本文主要詳解基于FPGA的模糊PID控制器的設(shè)計實現(xiàn),首先介紹了FPGA工作原理、基本特點以及FPGA的優(yōu)勢,其次闡述了使用Altera的FPGA設(shè)計實現(xiàn)的數(shù)字模糊PID控制器,具體的跟隨小編一起來了解一下。
2018-06-01 09:26:51 15747
15747 一個重要的研究方向。本文重點介紹了模糊自適應(yīng)控制器和常規(guī)PI 控制器組成的模糊自適應(yīng)PI 控制器的設(shè)計方法,并用這種方法設(shè)計了一個有源功率因數(shù)校正(APFC)系統(tǒng)。通過MATLAB 仿真表明,引入模糊PI 控制設(shè)計的APFC 系統(tǒng)具有響應(yīng)快,穩(wěn)態(tài)精度高,功率因數(shù)提高顯著的優(yōu)點。
2018-10-09 09:11:004330 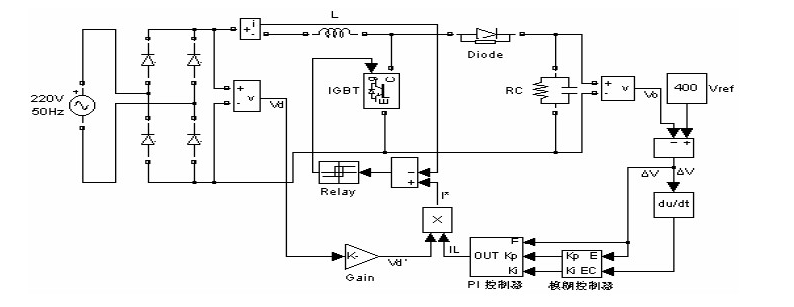
,誤差較小時采用模糊PID控制,實現(xiàn)了2種控制方法的優(yōu)勢互補。 同時在此基礎(chǔ)上,給出了Fuzzy PID控制器設(shè)計、硬件結(jié)構(gòu)和軟件設(shè)計,實驗曲線表明該控制算法可以獲得滿意的控制效果,采用模糊PID控制的效果明顯優(yōu)于常規(guī)PID控制。
2019-05-30 10:38:57
一種模糊自適應(yīng)PID控制方法https://bbs.elecfans.com/jishu_260252_1_1.html
2012-08-18 09:55:43
模糊系統(tǒng)建模應(yīng)用-自適應(yīng)模糊控制.zip
2018-01-07 12:16:28
本帖最后由 夜魄Y 于 2020-3-24 07:41 編輯
如何將labview中的模糊控制器和pid結(jié)合在一起,利用模糊化后自動調(diào)整pid的三個參數(shù)Kp、KI、Kd,希望有簡單的例子可以用來探討。懂得人也可以互相討論哦。
2020-03-17 08:41:43
,解決內(nèi)部參數(shù)攝動和外部負載擾動對系統(tǒng)影響的問題,提出一種永磁同步電機模糊自整定自適應(yīng)積分反步控制方法。將dq軸電流誤差積分項引入自適應(yīng)反步控制器控制律中,構(gòu)成自適應(yīng)電流誤差積分反步控制器,實現(xiàn)對dq軸電流給定的精確跟蹤,提高dq軸電流控制系統(tǒng)對內(nèi)部參數(shù)攝動的魯棒性。在此基礎(chǔ)上,設(shè)計模糊推理模塊,應(yīng)
2021-08-27 07:31:45
基于模糊系統(tǒng)逼近的自適應(yīng)控制.doc
2017-09-24 11:30:36
基于模糊系統(tǒng)逼近的自適應(yīng)控制的Matlab源代碼.zip
2017-09-24 11:28:26
基于模糊系統(tǒng)逼近的自適應(yīng)控制(含Matlab程序).zip
2017-09-24 11:04:03
量分別為電壓誤差E和電壓誤差變化率EC.輸出量分別為傳統(tǒng)PID控制器的KP,KI,KD的調(diào)整系數(shù)KKP,KKI,KKD.這樣可以使模糊控制器自適應(yīng)PID參數(shù)的設(shè)定值,而不用一同調(diào)節(jié)其中參數(shù)。由于直接由
2018-10-08 15:32:09
模糊自適應(yīng)PID控制原理及結(jié)構(gòu)是什么?如何去設(shè)計恒溫箱溫度控制系統(tǒng)硬件電路?
2021-05-07 07:05:16
模糊PID溫度控制系統(tǒng)的硬件電路包括哪幾部分呢?如何去設(shè)計一種基于STM32控制器的模糊PID溫度控制系統(tǒng)呢?
2021-12-23 07:08:20
溫度是工業(yè)生產(chǎn)過程中一個主要的被控參數(shù)。目前,大多采用常規(guī)PID控制器實現(xiàn)對溫度的控制。
2019-11-04 06:01:42
PID控制的原理是什么?怎樣去編寫PID控制器和模糊控制器代碼呢?如何對PID控制器和模糊控制器進行仿真呢?
2021-11-19 07:47:47
最近在用電機驅(qū)動控制壓力,采用PID控制方式,但是效果并不理想,哪位大神給發(fā)一個自適應(yīng)PID的程序,不勝感激
2019-01-22 22:05:20
如何去設(shè)計模糊PID自整定控制器?關(guān)于模糊控制器算法的研究是什么?模糊PID控制器具有哪些特點?
2021-04-21 06:08:28
針對煉鋼廠水站系統(tǒng)中的氧槍槍位控制,設(shè)計了一種自適應(yīng)模糊控制器。根據(jù)控制器輸出誤差在線調(diào)整參數(shù),并按照氧槍槍位隨流量變化的規(guī)律進行連續(xù)調(diào)節(jié),給出相應(yīng)的自適應(yīng)
2009-02-10 15:33:48 27
27 文中將PID控制器在工程整定方法的基礎(chǔ)上,對 PID參數(shù)作歸一化處理,然后通過模糊控制規(guī)則和模糊推理確定對PID 的參數(shù)進行調(diào)節(jié),提出了一種新型的模糊PID 算法。從而使 PID 控制器
2009-04-10 10:47:2227 在對傳統(tǒng)PID 控制器分析的基礎(chǔ)上,結(jié)合現(xiàn)代模糊控制理論,設(shè)計了一個自適應(yīng)-模糊PID 控制器,并將其應(yīng)用于變頻調(diào)速恒壓供水系統(tǒng)中。它彌補了采用單純PID 控制器,難以保證系
2009-05-26 10:19:1539 提出了一種模糊自適應(yīng)PID 算法。利用模糊自適應(yīng)PID 算法對柴油機電子調(diào)速器PID參數(shù)按調(diào)速系統(tǒng)過渡過程進行模糊自整定。從仿真結(jié)果看調(diào)速性能有明顯改善。關(guān)鍵詞:模糊P
2009-05-26 13:41:5935 介紹了通過自適應(yīng)模糊PID 控制器實現(xiàn)氯乙烯聚合反應(yīng)釜溫度控制的設(shè)計思想,由于聚合反應(yīng)釜的大慣性、大滯后的特性,采用常規(guī)的PID 調(diào)節(jié)產(chǎn)生嚴重的滯后效應(yīng)和超調(diào)現(xiàn)象,難以
2009-06-01 10:36:1513 電阻爐模型參數(shù)具有隨溫度而變化的時變特性,當溫度大范圍變化時,采用常規(guī)PID 控制方法不能滿足較高工藝要求,為此,本文應(yīng)用一種參數(shù)自適應(yīng)模糊PID 控制方法,并設(shè)計了基于單
2009-06-09 08:42:0435 本文對于多變量自適應(yīng)解耦控制與PID 控制相組合,這一工業(yè)過程控制的重要設(shè)計方法,主要是對一些控制算法和全局收斂性分析等問題,進行了研究和探索。關(guān)鍵詞:自適應(yīng)
2009-06-12 11:34:428 在利用T-S 模糊模型對未知函數(shù)逼近的基礎(chǔ)上,針對一類含未知非線性函數(shù)和外界干擾的復(fù)雜系統(tǒng),設(shè)計一種直接魯棒自適應(yīng)模糊控制器。此控制器學(xué)習參數(shù)只有一個,工程技術(shù)上容
2009-06-18 08:12:2620 針對常規(guī)PID 在張力控制中控制參數(shù)難以整定的問題,設(shè)計出一種基于模糊控制原理的自適應(yīng)PID 控制器,根據(jù)偏差和偏差變化率來實時調(diào)整KP , KI , KD參數(shù)。經(jīng)過實踐表明,這種模糊自
2009-07-09 08:59:5626 本文針對傳統(tǒng)PID 控制器在冷卻機應(yīng)用中存在的問題,提出了一種自適應(yīng)PID 控制器實現(xiàn)冷卻機熟料料層的自動控制。在給出冷卻機高溫熟料料層厚度的測量方法之后,提出了模糊控制
2009-07-30 11:09:1411 本文主要介紹了采用有監(jiān)督Hebb 學(xué)習算法的單神經(jīng)元自適應(yīng)PID 控制器以及采用以輸出誤差平方為性能指標的單神經(jīng)元自適應(yīng)PID 控制器的控制算法及其仿真實現(xiàn),總結(jié)出了兩種基于單
2009-07-30 16:34:0036 pH中和過程具有時滯、不確定、非線性特性,采用模糊自適應(yīng)PID控制器能有效解決這一問題。控制器的參數(shù)調(diào)整采用模糊調(diào)整規(guī)則,控制器的設(shè)計易于實現(xiàn)且具有很強的適應(yīng)性和
2009-08-06 10:47:2133 針對溫度控制系統(tǒng)的大慣性、大時延等特性,根據(jù)模糊控制理論,設(shè)計出一種模糊自整定PID 控制器,并應(yīng)用于BGA 返修站溫度控制系統(tǒng),實現(xiàn)了PID 參數(shù)的在線自整定。仿真實驗表
2009-08-15 10:35:0625 將模糊控制理論應(yīng)用于凍干試驗機的溫度控制系統(tǒng)中,有助于提高溫度響應(yīng)曲線的跟隨性及加快反應(yīng)時間,從而可以提高溫度的控制精度。通過PID 控制與參數(shù)自適應(yīng)模糊PID 控制
2009-08-15 11:21:4215 通過對壓力試驗機各項指標的深入分析,針對加壓速率控制精度要求高的特點,運用模糊自適應(yīng)PID 參數(shù)的控制技術(shù),克服了傳統(tǒng)定常PID 控制系數(shù)恒定的不足,提高了對水泥塊抗
2009-08-22 11:42:3410 針對普通 PID 在實際工程控制中參數(shù)整定難,抗干擾能力差的問題,設(shè)計了一種基于模糊控制原理的改進型自抗擾控制器。該控制器充分結(jié)合了模糊控制器和自抗擾控制器的各自
2009-08-25 10:26:4311 本文提出了一種基于模糊自適應(yīng)PID 控制的大功率晶閘管電解電源電流控制方案,提高了電解整流系統(tǒng)的穩(wěn)定性和控制精度,降低了直流輸出的紋波。工程實踐表明,該整流系統(tǒng)既
2009-08-28 14:38:1521 針對 EMS 型磁懸浮列車懸浮系統(tǒng)的非線性、遲滯性及模型不確定的特點, 本文采用了模糊自適應(yīng)整定PID 控制技術(shù)來滿足其對動態(tài)和靜態(tài)性能的要求。仿真結(jié)果表明模糊自適應(yīng)整定PID
2009-09-01 16:45:3627 針對溫度控制系統(tǒng)非線性、大滯后、時變性等特征和對溫度控制的要求,采用了自適應(yīng)模糊PID 控制器來實現(xiàn)溫度控制,給出了C8051F020 Soc 單片機控制
2009-09-08 08:50:2339 本文根據(jù)傳統(tǒng)PID 控制技術(shù),結(jié)合模糊控制理論,設(shè)計出模糊PID 控制器,并用它完成對火災(zāi)實驗爐溫度的控制。詳細分析了PID 參數(shù)整定原
2009-09-12 12:04:3415 將模糊控制和PID 控制相結(jié)合,提出了一種智能復(fù)合控制策略,并將其應(yīng)用于交流伺服系統(tǒng)的控制。利用模糊控制在線自適應(yīng)調(diào)整PID 控制器的參數(shù),從而使系統(tǒng)的靜態(tài)和動態(tài)性能
2009-09-12 15:36:4516 本文提出了一種自適應(yīng)模糊控制器用于機械手軌跡跟蹤控制,該控制器通過對訓(xùn)練數(shù)據(jù)的聚類分析提取典型數(shù)據(jù)送入神經(jīng)網(wǎng)絡(luò)學(xué)習,得到的控制規(guī)則更加適用,在線控制時可以自動
2009-09-14 16:00:0729 pH中和過程具有時滯、不確定、非線性特性,采用模糊自適應(yīng)PID控制器能有效解決這一問題。控制器的參數(shù)調(diào)整采用模糊調(diào)整規(guī)則,控制器的設(shè)計易于實現(xiàn)且具有很強的適應(yīng)性和
2009-12-16 15:30:1923 針對單元機組協(xié)調(diào)控制系統(tǒng)的非線性、強耦合性等特點,本文將模糊控制理論應(yīng)用于協(xié)調(diào)控制器設(shè)計中,使用參數(shù)自適應(yīng)模糊PID控制器替代常規(guī)PID控制器。仿真結(jié)果表明該系統(tǒng)的跟
2010-01-11 16:29:0310 基于智能控制思想設(shè)計實現(xiàn)一種高級自適應(yīng)PID 控制器。該控制器由模型辨識單元、控制參數(shù)整定單元和PID 控制單元等部分組成,具有自動選擇控制作用、控制規(guī)律、控制參數(shù)和
2010-01-11 16:36:3722 模糊PID在電阻爐溫度控制系統(tǒng)中的應(yīng)用
針對電阻爐的特點,提出Fuzzy-PID控制算法,介紹了模糊PID控制器原理,并改進了Fuzzy-PID控制器算法。仿真實驗表明該控制
2010-04-28 15:57:1668 針對網(wǎng)絡(luò)控制系統(tǒng)中網(wǎng)絡(luò)時延補償?shù)膯栴},提出了一種模糊自適應(yīng)PID控制器的設(shè)計方法,通過利用在線時延估計方法對時延進行預(yù)估計,根據(jù)估計時延值在線調(diào)節(jié)PID三個參數(shù),從而改善系
2010-07-13 16:05:218 針對溫度控制系統(tǒng)非線性、大滯后、時變性等特征和對溫度控制的要求,采用了自適應(yīng)模糊PID控制器來實現(xiàn)溫度控制,給出了C8051F020 Soc單片機控制實現(xiàn)的具體方案。仿真和實驗結(jié)果
2010-07-14 14:58:1572 參數(shù)自適應(yīng)模糊PID控制器的設(shè)計
溫度控制系統(tǒng)中,采用了非線性的隸屬度函數(shù),以模糊控制為粗調(diào)、PID為細調(diào)。在模糊控制的基礎(chǔ)上,由PI
2009-02-27 09:29:312223 
本書詳細介紹了模糊自適應(yīng)控制理論和主要技術(shù)內(nèi)容,還涉及了模糊集理論,模糊雙曲正切換理論等。
2011-02-16 17:42:4559 在常規(guī)模糊 PID控制器 的基礎(chǔ)上,通過增加模糊控制規(guī)則B ,從而構(gòu)成變積分系數(shù)的模糊PID 控制器,通過在線調(diào)整積分系數(shù),間接調(diào)整常規(guī)模糊控制器的模糊控制規(guī)則,以改善其性能。本文提出
2011-06-17 17:19:4198 結(jié)合變結(jié)構(gòu)控制、自適應(yīng)控制和模糊技術(shù)等特點, 提出一種自適應(yīng)模糊變結(jié)構(gòu)控制方法. 首先, 設(shè)計一個帶積分開關(guān)平面函數(shù)的變結(jié)構(gòu)控制器, 并構(gòu)造一個二維模糊邊界層寬度調(diào)節(jié)器以削
2011-06-20 16:20:2845 針對高爐TRT頂壓控制系統(tǒng)存在的復(fù)雜性,高度非線性,時變不確定性等特點,提出一種模糊自適應(yīng)PID優(yōu)化控制算法,應(yīng)用模糊推理的方法實現(xiàn)對TRT頂壓控制系統(tǒng)中PID參數(shù)的自整定,達到
2012-08-08 11:22:1823 針對太陽光跟蹤伺服系統(tǒng)中應(yīng)用的傳統(tǒng)PID控制過程中的一些問題,本文通過對自適應(yīng)模糊PID控制系統(tǒng)的分析,設(shè)計了雙軸跟蹤伺服系統(tǒng)自適應(yīng)模糊PID控制器,并在Simulink環(huán)境中建立方位
2012-12-17 11:12:0055 在介紹模糊控制基本原理及模糊控制器設(shè)計與分類的基礎(chǔ)上,推導(dǎo)出一種簡化PID型模糊控制器。為了驗證簡化PID型模糊控制器的性能,將其與PD及 PI型模糊控制器進行比較。其仿真結(jié)果最
2013-02-21 15:56:0054 在FPGA平臺上實現(xiàn)了一種溫度模糊控制器,首先對模糊控制系統(tǒng)的思想和工作原理進行了分析,然后使用Quartus ii和modelsim對整個系統(tǒng)進行設(shè)計和仿真,最后在FPGA中實現(xiàn)。結(jié)果表明,該模
2013-03-15 17:06:52104 模糊自適應(yīng)PID控制器設(shè)計,好東西,喜歡的朋友可以下載來學(xué)習。
2016-01-18 15:41:1929 自適應(yīng)PID控制算法及應(yīng)用,有需要的下來看看。
2016-04-01 15:04:4135 變論域自適應(yīng)模糊PID在燃氣輪機發(fā)電系統(tǒng)中的應(yīng)用-2008。
2016-04-01 15:31:3619 基于DSP的異步電機自適應(yīng)模糊PID控制的設(shè)計-2009。
2016-04-05 10:33:0110 基于FPGA的模糊PID控制算法的研究及實現(xiàn)-2009。
2016-04-05 10:39:2920 基于參數(shù)自適應(yīng)模糊PID控制器的掘進機恒功率調(diào)速系統(tǒng)-2008。
2016-04-05 11:07:087 基于自適應(yīng)模糊PID控制的恒壓供氣系統(tǒng)-2008。
2016-04-06 09:50:5117 鋸床電機系統(tǒng)自適應(yīng)模糊PID控制的仿真-2010。
2016-04-06 11:04:5713 模糊自適應(yīng)控制器的設(shè)計及其仿真-2008。
2016-04-06 11:09:1815 鼠籠電機模糊PID控制器的設(shè)計-2009。
2016-04-06 11:49:058 無刷直流電機自適應(yīng)模糊PID控制的研究(1)。
2016-04-06 11:52:4411 無刷直流電機自適應(yīng)模糊PID控制的研究-2008。
2016-04-06 11:54:1428 無軸承電機懸浮子系統(tǒng)的模糊自適應(yīng)PID控制-2009。
2016-04-06 13:58:366 一種自適應(yīng)模糊PID發(fā)電機勵磁電壓調(diào)節(jié)器設(shè)計-2001。
2016-04-06 14:09:0314 直流鍋爐機組參數(shù)自適應(yīng)模糊PID控制-2010。
2016-04-06 14:29:3915 自適應(yīng)模糊PID控制的無刷直流電機及仿真-2003。
2016-04-06 14:37:0836 模糊自適應(yīng)控制理論及其應(yīng)用-北航,下來看看。
2016-04-11 17:23:490 為了提高智能汽車高速行駛下對目標軌跡的跟蹤品質(zhì),借鑒生物免疫反饋的調(diào)節(jié)機理,通過與傳統(tǒng)的PID 控制器類比,設(shè)計了免疫自適應(yīng)PID 控制器。利用模糊推理邏輯,實現(xiàn)對控制器中非線性免疫調(diào)節(jié)作用函數(shù)
2016-06-24 15:51:2913 研究了一種誤差驅(qū)動型自適應(yīng)模糊PID 控制器在二階時滯系統(tǒng)中的應(yīng)用。選擇系統(tǒng)的穩(wěn)態(tài)誤差和誤差變化率為PID 參數(shù)自適應(yīng)模糊調(diào)整的前件變量, 將前件變量模糊化為7 個論域期間, 建立了PID 參數(shù)調(diào)整
2016-07-19 16:55:220 智能控制--自適應(yīng)模糊控制的理論基礎(chǔ)
2016-12-25 21:23:090 自適應(yīng)粒子群優(yōu)化分數(shù)階PID控制器的參數(shù)整定_陳超波
2017-01-03 15:24:458 基于模糊PID控制器的控制方法研究_王述彥
2017-02-08 01:58:380 基于自適應(yīng)模糊免疫PID的軋花自動控制系統(tǒng)_董全成
2017-02-08 01:55:303 自適應(yīng)模糊控制理論的研究綜述_王永富
2017-02-08 01:54:490 基于Simulink下的模糊自適應(yīng)PID在鍋爐汽包水位控制中的應(yīng)用
2017-01-24 16:00:5115 基于模糊自適應(yīng)PID算法的快速充電系統(tǒng)設(shè)計_孫莉莉
2017-01-13 21:36:191 一類自適應(yīng)模糊控制方法研究及在鍋爐汽溫控制中的應(yīng)用_胡一倩
2017-01-28 21:37:150 模糊自適應(yīng)PID控制的研究及應(yīng)用仿真_張涇周
2017-01-31 21:14:564 基于模糊自適應(yīng)PID控制的礦熱爐電極調(diào)節(jié)系統(tǒng)設(shè)計_牛群峰
2017-01-30 23:17:313 ,形成新的更完善更符合要求的控制方式。 而基于模糊數(shù)學(xué)理論的模糊控制是近十幾年來迅速發(fā)展起來的一項高級新型技術(shù),有較強的容錯能力和自適應(yīng)控制能力,將傳統(tǒng)PID控制器和模糊控制技術(shù)相結(jié)合起來,就形成了本文所要研究的模糊PID控制器
2017-11-11 11:46:5424 進行實時調(diào)整,導(dǎo)致液壓整體提升系統(tǒng)在提升過程中會因速度波動而產(chǎn)生提升不平穩(wěn)性。模糊自適應(yīng)PID控制器可以實現(xiàn)控制參數(shù)的實時改變。運用AMESim和Matlab軟件對液壓整體提升系統(tǒng)的模糊控制模型進行聯(lián)合仿真。仿真結(jié)果表明,模糊自適應(yīng)
2017-11-24 10:58:5812 模糊系統(tǒng)建模應(yīng)用-自適應(yīng)模糊控制
2017-12-06 14:57:470 針對具有參數(shù)不確定性特點的高超聲速飛行器輸出跟蹤問題,提出了一種基于分層模糊系統(tǒng)的自適應(yīng)H控制器的設(shè)計方法。為了解決模糊控制器中規(guī)則數(shù)目隨系統(tǒng)變量個數(shù)呈指數(shù)增長的問題,減少在線辨識參數(shù)的數(shù)量,增強
2018-01-02 18:30:150 針對高壓共軌柴油機共軌壓力的精確控制問題,對共軌壓力的控制方法進行了歸納研究,提出了一種基于T-S型自適應(yīng)神經(jīng)模糊推理系統(tǒng)( ANFIS)與PID控制器相結(jié)合的共軌壓力控制算法。在Matlab
2018-03-21 11:23:581 為提高預(yù)應(yīng)力張拉設(shè)備對工程現(xiàn)場的適應(yīng)性與可靠性,設(shè)計了一種基于變頻電機驅(qū)動定量泵的張拉力控制系統(tǒng)。基于該液壓系統(tǒng)建立其數(shù)學(xué)模型,針對該變頻液壓控制系統(tǒng)的非線性與參數(shù)時變性,提出了應(yīng)用自適應(yīng)模糊PID
2018-03-22 15:56:100 。仿真結(jié)果表明,該控制器可設(shè)計成為一個響應(yīng)速度快、靜差小的控制系統(tǒng),與經(jīng)典 PID 控制器在同樣的系統(tǒng)中比較,自適應(yīng)模糊自抗擾控制有較好的控制性能。
2019-06-25 08:00:002 本文借助某款轎車的部分技術(shù)參數(shù),設(shè)計一個基于汽車橫擺角速度的模糊自適應(yīng)PID控制器。首先建立汽車的理想二自由度參考模型,使其能比較真實的反映汽車的動力學(xué)特性。然后結(jié)合PID控制理論,以車輛轉(zhuǎn)向行駛
2019-10-11 16:06:0015 自適應(yīng)模糊PID控制器以e和ec作為輸入,可以滿足e和ec對PID參數(shù)自校正自調(diào)整的要求。從系統(tǒng)的穩(wěn)定性、響應(yīng)速度、超調(diào)量和穩(wěn)態(tài)精度等方面來考慮,kp、ki、kd的作用如下:
2020-04-06 17:29:003733 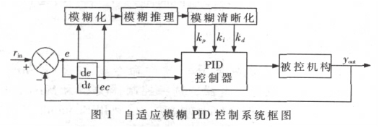
基于自適應(yīng)模糊控制方法的噴桿位姿主動控制器
2021-07-01 16:11:077 2023-11-08 08:32:050
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論