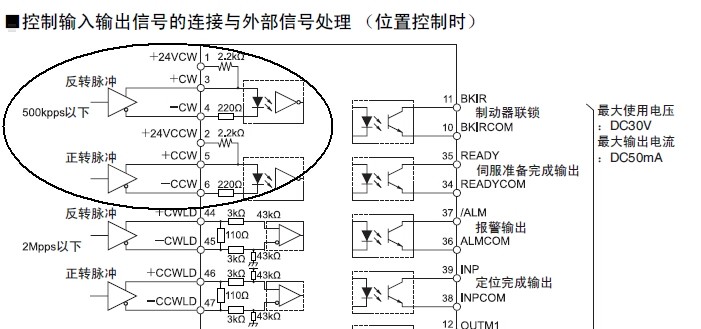
本文通過(guò)ZMC430N運(yùn)動(dòng)控制器在轉(zhuǎn)盤式視覺(jué)篩選設(shè)備中的方案應(yīng)用,來(lái)深入了解正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器配合機(jī)器視覺(jué)進(jìn)行視覺(jué)飛拍、PSO高速硬件位置比較輸出等功能的應(yīng)用優(yōu)勢(shì)。
2022-09-29 14:13:3518571 
今天,正運(yùn)動(dòng)小助手給大家分享一下運(yùn)動(dòng)控制器位置鎖存功能的應(yīng)用,以ZMC408CE運(yùn)動(dòng)控制器為例,介紹多種鎖存模式的用法,用戶可根據(jù)自身需求靈活選擇。
2022-11-07 10:57:16887 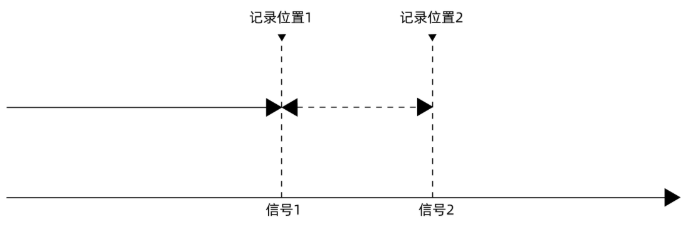
電子發(fā)燒友網(wǎng)站提供《自動(dòng)運(yùn)動(dòng)觸發(fā)路燈.zip》資料免費(fèi)下載
2022-11-11 10:14:270 鎖存功能的作用就是當(dāng)外部io信號(hào)觸發(fā)時(shí),立即響應(yīng),鎖定當(dāng)前的電機(jī)/編碼器的位置,通常用來(lái)鎖定流水線上碰到光纖傳感器時(shí)的產(chǎn)品位置、鎖定包裝材料上色標(biāo)的位置等。
2022-11-14 11:18:14661 本節(jié)主要講解SuperImposed位置控制功能塊: MC_MoveSuperImposed MC_HaltSuperImposed MC_MoveSuperImposed可在基礎(chǔ)運(yùn)動(dòng)控制功能塊
2023-03-08 14:29:00580 C#對(duì)雷賽運(yùn)動(dòng)控制卡的應(yīng)用案例1:定長(zhǎng)運(yùn)動(dòng)2:連續(xù)運(yùn)動(dòng)3:插補(bǔ)運(yùn)動(dòng)4:PVT運(yùn)動(dòng)5:手輪運(yùn)動(dòng)6:回原點(diǎn)運(yùn)動(dòng)7:IO8:AD-DA9:高速位置比較+鎖存
2023-03-31 15:13:020 于是在單限值比較器中加入了正反饋,反相輸入端接輸入電壓,做成滯回比較器,也叫施密特觸發(fā)器(Schmitt trigger)。
2023-04-03 09:33:2110526 運(yùn)動(dòng)控制系統(tǒng) 其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。 運(yùn)動(dòng)的要素 抽象來(lái)講,運(yùn)動(dòng)的要素
2023-04-21 18:02:141214 電子發(fā)燒友網(wǎng)站提供《帶和不帶微控制器的運(yùn)動(dòng)觸發(fā)電路.zip》資料免費(fèi)下載
2023-06-12 10:45:460 運(yùn)動(dòng)控制器是一種特殊的控制器,用于控制電機(jī)的運(yùn)行模式:例如,電機(jī)通過(guò)沖擊開關(guān)控制交流接觸器,將電機(jī)拉到指定位置,然后下降或使用時(shí)間繼電器控制電機(jī)的前后旋轉(zhuǎn),或先停一會(huì)兒,再停一會(huì)兒。運(yùn)動(dòng)控制在機(jī)器人和數(shù)控機(jī)床領(lǐng)域的應(yīng)用比在專用機(jī)床中更復(fù)雜,因?yàn)楹笳叩?b class="flag-6" style="color: red">運(yùn)動(dòng)形式更簡(jiǎn)單,通常被稱為通用運(yùn)動(dòng)控制。
2023-06-12 17:17:231391 電子發(fā)燒友網(wǎng)站提供《MKR FOX 1200運(yùn)動(dòng)觸發(fā)器開源分享.zip》資料免費(fèi)下載
2023-06-15 15:04:540 正運(yùn)動(dòng)技術(shù)的PCI Express?總線運(yùn)動(dòng)控制卡XPCIE1028,具備位置鎖存、多維高速硬件位置比較輸出PSO、同步跟隨、精準(zhǔn)觸發(fā)的運(yùn)動(dòng)控制和I/O控制功能。配合正運(yùn)動(dòng)技術(shù)MotionRT7實(shí)時(shí)
2023-06-15 15:21:410 正運(yùn)動(dòng)技術(shù)的PCI Express總線運(yùn)動(dòng)控制卡XPCIE1028,具備位置鎖存、多維高速硬件位置比較輸出PSO、同步跟隨、精準(zhǔn)觸發(fā)的運(yùn)動(dòng)控制和I/O控制功能。
2023-06-19 12:39:34289 
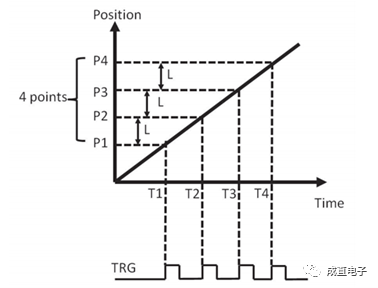
運(yùn)動(dòng)控制卡應(yīng)用開發(fā)教程之硬件比較輸出
2021-10-18 18:09:091093 
運(yùn)動(dòng)控制器的工作原理是將預(yù)定的控制方案、規(guī)劃指令轉(zhuǎn)變成期望的機(jī)械運(yùn)動(dòng),實(shí)現(xiàn)機(jī)械運(yùn)動(dòng)精確的位置(點(diǎn)位、運(yùn)動(dòng)軌跡、插補(bǔ)等)控制、速度控制、加速度控制、轉(zhuǎn)矩或力的控制。
2023-06-25 10:44:542162 
“現(xiàn)在 PLC 的運(yùn)動(dòng)控制功能越來(lái)越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動(dòng)控制器和具備運(yùn)動(dòng)控制功能的 PLC 的差別在哪里,運(yùn)動(dòng)控制器以后的優(yōu)勢(shì)又在哪里?”
2023-08-06 09:30:011205 
1、所謂位置環(huán)的“環(huán)”,不是我們說(shuō)的PID閉環(huán),位置不能像速度大小、電流大小那樣通過(guò)調(diào)節(jié)器調(diào)節(jié);
2、電機(jī)轉(zhuǎn)子、運(yùn)動(dòng)體的位置可以用編碼器也可以直接用位置檢測(cè)的方法,所以伺服都有直接位置檢測(cè)信號(hào)的輸入接口!
3、所謂運(yùn)動(dòng)控制的方式,主要是看運(yùn)動(dòng)體的那個(gè)運(yùn)動(dòng)參數(shù)受到控制:
2023-08-08 11:47:32806 現(xiàn)在PLC的運(yùn)動(dòng)控制功能越來(lái)越強(qiáng)了,圓弧插補(bǔ)、螺旋插補(bǔ)、電子凸輪都能輕松勝任了,那運(yùn)動(dòng)控制器和具備運(yùn)動(dòng)控制功能的PLC的差別在哪里,運(yùn)動(dòng)控制器以后的優(yōu)勢(shì)又在哪里?PLC及運(yùn)動(dòng)控制器發(fā)展到今天,它們
2023-08-08 08:09:46823 
點(diǎn)位運(yùn)動(dòng)控制:即僅對(duì)終點(diǎn)位置有要求,與運(yùn)動(dòng)的中間過(guò)程即運(yùn)動(dòng)軌跡無(wú)關(guān)。相應(yīng)的運(yùn)動(dòng)控制器要求具有快速的定位速度,在運(yùn)動(dòng)的加速段和減速段,采用不同的加減速控制策略。
2023-10-09 17:10:10556 在運(yùn)動(dòng)控制過(guò)程中,有時(shí)需要控制兩個(gè)運(yùn)動(dòng)軸在某個(gè)特定位置進(jìn)行調(diào)整,最終主從軸在另外一個(gè)特定的位置達(dá)到運(yùn)動(dòng)的同步。
2023-10-18 14:31:352554 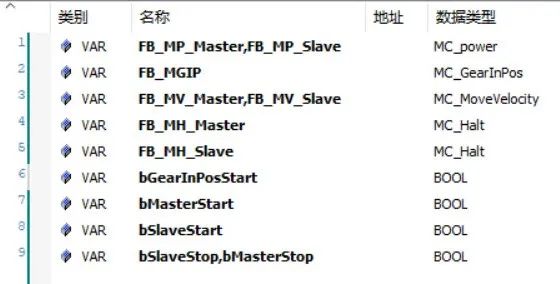
運(yùn)動(dòng)控制系統(tǒng)其實(shí)運(yùn)動(dòng)控制系統(tǒng)是一個(gè)比較大的系統(tǒng),就像前面的通信系統(tǒng)一樣,通常會(huì)由眾多的組成部分構(gòu)成。運(yùn)動(dòng)控制系統(tǒng)會(huì)綜合信號(hào)分析與處理、自動(dòng)控制、通信等的內(nèi)容。運(yùn)動(dòng)的要素抽象來(lái)講,運(yùn)動(dòng)的要素可概況
2023-10-25 08:07:52819 比較器沒(méi)遲滯誤觸發(fā)怎么通過(guò)外圍參數(shù)改善? 比較器的作用是將兩個(gè)輸入的信號(hào)進(jìn)行比較,輸出一個(gè)數(shù)字化的結(jié)果,用于控制電路的變化。然而,有些時(shí)候比較器可能會(huì)產(chǎn)生一些不必要的誤觸發(fā),這種情況下需要通過(guò)外圍
2023-10-31 14:48:27229 正運(yùn)動(dòng)硬件位置比較輸出和編碼器鎖存功能介紹。
2023-12-27 14:58:16182 
 電子發(fā)燒友App
電子發(fā)燒友App











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論