 電子發燒友App
電子發燒友App


實驗 模擬鎖相環與載波同步
一、?實驗目的
??? 1. 掌握模擬鎖相環的工作原理,以及環路的鎖定狀態、失鎖狀態、同步帶、捕捉帶等基本概念。
??? 2. 掌握用平方環法從2DPSK信號中提取相干載波的原理及模擬鎖相環的設計方法。
3. 了解相干載波相位模糊現象產生的原因。
二、?實驗內容
??? 1. 觀察模擬鎖相環的鎖定狀態、失鎖狀態及捕捉過程。
??? 2. 觀察環路的捕捉帶和同步帶。
3. 用平方環法從2DPSK信號中提取載波同步信號,觀察相位模糊現象。
三、?基本原理
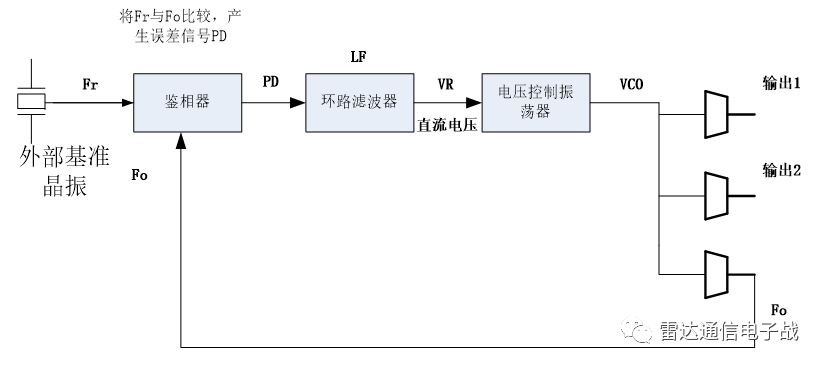
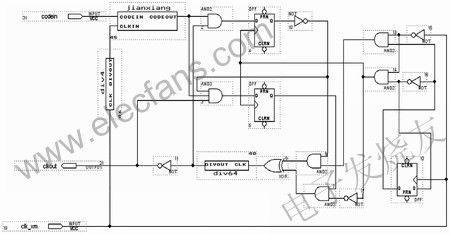
通信系統中常用平方環或同相正交環(科斯塔斯環)從2DPSK信號中提取相干載波。本實驗系統的載波同步提取模塊用平方環,原理方框圖如圖3-1所示,電原理圖如圖3-2所示(見附錄)。模塊內部使用+5V、+12V、-12V電壓,所需的2DPSK輸入信號已在實驗電路板上與數字調制單元2DPSK輸出信號連在一起。
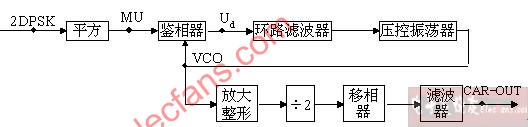
圖3-1? 載波同步方框圖
??? 本模塊上有以下測試點及輸入輸出點:
??? ? MU?????平方器輸出測試點,VP-P>1V
??? ? VCO????VCO輸出信號測試點,VP-P>0.2V
??? ? Ud?????鑒相器輸出信號測試點
??? ? CAR-OUT???相干載波信號輸出點/測試點
??? 圖3-1中各單元與電路板上主要元器件的對應關系如下:
??? ? 平方器????U25:模擬乘法器MC1496
??? ? 鑒相器????U23:模擬乘法器MC1496;U24:運放UA741
??? ? 環路濾波器???電阻R25、R68;電容C11
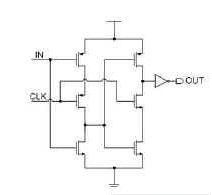
??? ? 壓控振蕩器???CRY2:晶體;N3、N4:三極管3DG6
? 放大整形???N5、N6:3DG6;U26:A:74HC04
??? ? ÷2????U27:D觸發器7474
??? ? 移相器????U28:單穩態觸發器7474
??? ? 濾波器????電感L2;電容C30
??? 下面介紹模擬鎖相環原理及平方環載波同步原理。
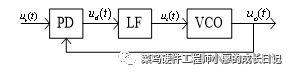
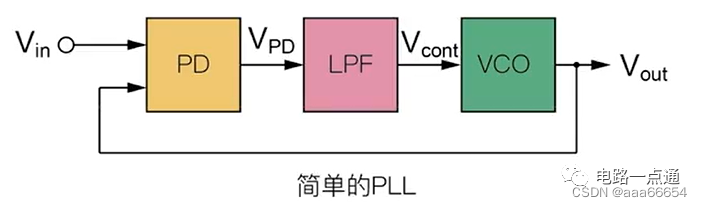
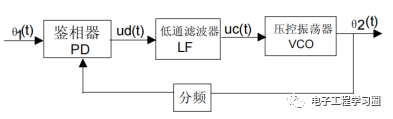
鎖相環由鑒相器(PD)、環路濾波器(LF)及壓控振蕩器(VCO)組成,如圖3-3所示。
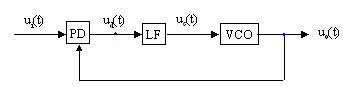
圖3-3? 鎖相環方框圖
??? 模擬鎖相環中,PD是一個模擬乘法器,LF是一個有源或無源低通濾波器。鎖相環路是一個相位負反饋系統,PD檢測ui(t)與uo(t)之間的相位誤差并進行運算形成誤差電壓ud(t),LF用來濾除乘法器輸出的高頻分量(包括和頻及其他的高頻噪聲)形成控制電壓uc(t),在uc(t)的作用下、uo(t)的相位向ui(t)的相位靠近。設ui(t)=Uisin[ωit+θi(t)],uo(t)=Uocos[ωit+θo(t)],則ud(t)=Udsinθe(t),θe(t)=θi(t)-θo(t),故模擬鎖相環的PD是一個正弦PD。設uc(t)=ud(t)F(P),F(P)為LF的傳輸算子,VCO的壓控靈敏度為K o,則環路的數學模型如圖3-4所示。
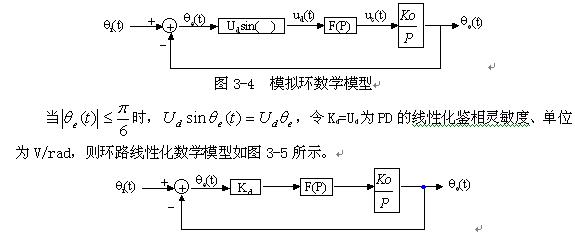
圖3-5? 環路線性化數學模型
??? 由上述數學模型進行數學分析,可得到以下重要結論:
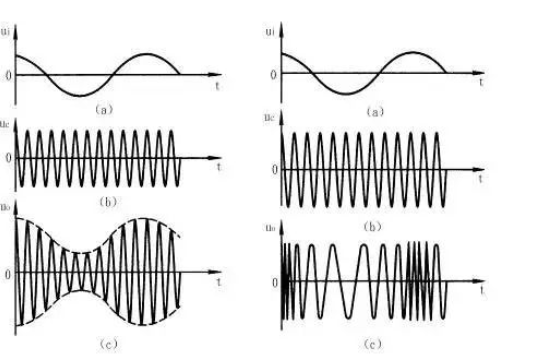
??? ? 當ui(t)是固定頻率正弦信號(θi(t)為常數)時,在環路的作用下,VCO輸出信號頻率可以由固有振蕩頻率ωo(即環路無輸入信號、環路對VCO無控制作用時VCO的振蕩頻率),變化到輸入信號頻率ωi,此時θo(t)也是一個常數,ud(t)、uc(t)都為直流。我們稱此為環路的鎖定狀態。定義Δωo=ωi-ωo為環路固有頻差,Δωp表示環路的捕捉帶,ΔωH表示環路的同步帶,模擬鎖相環中Δωp<ΔωH。當|Δωo|<ΔωP時,環路可以進入鎖定狀態。當|Δωo|<ΔωH時環路可以保持鎖定狀態。當|Δωo|>ΔωP時,環路不能進入鎖定狀態,環路鎖定后若Δωo發生變化使|Δωo|>ΔωH,環路不能保持鎖定狀態。這兩種情況下,環路都將處于失鎖狀態。失鎖狀態下ud(t)是一個上下不對稱的差拍電壓,當ωi>ωo,ud(t)是上寬下窄的差拍電壓;反之ud(t)是一個下寬上窄的差拍電壓。
??? ? 環路對θi(t)呈低通特性,即環路可以將θi(t)中的低頻成分傳遞到輸出端,θi(t)中的高頻成分被環路濾除。或者說,θo(t)中只含有θi(t)的低頻成分,θi(t)中的高頻成分變成了相位誤差θe(t)。所以當ui(t)是調角信號時,環路對ui(t)等效為一個帶通濾波器,離ωi較遠的頻率成分將被環路濾掉。
??? ? 環路自然諧振頻率ωn及阻尼系數ζ(具體公式在下文中給出)是兩個重要參數。ωn越小,環路的低通特性截止頻率越小、等效帶通濾波器的帶寬越窄;ζ越大,環路穩定性越好。
??? ? 當環路輸入端有噪聲時,θi(t)將發生抖動,ωn越小,環路濾除噪聲的能力越強。實驗一中的電荷泵鎖相環4046的性能與模擬環相似,所以它可以將一個周期不恒定的信號變為一個等周期信號。
??? 有關鎖相環理論的詳細論述,請讀者參閱文獻[3]。
對2DPSK信號進行平方處理后得
?,
此信號中只含有直流和2ωc頻率成分,理論上對此信號再進行隔直流和二分頻處理就可得到相干載波。鎖相環似乎是多余的,當然并非如此。實際工程中考慮到下述問題必須用鎖相環:
??? ? 平方電路不理想,其輸出信號幅度隨數字基帶信號變化,不是一個標準的二倍頻正弦信號。即平方電路輸出信號頻譜中還有其它頻率成分,必須濾除。
??? ? 接收機收到的2DPSK信號中含有噪聲(本實驗系統為理想信道,無噪聲),因而平方電路輸出信號中也含有噪聲,必須用一個窄帶濾波器濾除噪聲。
??? ? 鎖相環對輸入電壓信號和噪聲相當于一個帶通濾波器,我們可以選擇適當的環路參數使帶通濾波器帶寬足夠小。
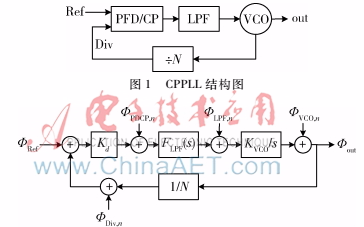
??? 對于本模擬環,ωn、ζ、環路等效噪聲帶寬BL及等效帶通濾波器的品質因數 的計算公式如下:

設計環路時通過測量得到Kd、Ko,一般選ζ值為0.5~1,根據任務要求選定ωn后即可求得環路濾波器的元件值。
當固有頻差為0時,模擬環輸出信號的相位超前輸入相位90?,必須對除2電路輸出信號進行移相才能得到相干載波。移相電路由兩個單穩態觸發器U28:A和U28:B構成。U28:A被設置為上升沿觸發,U28:B為下降沿觸發,故改變U28:A輸出信號的寬度即可改變U28:B輸出信號的相位,從而改變相干載波的相位。此移相電路的移相范圍小于90?。在鎖定狀態下微調C34也會改變輸出信號與輸入信號的相位關系(為什么,請思考)。
可對相干載波的相位模糊作如下解釋。在數學上對cos2ωct進行除2運算的結果是cosωct或-cosωct。實際電路也決定了相干載波可能有兩個相反的相位,因二分頻器的初始狀態可以為“0”也可以是“1”。
四、?實驗步驟
?? 本實驗使用數字信源單元、數字調制單元和載波同步單元。
??? 1.熟悉載波同步單元的工作原理。接好電源線,打開實驗箱電源開關。
??? 2.檢查數字信源單元和數字調制單元是否正常工作(用示波器觀察NRZ(AK)和2DPSK信號有無,兩者邏輯關系正確與否)。
??? 3. 用示波器觀察載波同步模塊鎖相環的鎖定狀態、失鎖狀態,測量環路的同步帶、捕捉帶。
??? 環路鎖定時ud為直流、環路輸入信號頻率等于反饋信號頻率(此鎖相環中即等于VCO信號頻率)。環路失鎖時ud為差拍電壓,環路輸入信號頻率與反饋信號頻率不相等。本環路輸入信號頻率等于2DPSK載頻的兩倍,即等于調制單元CAR信號頻率的兩倍。環路鎖定時VCO信號頻率等于CAR-OUT信號頻率的兩倍。所以環路鎖定時調制單元的CAR和載波同步單元的CAR-OUT頻率完全相等。
根據上述特點可判斷環路的工作狀態,具體實驗步驟如下:
(1)觀察鎖定狀態與失鎖狀態
打開電源后用示波器觀察ud,若ud為直流,則調節載波同步模塊上的可變電容C34,ud隨C34減小而減小,隨C34增大而增大(為什么?請思考),這說明環路處于鎖定狀態。用示波器同時觀察調制單元的CAR和載波同步單元的CAR-OUT,可以看到兩個信號頻率相等。若有頻率計則可分別測量CAR和CAR-OUT頻率。在鎖定狀態下,向某一方向變化C34,可使ud由直流變為交流,CAR和CAR-OUT頻率不再相等,環路由鎖定狀態變為失鎖。
接通電源后ud也可能是差拍信號,表示環路已處于失鎖狀態。失鎖時ud的最大值和最小值就是鎖定狀態下ud的變化范圍(對應于環路的同步范圍)。環路處于失鎖狀態時,CAR和CAR-OUT頻率不相等。調節C34使ud的差拍頻率降低,當頻率降低到某一程度時ud會突然變成直流,環路由失鎖狀態變為鎖定狀態。
(2)測量同步帶與捕捉帶
環路處于鎖定狀態后,慢慢增大C34,使ud增大到鎖定狀態下的最大值ud1(此值不大于+12V);繼續增大C34,ud變為交流(上寬下窄的周期信號),環路失鎖。再反向調節減小C34,ud的頻率逐漸變低,不對稱程度越來越大,直至變為直流。記環路剛剛由失鎖狀態進入鎖定狀態時鑒相器輸出電壓為ud2;繼續減小C34,使ud減小到鎖定狀態下的最小值ud3;再繼續減小C34,ud變為交流(下寬上窄的周期信號),環路再次失鎖。然后反向增大C34,記環路剛剛由失鎖狀態進入鎖定狀態時鑒相器輸出電壓為ud4。
令ΔV1=ud1- ud3,ΔV2=ud2- ud4,它們分別為同步范圍內及捕捉范圍內環路控制電壓的變化范圍,可以發現ΔV1>ΔV2。設VCO的靈敏度為K0(HZ/V),則環路同步帶ΔfH及捕捉帶ΔfP分別為:ΔfH =K0ΔV1/2 ,ΔfP =K0ΔV2/2 。
應說明的是,由于VCO是晶體壓控振蕩器,它的頻率變化范圍比較小,調節C34時環路可能只能從一個方向由鎖定狀態變化到失鎖狀態,此時可用ΔfH =K0(ud1-6)或ΔfH =K0(6-ud3)、ΔfP =K0(ud2-6)或ΔfP =K0(6-ud4)來計算同步帶和捕捉帶,式中6為ud變化范圍的中值(單位:V)。
作上述觀察時應注意:
? ud差拍頻率低但幅度大,而CAR和CAR-OUT的頻率高但幅度很小,用示波器觀察這些信號時應注意幅度旋鈕和頻率旋鈕的調整。
? 失鎖時,CAR和CAR-OUT頻率不相等,但當頻差較大時,在鑒相器輸出端電容的作用下,ud幅度較小。此時向某一方向改變C34,可使ud幅度逐步變大、頻率逐步減小、最后變為直流,環路進入鎖定狀態。
??? ? 環路鎖定時,ud不是一個純凈的直流信號,在直流電平上疊加有一個很小的交流信號。這種現象是由于環路輸入信號不是一個純凈的正弦信號所造成的。
??? 4. 觀察環路的捕捉過程
??? 先使環路處于失鎖定狀態,慢慢調節C34,使環路剛剛進入鎖定狀態后,關閉電源開關,然后再打開電源,用示波器觀察ud,可以發現ud由差拍信號變為直流的變化瞬態過程。ud的這種變化表示了環路的捕捉過程。
??? 5. 觀察相干載波相位模糊現象
使環路鎖定,用示波器同時觀察調制單元的CAR和載波同步單元的CAR-OUT信號,調節電位器P1或微調電容C34使兩者成為反相或同相。反復斷開、接通電源可以發現這兩個信號有時同相、有時反相。
五、實驗報告要求
1.?總結鎖相環鎖定狀態及失鎖狀態的特點。
2.?設K0=18 HZ/V ,根據實驗結果計算環路同步帶ΔfH及捕捉帶ΔfP 。

4.?總結用平方環提取相干載波的原理及相位模糊現象產生的原因。
5.?設VCO固有振蕩頻率f0 不變,環路輸入信號頻率可以改變,試擬訂測量環路同步帶及捕捉帶的步驟。
更多鎖相環知識請訪問 http://www.qldv.cn/zhuanti/PLL.html















 工商網監
工商網監
評論