交流伺服系統(tǒng)包含交流伺服驅(qū)動器和伺服電機。選用伺服系統(tǒng),主要為了進行精密的定位控制,伺服驅(qū)動器在位置控制模式下運行,控制框圖如圖一所示。
2022-12-05 10:03:41 1734
1734 怎樣選擇步進和伺服電機?如何配用步進電機驅(qū)動器?2相和5相步進電機有何區(qū)別,如何選擇?何時選用直流伺服系統(tǒng),它和交流伺服有何區(qū)別?步進和伺服電機可以拆開檢修或改裝嗎?
2021-10-29 07:20:12
什么是伺服系統(tǒng)?伺服系統(tǒng)是由哪些部分組成的?伺服驅(qū)動器的原理是什么?伺服控制系統(tǒng)有哪幾種控制方式?
2021-10-11 08:03:33
驅(qū)動器和控制器監(jiān)測控制并向電機發(fā)出命令,來實現(xiàn)所需的性能。 伺服電機控制–轉(zhuǎn)矩模式 在轉(zhuǎn)矩模式下,電流環(huán)路控制電機,轉(zhuǎn)矩與電流成正比,因此伺服系統(tǒng)的控制器會從驅(qū)動器中獲得實際電機的電流,并以此來確定
2023-03-10 10:03:48
位置環(huán)和速度環(huán),一般不會出現(xiàn)步進電機的丟步或過沖的現(xiàn)象,控制性能更為可靠。六、速度響應(yīng)性能不同步進電機從靜止加速到工作轉(zhuǎn)速(一般為每分鐘幾百轉(zhuǎn))需要200~400毫秒。交流伺服系統(tǒng)的加速性能較好,以
2018-09-04 10:08:37
步進電機是一種離散運動的裝置,它和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國內(nèi)的數(shù)字控制系統(tǒng)中,步進電機的應(yīng)用十分廣泛。隨著全數(shù)字式交流伺服系統(tǒng)的出現(xiàn),交流伺服電機也越來越多地應(yīng)用于數(shù)字控制系統(tǒng)中
2021-06-28 14:04:56
目前國內(nèi)的數(shù)字控制系統(tǒng)中,步進電機的應(yīng)用十分廣泛。隨著全數(shù)字式交流伺服系統(tǒng)的出現(xiàn),交流伺服電機也越來越多地應(yīng)用于數(shù)字控制系統(tǒng)中。為了適應(yīng)數(shù)字控制的發(fā)展趨勢,運動控制系統(tǒng)中大多采用步進電機或全數(shù)字式交流伺服
2021-06-28 08:00:00
倍速鏈輸送具有哪些優(yōu)點?伺服電機和步進電機的控制方式有何區(qū)別?伺服電機和步進電機的過載特性有何區(qū)別?
2021-10-11 06:31:15
誤差形成原因與克服辦法伺服系統(tǒng)控制過程為:升速、恒速、減速和低速趨近定位點,整個過程都是位置閉環(huán)控制。減速和低速趨近定位點這兩個過程,對伺服系統(tǒng)的定位精度有很重要的影響。減速控制具體實現(xiàn)方法很多,常用
2023-03-08 09:37:19
伺服系統(tǒng)有哪幾種控制方式?伺服系統(tǒng)的工作原理是什么?有哪些性能?
2021-09-23 08:39:15
伺服系統(tǒng)由哪幾部分組成?伺服系統(tǒng)常用的參數(shù)有哪些?如何選擇伺服電機?伺服驅(qū)動器控制原理是什么?
2021-09-26 08:26:53
伺服系統(tǒng)國內(nèi)外研究現(xiàn)狀如何?伺服系統(tǒng)的發(fā)展趨勢是怎樣的?伺服系統(tǒng)相關(guān)技術(shù)是什么?
2021-09-30 07:29:16
伺服系統(tǒng)的機械時間常數(shù)是什么?伺服系統(tǒng)的電氣時間常數(shù)是什么?求大神解答
2021-09-30 08:16:25
交流伺服電機的工作原理伺服系統(tǒng)的組成及分類伺服馬達(交流)的特點伺服控制的選型步驟
2021-02-22 07:55:20
伺服系統(tǒng)配件有哪些?如何去安裝伺服系統(tǒng)?伺服驅(qū)動器與伺服電機是如何進行連接的?漏電開關(guān)有接地和沒接地的區(qū)別在哪?
2021-06-28 07:05:32
伺服系統(tǒng)控制框架是由哪些部分組成的?伺服系統(tǒng)控制包括哪些參數(shù)?
2021-10-11 09:05:11
伺服系統(tǒng)控制常見的加減速方式有幾種?分別是哪些?
2021-09-30 06:38:52
步進電機作為一種開環(huán)控制的系統(tǒng),和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國內(nèi)的數(shù)字控制系統(tǒng)中,步進電機的應(yīng)用十分廣泛。隨著全數(shù)字式交流伺服系統(tǒng)的出現(xiàn),交流伺服電機也越來越多地應(yīng)用于數(shù)字控制系統(tǒng)中
2020-06-30 15:39:11
步進電機和伺服步進電機的區(qū)別是什么?
2021-10-11 08:36:56
出現(xiàn)步進電機的丟步或過沖的現(xiàn)象,控制性能更為可靠。7. 度響應(yīng)性能不同步進電機從靜止加速到工作轉(zhuǎn)速需要上百毫秒,而交流伺服系統(tǒng)的加速性能較好,一般只需幾毫秒,可用于要求快速啟停的控制場合。`
2017-07-13 13:18:49
環(huán),一般不會出現(xiàn)步進電機的丟步或過沖的現(xiàn)象,控制性能更為可靠。六、速度響應(yīng)性能不同 步進電機從靜止加速到工作轉(zhuǎn)速(一般為每分鐘幾百轉(zhuǎn))需要200~400毫秒。交流伺服系統(tǒng)的加速性能較好,以松下MSMA
2016-08-19 22:01:04
1.開環(huán)進給伺服系統(tǒng) 開環(huán)進給伺服系統(tǒng)是數(shù)控機床中最簡單的伺服系統(tǒng),執(zhí)行元件一般為步進電機,其控制原理 開環(huán)進給伺服系統(tǒng)的精度較低,速度也受到步進電動機性能的限制。但由于其結(jié)構(gòu)簡單,易于調(diào)整
2023-03-21 17:53:51
步進電機是機電設(shè)備中廣泛使用的一種電機,以控制、驅(qū)動裝置構(gòu)成的步進電機伺服系統(tǒng)在經(jīng)濟型數(shù)控機床、機器人、工業(yè)過程控制及儀器儀表等領(lǐng)域得到了廣泛的應(yīng)用。過去由純電路設(shè)計的步進電機控制和驅(qū)動電路,往往
2011-03-05 14:22:48
基于Labview的氣動伺服系統(tǒng)辨識程序,哪位朋友做過的幫幫忙,搭建的系統(tǒng)跟論文《基于 LabVIEW 的氣動比例伺服系統(tǒng)模型辨識研究》中的模型一樣。
2016-04-19 15:56:52
急需希望找到一位做過基于單片機的步進電機伺服系統(tǒng)的技術(shù)大牛,指導(dǎo)設(shè)計,謝謝
2017-05-24 16:44:02
基于永磁同步電機伺服系統(tǒng)的控制算法是什么?如何對一種基于永磁同步電機伺服系統(tǒng)的控制算法進行仿真?
2021-07-13 08:12:47
如何正確選擇伺服電機和步進電機?選擇步進電機還是伺服電機系統(tǒng)?如何配用步進電機驅(qū)動器?2相和5相步進電機有何區(qū)別,如何選擇?何時選用直流伺服系統(tǒng),它和交流伺服有何區(qū)別?
2021-11-15 07:46:57
如何用STM32控制一個三軸伺服系統(tǒng)?
2021-09-26 08:56:25
變頻器是什么?伺服系統(tǒng)又是什么?變頻器與伺服系統(tǒng)的工作原理是什么?變頻器與伺服系統(tǒng)有什么共同點?變頻器與伺服系統(tǒng)的區(qū)別在哪些地方?
2021-07-05 06:43:48
和伺服機構(gòu)控制的重要部分。因而要了解機器人的運作過程,必然繞不過伺服系統(tǒng)。伺服系統(tǒng)伺服系統(tǒng)是以變頻技術(shù)為基礎(chǔ)發(fā)展起來的產(chǎn)品,是一種以機械位置或角度作為控制對象的自動控制系統(tǒng)。伺服系統(tǒng)除了可以進行速度與轉(zhuǎn)矩控制
2018-10-12 11:01:08
步進電機和伺服電機的控制精度有何區(qū)別?步進電機和伺服電機的低頻特性有何區(qū)別?
2021-09-30 08:23:52
在電機控制的變頻伺服系統(tǒng)中,電流傳感器的采樣精度和實時性很大程度上決定了系統(tǒng)的動、靜態(tài)性能。精確的電流檢測是提高系統(tǒng)控制精度、穩(wěn)定性和快速性的重要環(huán)節(jié),也是實現(xiàn)高性能閉環(huán)控制系統(tǒng)的關(guān)鍵。同時,當(dāng)電機發(fā)生堵轉(zhuǎn)或負(fù)載過重時,系統(tǒng)通過電流傳感器檢測到線路上發(fā)生過流,可以驅(qū)動IPM模塊實現(xiàn)關(guān)斷保護功能。
2020-05-01 08:34:25
隨著電液伺服控制理論的發(fā)展, 很多先進的控制策略被應(yīng)用于電液伺服控制領(lǐng)域中。如: 文獻[ 1 ]闡述了基本運算為不完全微分PID的濾波型二自由度控制算法, 針對飛行仿真轉(zhuǎn)臺用液壓伺服系統(tǒng)的特點進行了
2019-08-21 06:13:08
隨著電液伺服控制理論的發(fā)展, 很多先進的控制策略被應(yīng)用于電液伺服控制領(lǐng)域中。
2019-09-24 08:21:27
伺服系統(tǒng)是什么?伺服系統(tǒng)的主要作用有哪些?伺服系統(tǒng)主要分為哪幾類?對伺服系統(tǒng)的基本要求有哪些? 交流伺服電機和無刷直流伺服電機在功能上有什么區(qū)別?
2021-07-13 08:15:33
貼片機常用控制系統(tǒng)結(jié)構(gòu)主要包括下面兩方面,這兩方面主要實現(xiàn)的是點對點的位置控制。 (1)位置和速度反饋都來自伺服電動機本身 這種控制方式的優(yōu)點是對整個閉環(huán)伺服系統(tǒng)控制環(huán)路的要求較低,適用于
2018-09-04 16:04:08
數(shù)控機床的伺服系統(tǒng)一、 伺服系統(tǒng)的組成 數(shù)控機床的伺服系統(tǒng)按其功能可分為:進給伺服系統(tǒng)和主軸伺服系統(tǒng)。 主軸伺服系統(tǒng)用于
2008-12-30 16:12:52 60
60 本章將詳細(xì)討論進給伺服系統(tǒng)的軟件硬件結(jié)構(gòu);進給伺服系統(tǒng)基本功能的原理及實現(xiàn)方法。進給伺服系統(tǒng)是數(shù)控系統(tǒng)主要的子系統(tǒng)。如果說CNC裝置是數(shù)控系統(tǒng)的“大腦”,是發(fā)布
2009-02-16 00:21:310 數(shù)控機床的伺服驅(qū)動系統(tǒng):
開環(huán)步進式伺服驅(qū)動系統(tǒng) 開環(huán)步進式伺服驅(qū)動系統(tǒng)閉環(huán)伺服控制原理與系統(tǒng) 閉環(huán)伺服控制原理與系統(tǒng)CNC CNC伺服系統(tǒng) 伺服系統(tǒng)
2009-04-30 09:30:4645 伺服系統(tǒng)的扭矩控制(Toque Control)和速度控制(Velocity Control)?一般定位上的伺服系統(tǒng)之伺服馬達控制方式可分為扭矩控制(Toque Control)及速度控制(Velocity Control)兩類,這兩種控制方式都
2009-07-04 08:30:1253 泰科伺服生產(chǎn)的MT無刷伺服系統(tǒng)主要由IDM系列伺服驅(qū)動器與兼容NEMA法蘭尺寸的直流無刷伺服電機組合而成。采用直流供電,最大功率可達600W,主要應(yīng)用于小型移動機器人、自動化檢測組裝、醫(yī)療設(shè)備等行業(yè)
2023-04-20 10:45:52
本文介紹了一種基于51 單片機控制的高精度微波輻射計天線伺服系統(tǒng),詳細(xì)分析了其測角原理、定位精度、步進電機控制原理和RS485 接口的原理。實驗結(jié)果表明,該系統(tǒng)運行平穩(wěn)
2010-01-11 15:39:3130 DSP全模糊控制包裝機的凸輪定位差動器的交流伺服系統(tǒng)
[摘要] 根據(jù)裹包機的伺服系統(tǒng)控制精度較差的問題,提出由DSP實現(xiàn)的四個模糊控制器組成的全數(shù)字、高動態(tài)性能的凸
2010-04-02 15:25:0115 伺服系統(tǒng)的PID控制
伺服系統(tǒng)的摩擦動態(tài)特性是非常復(fù)雜的,目前已經(jīng)提出了許多摩擦模型。
2010-05-04 16:05:5351 伺服電機步進電機區(qū)別
伺服電機內(nèi)部的轉(zhuǎn)子是永磁鐵,驅(qū)動器控制的U/V/W三相電形成電磁場,轉(zhuǎn)子在此磁場的作用下轉(zhuǎn)動,同時電機
2010-01-09 20:24:1235775 傳統(tǒng) PID控制 在伺服系統(tǒng)高精度位置跟蹤和改善系統(tǒng)品質(zhì)方面已露出諸多不足,且系統(tǒng)中存在的控制干擾和測量噪聲會在很大程度上影響伺服系統(tǒng)的跟蹤精度。提出一種帶有卡爾曼濾波器
2011-07-06 16:05:35114 伺服系統(tǒng)按其驅(qū)動元件劃分,有步進式伺服系統(tǒng)、直流電動機伺服系統(tǒng)、交流電動機伺服系統(tǒng)。按控制方式劃分,有開環(huán)伺服系統(tǒng)、閉環(huán)伺服系統(tǒng)和半閉環(huán)伺服系統(tǒng)等。
2011-07-10 17:15:042298 
對Matlab語言的Fuzzy和Simulink工具進行介紹,分析了模糊PID服系統(tǒng)的PID控制和模糊PID控制進行仿真,從仿真結(jié)果對比來看,模糊小建模方法使用Matlab的Fuzzy和Simulink對伺PID控制對伺服系統(tǒng)具
2011-09-08 15:33:5353 伺服系統(tǒng)脈沖控制電路將產(chǎn)生用來控 制伺服系統(tǒng) 的脈沖。圖示的組件顯示這個伺服系統(tǒng)應(yīng)該產(chǎn)生一個90的總旋轉(zhuǎn)。
2011-11-03 16:33:193474 用液壓元件組成的伺服系統(tǒng)(什么是伺服系統(tǒng))稱為液壓伺服系統(tǒng),并且液壓伺服系統(tǒng)具有易于實現(xiàn)直線運動的速度位移及力控制,驅(qū)動力、力矩和功率大,尺寸小重量輕,加速性能好,響
2012-02-09 10:05:337075 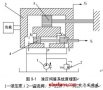
伺服系統(tǒng)的PID控制技術(shù)下載
伺服系統(tǒng)的PID控制技術(shù)下載
2015-12-09 16:46:538 位置伺服系統(tǒng)PID控制策略研究與應(yīng)用-2010。
2016-04-01 14:49:5617 高精度交流伺服系統(tǒng)的模糊PID雙模控制-2007。
2016-04-01 15:58:1620 基于DSP的電機伺服系統(tǒng)中的模糊PID控制-2011。
2016-04-01 17:23:0926 音圈電機伺服系統(tǒng)模糊PID控制-2010。
2016-04-06 14:21:4918 轉(zhuǎn)臺伺服系統(tǒng)模糊PID復(fù)合控制算法-2008。
2016-04-06 14:35:1214 基于SVPWM的PMSM矢量控制伺服系統(tǒng)研究。
2016-04-18 10:02:1723 交流永磁伺服系統(tǒng)技術(shù)講座第六講_八_交流永磁伺服系統(tǒng)的控制策略。
2016-04-26 10:47:0820 交流永磁伺服系統(tǒng)技術(shù)講座第六講_九_交流永磁伺服系統(tǒng)的控制策略
2016-04-26 10:47:089 交流永磁伺服系統(tǒng)技術(shù)講座第六講_七_交流永磁伺服系統(tǒng)的控制策略
2016-04-26 10:47:0821 交流永磁伺服系統(tǒng)技術(shù)講座第六講_十_交流永磁伺服系統(tǒng)的控制策略
2016-04-26 10:47:0810 交流永磁伺服系統(tǒng)技術(shù)講座第六講_十二_交流永磁伺服系統(tǒng)的控制策略。
2016-04-26 10:47:0818 交流永磁伺服系統(tǒng)技術(shù)講座第六講_十一_交流永磁伺服系統(tǒng)的控制策略
2016-04-26 10:47:0810 交流永磁伺服系統(tǒng)技術(shù)講座第四講_伺服系統(tǒng)的組成_三_
2016-04-26 10:47:0818 電液伺服系統(tǒng)位置和力模糊切換控制方法_高炳微
2017-01-07 17:01:100 直驅(qū)XY平臺伺服系統(tǒng)預(yù)測魯棒輪廓跟蹤控制_趙希梅
2017-01-07 15:26:081 模糊控制及其在液壓伺服系統(tǒng)中的應(yīng)用_余兵
2017-02-07 16:59:251 步進電機伺服系統(tǒng)是典型的開環(huán)控制系統(tǒng),指令信號是單向流動的。開環(huán)系統(tǒng)沒有位置和速度反饋回路,省去了檢測裝置,其精度主要由步進電機來決定,速度也受到步進電機性能的限制,系統(tǒng)簡單可靠,不需要像閉環(huán)伺服系統(tǒng)那樣進行復(fù)雜的設(shè)計計算與試驗驗證。
2017-06-12 15:32:5815223 
伺服系統(tǒng),亦稱隨動系統(tǒng),是一種能夠跟蹤輸入的指令信號進行動作,從而獲得精確的位置、速度或力輸出的自動控制系統(tǒng)。大多數(shù)伺服系統(tǒng)具有檢測反饋回路,因而伺服系統(tǒng)是一種反饋控制系統(tǒng)。
2017-06-12 16:01:227159 基于DSP控制的電液位置伺服系統(tǒng)電模擬仿真研究
2017-10-19 14:33:268 以快速、精確跟蹤為主要目標(biāo)的位置伺服系統(tǒng),是現(xiàn)代高科技各領(lǐng)域中不可缺少、應(yīng)用十分廣泛的一種自動控制系統(tǒng)。在歷經(jīng)開環(huán)、電氣.液壓、直流電氣伺服的發(fā)展歷程之后,現(xiàn)已進入交流電氣伺服迅猛發(fā)展的時代。本章
2017-11-08 09:59:217 伺服驅(qū)動系統(tǒng)(Servo System)簡稱伺服系統(tǒng),是一種以機械位置或角度作為控制對象的自動控制系統(tǒng),例如數(shù)控機床等。使用在伺服系統(tǒng)中的驅(qū)動電機要求具有響應(yīng)速度快、定位準(zhǔn)確、轉(zhuǎn)動慣量( 使用在機電
2017-11-10 16:05:0111712 本文開始介紹了伺服系統(tǒng)的概念和伺服系統(tǒng)主要作用,其次闡述了伺服系統(tǒng)的分類與基本要求,最后闡述了伺服系統(tǒng)主要特點和基本組成結(jié)構(gòu)。
2018-03-27 08:43:2418096 、實現(xiàn)主電機空載起動等優(yōu)點,會對刮板輸送機的鏈條、驅(qū)動電機起到保護作用,使設(shè)備平穩(wěn)起動、可靠運行。電液伺服系統(tǒng)具有負(fù)載能力強、功率密度大、響應(yīng)快、控制精度高等優(yōu)點,廣泛應(yīng)用于CST控制系統(tǒng)。 為使電液伺服系統(tǒng)達到更
2018-03-28 15:07:340 本文主要介紹什么是伺服系統(tǒng),首先介紹了伺服系統(tǒng)的結(jié)構(gòu)及特點,其次介紹了伺服系統(tǒng)作用、分類及性能要求和參數(shù),最后闡述了伺服系統(tǒng)的發(fā)展趨勢。
2018-04-28 17:08:5632921 本文首先介紹了伺服系統(tǒng)的組成,其次介紹了伺服系統(tǒng)的特點、作用及分類,最后闡述了伺服系統(tǒng)應(yīng)用領(lǐng)域、應(yīng)用趨勢及實例,具體的跟隨小編一起來了解一下。
2018-05-31 10:35:0315589 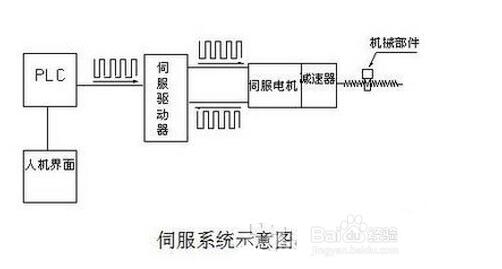
本文主要詳解PLC控制伺服系統(tǒng)步驟,首先介紹了PLC工作原理以及PLC控制伺服電機3種方式,其次闡述了西門子PLC控制的伺服控制系統(tǒng),具體的跟隨小編一起來了解一下。
2018-06-01 10:46:1250851 本文首先介紹了伺服系統(tǒng)技術(shù)的要求,其次闡述了伺服系統(tǒng)復(fù)合控制技術(shù)和非線性補償技術(shù),最后介紹了伺服系統(tǒng)常用的線性補償,具體的跟隨小編一起來了解一下。
2018-06-01 12:59:563974 本文主要詳解基于自抗擾控制的雙環(huán)伺服系統(tǒng),分別從ADRC抗干擾機理、伺服系統(tǒng)自抗擾控制、仿真研究以及實驗結(jié)果四個方面詳細(xì)解析,具體的跟隨小編一起來了解一下。
2018-06-01 14:44:287452 
伺服系統(tǒng)(servomechanism)又稱隨動系統(tǒng),是用來精確地跟隨或復(fù)現(xiàn)某個過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動控制系統(tǒng)。
2019-10-30 09:44:475961 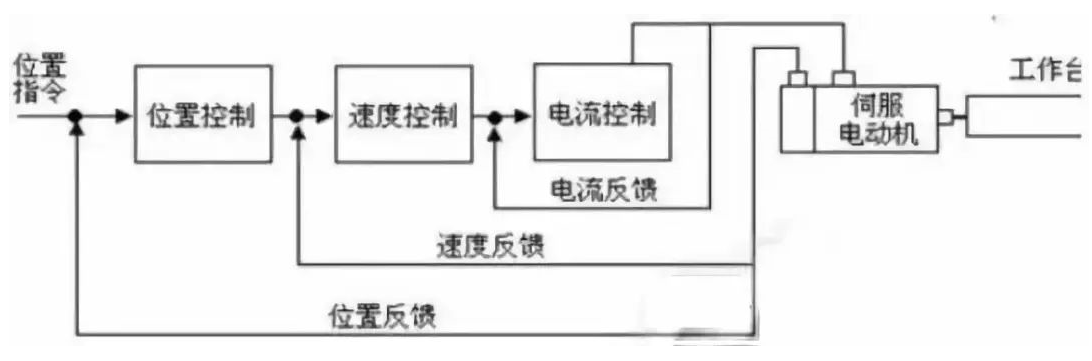
伺服系統(tǒng)是自動化生產(chǎn)里面的執(zhí)行機構(gòu),各類機械手想要做功,離不開伺服系統(tǒng)的幫助。伺服系統(tǒng)相比以往的其他電機,最大的優(yōu)點就是控制的精度高,因為其擁有編碼器結(jié)構(gòu),可以實現(xiàn)閉環(huán)控制。作為伺服系統(tǒng)的主體,運動
2022-06-02 14:32:292869 伺服系統(tǒng)的發(fā)展與伺服電機的發(fā)展緊密相聯(lián),經(jīng)歷了三個主要發(fā)展階段:20世紀(jì)60年代以前,以步進電動機驅(qū)動的液壓伺服馬達或以功率步進電動機直接驅(qū)動為中心,伺服系統(tǒng)的位置控制為開環(huán)系統(tǒng)。
2022-11-30 12:36:30785 伺服系統(tǒng)的工作原理 伺服系統(tǒng)(servomechanism)又稱隨動系統(tǒng),是用來精確地跟隨或復(fù)現(xiàn)某個過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意
2023-02-08 14:11:461788 下面,讓我們來看一下怎樣通過PLC來控制伺服系統(tǒng)吧。
1. 變量添加
在PLC 變量新建一個變量表,用來存儲伺服軸變量。
2023-02-13 15:37:595353 交流伺服系統(tǒng)按照電機類型的不同可以分為兩種:異步伺服系統(tǒng)和同步伺服系統(tǒng)。根據(jù)控制器的不同,交流伺服系統(tǒng)又可以分為模擬伺服系統(tǒng)和數(shù)字伺服系統(tǒng)。
2023-03-07 14:20:44949 機電伺服系統(tǒng)廣泛應(yīng)用于各種機械設(shè)備中,其種類和形式多種多樣。以下列舉一些常見的機電伺服系統(tǒng):
伺服電機系統(tǒng):伺服電機系統(tǒng)是一種利用電機控制機械運動的伺服系統(tǒng),它通常包括電機、編碼器、控制
2023-03-07 14:31:081421 ??步進電機作為一種開環(huán)控制的系統(tǒng),和現(xiàn)代數(shù)字控制技術(shù)有著本質(zhì)的聯(lián)系。在目前國內(nèi)的數(shù)字控制系統(tǒng)中,步進電機的應(yīng)用十分廣泛。隨著全數(shù)字式交流伺服系統(tǒng)的出現(xiàn),交流伺服電機也越來越多地應(yīng)用于數(shù)字控制系統(tǒng)
2023-03-21 14:55:020 步進電機伺服系統(tǒng)是典型的開環(huán)控制系統(tǒng),指令信號是單向流動的。開環(huán)系統(tǒng)沒有位置和速度反饋回路,省去了檢測裝置,其精度主要由步進電機來決定,速度也受到步進電機性能的限制,系統(tǒng)簡單可靠,不需要像閉環(huán)伺服系統(tǒng)那樣進行復(fù)雜的設(shè)計計算與試驗驗證。
2023-08-19 11:04:08440 
伺服系統(tǒng)主要由伺服控制器、驅(qū)動電路、伺服電動機及相應(yīng)反饋檢測器件組成。1.伺服系統(tǒng)原理當(dāng)人為的給定控制信號并被伺服控制系統(tǒng)接收時,執(zhí)行機構(gòu)就會按照控制信號的指令進行一系列的運動和動作;如果不再
2023-08-27 08:08:421729 
伺服系統(tǒng)(servomechanism)又稱 隨動系統(tǒng) ,是用來精確地跟隨或復(fù)現(xiàn)某個過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化
2023-09-27 10:30:361296 
按傳遞信號(指輸入和偏差信號)的元件不同可分為:①電液伺服系統(tǒng)(傳遞信號的元件為電氣元件);②機液伺服系統(tǒng)(傳遞信號的元件是機械裝置);③氣液伺服系統(tǒng)(傳遞信號的元件是氣動元件)。
2023-11-01 09:36:01401 交流伺服系統(tǒng)的分類及應(yīng)用場合交流伺服系統(tǒng)按照電機類型的不同可以分為兩種:異步伺服系統(tǒng)和同步伺服系統(tǒng)。根據(jù)控制器的不同,交流伺服系統(tǒng)又可以分為模擬伺服系統(tǒng)和數(shù)字伺服系統(tǒng)。異步伺服系統(tǒng):異步伺服系統(tǒng)
2023-11-03 08:07:41522 伺服系統(tǒng)(servomechanism)又稱隨動系統(tǒng),是用來精確地跟隨或復(fù)現(xiàn)某個過程的反饋控制系統(tǒng)。伺服系統(tǒng)使物體的位置、方位、狀態(tài)等輸出被控量能夠跟隨輸入目標(biāo)(或給定值)的任意變化的自動控制系統(tǒng)
2023-12-05 10:25:03479
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論