 電子發燒友App
電子發燒友App


擁有(昂貴)設備和相應經驗的工廠專家應進行適當的控制回路相位和增益測量。對于那些無法訪問其中一個或任何一個的人,還有另一種選擇。
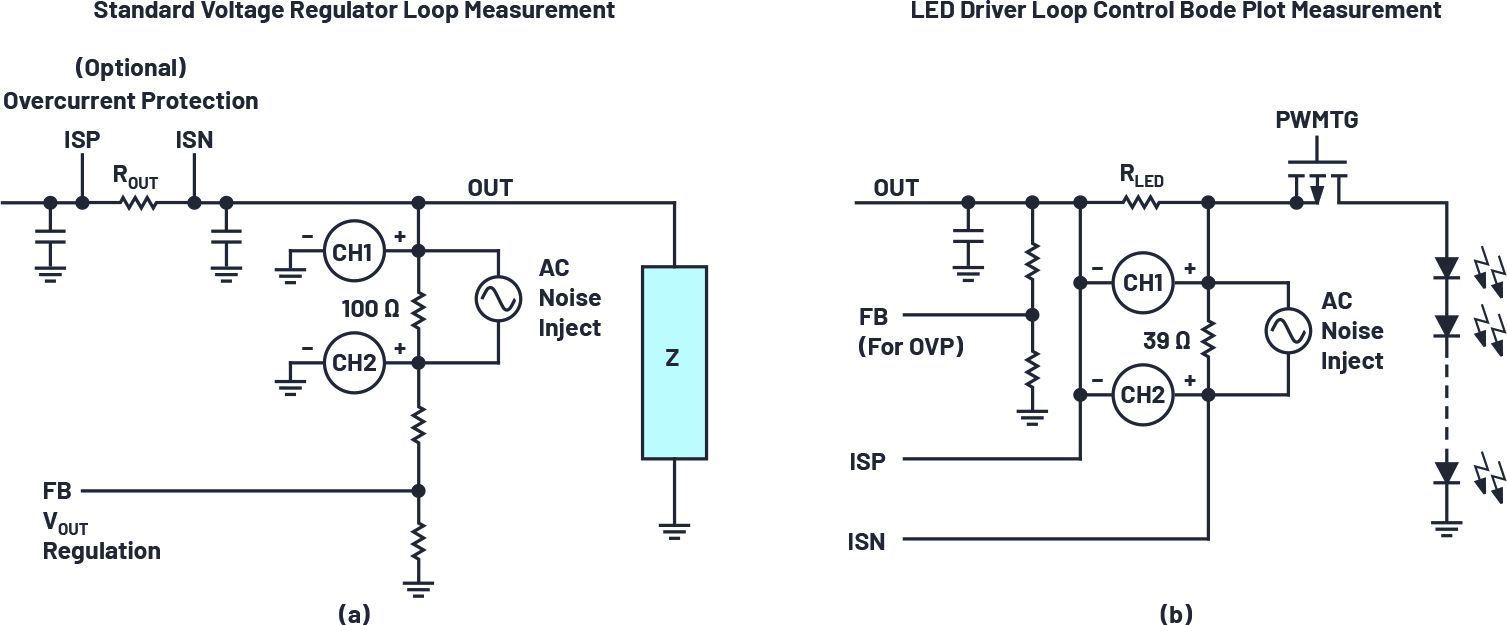
閉環增益和相位圖是用于確定開關穩壓器中控制環路穩定性的常用工具。正確進行增益和相位測量時,需要訪問和熟悉精美的網絡分析儀。測量包括斷開控制環路、注入噪聲以及在頻率掃描中測量所得增益和相位(參見圖 1)。這種測量控制回路的做法很少應用于 LED 驅動器。
LED 驅動器控制環路相位和增益測量需要不同的方法(參見圖 1)——偏離典型的電阻分壓器路徑到 GND 穩壓器注入和測量點。在這兩種情況下,臺式控制環路相位和增益測量是保證穩定性的最佳方式,但并非每個工程師都可以輕松獲得所需的設備并訪問經驗豐富的工廠應用程序團隊。這些工程師是做什么的?
一種選擇是構建 LED 驅動器并查看它如何響應瞬變。瞬態響應觀察需要應用板和更常見的臺式設備。瞬態分析的結果缺少波特圖基于頻率的增益和相位數(可用于保證穩定性),但它們可以作為一般控制回路穩定性和速度的指標。
大信號瞬態可用于檢查絕對偏差和系統響應時間。瞬態干擾的形狀表示相位或增益裕度,因此可用于了解一般環路穩定性。例如,臨界阻尼響應可能表示 45° 到 60° 的相位裕度。或者,瞬態期間的大尖峰可能表明需要更多的 COUT 或更快的環路。較長的建立時間可能表明需要加快環路的帶寬(和交叉頻率)。這些相對簡單的系統檢查能夠對開關穩壓器的控制環路進行動態表征,但需要增益和相位波特圖進行更深入的分析。
LTspice 仿真可用于在組裝或制造電路之前生成開關穩壓器輸出瞬態和波特圖。這有助于粗略了解控制回路的穩定性——補償元件選擇和輸出電容器尺寸的起點。根據 Middlebrook 在 1975 年的最初建議使用 LTspice 的過程有充分的記錄(請參閱“ LTspice:生成 SMPS 波特圖的基本步驟”)。 1 Middlebrook 方法中規定的實際信號注入位置現在并不常用,但多年來一直在調整,導致常用的注入位置如圖 1a 所示。
此外,帶有高邊檢測電阻器和復雜交流電阻 LED 負載的 LED 驅動器的注入點應該與今天的注入點或 Middlebrook 在反饋路徑中的原始建議不同,這是以前未在 LTspice 中展示的。此處介紹的方法展示了如何在 LTspice 和實驗室中生成 LED 驅動器電流檢測反饋環路波特圖。
生成控制環波特圖
標準開關穩壓器控制回路波特圖產生三個關鍵測量值,可用于確定穩定性和速度:
相位裕度
交叉頻率(帶寬)
獲得利潤
人們普遍認為,穩定的系統需要 45° 至 60° 的相位裕度,而保證環路穩定性則需要 –10 dB 的增益裕度。交叉頻率與一般環路速度有關。圖 1 顯示了使用網絡分析儀進行這些測量的設置。
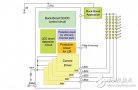
LTspice 仿真可用于在 LED 的控制回路中創建類似的注入和測量。圖 2 顯示了一個 LED 驅動器 ( LT3950 ),其具有給定頻率 (f) 的理想正弦波,直接注入負檢測線 (ISN) 上的反饋路徑。測量點 A、B 和 C 用于計算注入頻率 (f) 下的增益 (dB) 和相位 (°)。為了繪制整個控制環路波特圖,必須在大頻率掃描中重復該測量,在 fSW/2(轉換器開關頻率的一半)處停止。
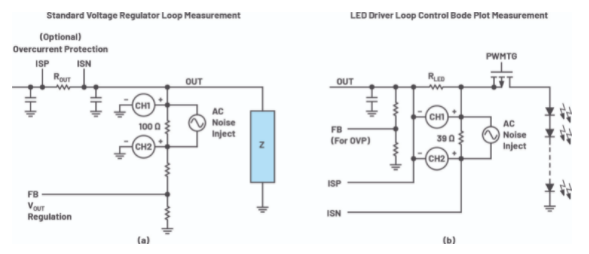
圖 1. 使用網絡分析儀對 (a) 穩壓器和 (b) LED 驅動器進行的開關穩壓器控制環路波特圖測量。為了進行測量,控制環路被破壞,正弦擾動推入高阻抗路徑,同時測量得到的控制環路增益和相位,使設計人員能夠量化環路的穩定性。

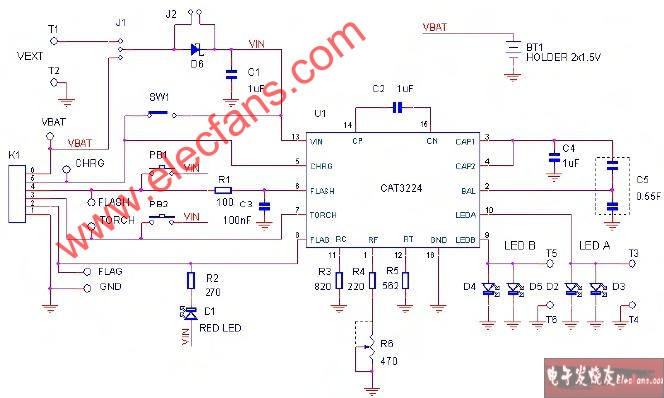
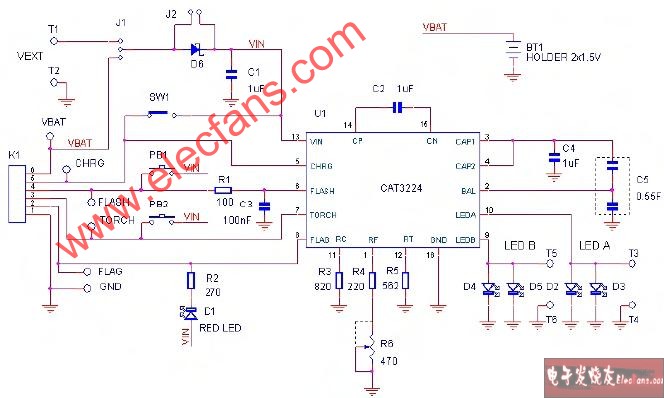
圖 2. 具有控制環路噪聲注入和測量點的 LT3950 DC2788A 演示電路 LED 驅動器 LTspice 模型。
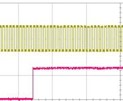
圖 2 中點 A、B 和 C 的測量確定了控制回路在注入頻率 (f) 下的增益和相位。不同的注入頻率產生不同的增益和相位。為簡單起見,并了解其工作原理,可以設置注入頻率并測量 AC 和 BC 的增益和相位。這會產生控制回路波特圖的單個頻率點。圖 3a 和 3b 顯示了 10 kHz ±10 mV AC 注入的增益和相位。圖 3c 和 3d 顯示了 40 kHz ±10 mV AC 注入的增益和相位。
頻率掃描以及 BC 和 AC 之間的增益和相位測量構成了整個閉環波特圖。正如摘要中提到的,這通常是在工作臺上使用花哨的(即昂貴的)網絡分析儀完成的。在 LTspice 中也可以進行這種掃描,如圖 4 所示。通過將它們與使用網絡分析儀的臺式測試結果進行比較來確認這些結果(參見圖 8)。

圖 3. 圖 2 中 A、B 和 C 點的測量確定了注入頻率 (f) 下控制回路的增益和相位。不同的注入頻率產生不同的增益和相位。圖 3a 和 3b 顯示了 10 kHz ±10 mV AC 注入的增益和相位。圖 3c 和 3d 顯示了 40 kHz ±10 mV AC 注入的增益和相位。頻率掃描以及 BC 和 AC 之間的增益和相位測量構成了閉環波特圖。
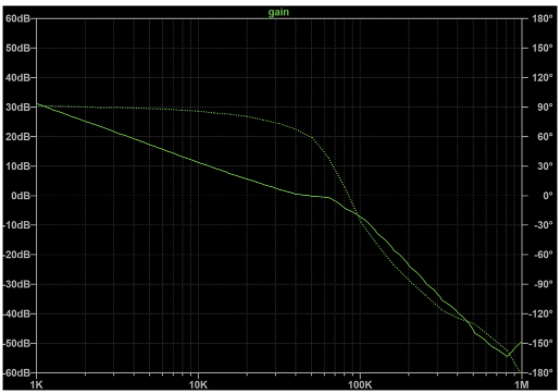
圖 4. 使用 LTspice 中的 LT3950 進行的波特圖測量顯示增益(實線)和相位(虛線)。
在 LTspice 中進行全增益和相位掃描和繪圖
要在控制回路的 LTspice 中創建完整的波特圖、增益和相位的圖形掃描,請按照以下步驟操作。
第 1 步:創建交流注入源
在 LTspice 中,插入 ±10 mV 交流注入電壓源和注入電阻,并標記節點 A、B 和 C,如圖 2 所示。交流電壓源值 SINE(0 10m {Freq}) 設置 10 mV 峰值并掃描頻率。用戶可以使用 1 mV 和 20 mV 之間的峰值正弦值。請記住,許多 LED 驅動器的感應電壓為 250 mV 和 100 mV。較高的注入噪聲會產生 LED 電流調節誤差。
第 2 步:添加數學
在原理圖上插入 .measure 語句作為 .sp (SPICE) 指令。這些指令執行傅里葉變換并計算 LED 驅動器的復雜開環增益和相位(以 dB 和相位為單位)。
以下是指令:
.measure Aavg 平均 V(a)-V(c)
.measure Bavg avg V(b)-V(c)
.measure 是 avg (V(a)-V(c)-Aavg)*cos(360*time*Freq)
.measure Aim avg -(V(a)-V(c)-Aavg)*sin(360*time*Freq)
.measure Bre avg (V(b)-V(c)-Bavg)*cos(360*time*Freq)
.measure Bim avg -(V(b)-V(c)-Bavg)*sin(360*time*Freq)
.measure GainMag 參數 20*log10(hypot(Are,Aim) / hypot(Bre,Bim))
.measure GainPhi 參數 mod(atan2(Aim, Are) - atan2(Bim, Bre)+180,360)-180
步驟 3:設置測量參數
需要更多的小指令。首先,為了進行正確的測量,電路必須處于模擬的穩定狀態(過去的啟動)。調整 t0 或測量的開始時間和停止時間。通過啟動仿真并觀察啟動時間,可以估計或獲取啟動時間。在達到穩定狀態后,停止時間選擇為 10/freq 或 10 個周期 - 通過對每個頻率平均超過 10 個周期來減少錯誤。
以下是指令:
.param t0=0.2m
.tran 0 {t0+10/freq} {t0} 啟動
.step oct 參數頻率 1K 1M 3
第 4 步:設置頻率采樣步長和范圍
.step 命令設置執行分析的頻率分辨率和范圍。在本例中,仿真從 1 kHz 運行到 1 MHz,分辨率為每倍頻程三個點。波特圖測量精度高達 fSW/2,因此頻率上限應設置為系統開關頻率的一半。顯然,更多的點可以提高分辨率,但模擬需要更長的時間。每倍頻程三個點是分辨率的低端,但以最小分辨率運行模擬可以節省一些時間。然而,從整體設計周期圖來看,5 分鐘的仿真比設計、組裝和測試 PCB 快幾個數量級。考慮到這一點,您可能只想以更高的分辨率運行,例如每倍頻程五個或更多點,以產生更完整且更易于查看的結果。
第 5 步:運行模擬
看起來很簡單,但 LTspice 需要多個生產步驟來生成波特圖。第一步是運行仿真,它不會(還)產生繪圖,而是顯示正常的示波器電壓和電流測量值。按照接下來的步驟生成波特圖。
第 6 步:生成波特圖
通過右鍵單擊原理圖窗口并選擇 Plot .step‘ed .meas data 打開 SPICE 錯誤日志。從 Plot Settings Menu 中選擇 Visible Traces 并選擇 Gain 以繪制數據。或者,可以通過單擊文件并選擇將數據導出為文本來導出測量數據,以生成波特數據的 CSV 文件。
使用網絡分析儀確認波特圖——超越模擬
控制回路的模擬不如真實的那樣可靠,不應用于完全保證回路穩定性和裕度。在設計過程的某個階段,應使用網絡分析儀工具在實驗室中驗證控制回路。
LTspice 中生成的波特圖可以與網絡分析儀波特圖測量結果進行比較。就像模擬一樣,實際的環路測量是通過將噪聲注入反饋環路并測量和處理 AB 和 AC 增益和相位來捕獲的。測量設置原理圖和照片如圖 5 至圖 7 所示。

圖 5. 使用網絡分析儀的 LED 驅動器控制環路波特圖測量設置。
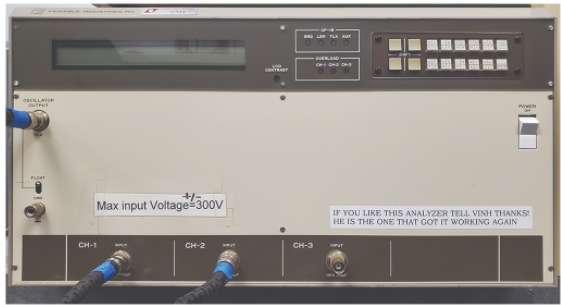
圖 6. Venable System 5060A 老式網絡分析儀,用于 LED 驅動器的高端浮動噪聲注入和測量。

圖 7. LT3950 LED 驅動器上的噪聲注入和測量點。
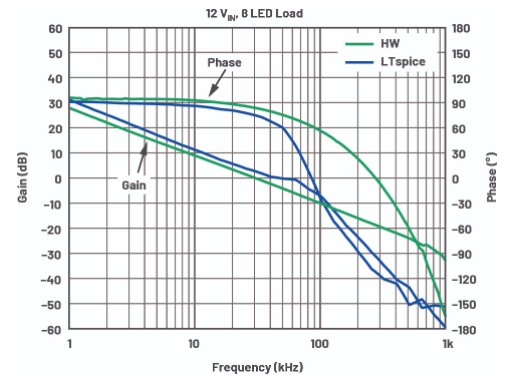
圖 8. LT3950 LED 驅動器在 DC2788A 演示電路上的波特圖。通過 LTspice 模擬(藍線)生成的圖與使用網絡分析儀(綠線)生成的圖具有很強的相關性。
表 1. LT3950 LED 驅動器的 LTspice 與網絡分析儀的波特圖測量數據比較

LTspice 仿真結果顯示與網絡分析儀數據有很強的相關性,證明 LTspice 是 LED 驅動器設計中的一個有用工具——生成粗略的基線以幫助工程師縮小組件選擇范圍。較低頻率的增益和相位緊跟硬件,較高頻率的仿真和硬件數據之間的差異更大。這可能代表了對高頻極點、零點、寄生電感、電容和等效串聯電阻進行建模的挑戰。
結論
LTspice 建模可用于測量控制環路增益和相位,從而為 LED 驅動器生成波特圖。LTspice 仿真數據的準確性取決于所使用的 SPICE 模型的準確性,盡管仔細建模每個組件以考慮實際行為是以增加仿真時間為代價的。出于 LED 驅動器設計的目的,即使沒有完美的組件建模,LTspice 數據也可用于相對快速地縮小組件范圍和預測一般電路行為。工作仿真有助于在過渡到硬件實現之前指導設計工程師,從而節省整體設計時間。
作者:Keith Szolusha ,Brandon Nghe
審核編輯:郭婷









 工商網監
工商網監
評論