 電子發(fā)燒友App
電子發(fā)燒友App


?
隨著汽車智能化的不斷發(fā)展,智能駕駛以及其所需要的高精度定位技術(shù)也逐漸走進(jìn)大眾的視野。
如果說高精度地圖是為智能汽車的行駛繪制了無形軌道,那高精度定位技術(shù)則是前者的“最佳拍檔“,支持汽車在軌道中安全行駛——高精度位置信息和地圖進(jìn)行匹配后實(shí)現(xiàn)導(dǎo)航功能,與整套感知系統(tǒng)進(jìn)行時(shí)間同步,為智能駕駛提供了最基礎(chǔ)的時(shí)空信息。

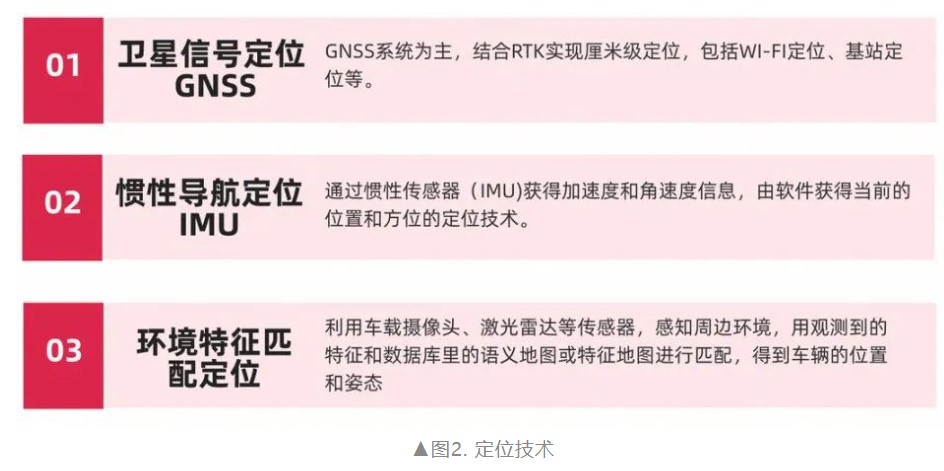
高精度定位技術(shù)根據(jù)使用的硬件不同,可以分為三大類:衛(wèi)星導(dǎo)航(GNSS)、慣性導(dǎo)航(INS/IMU)、環(huán)境特性匹配定位。
●?衛(wèi)星信號定位
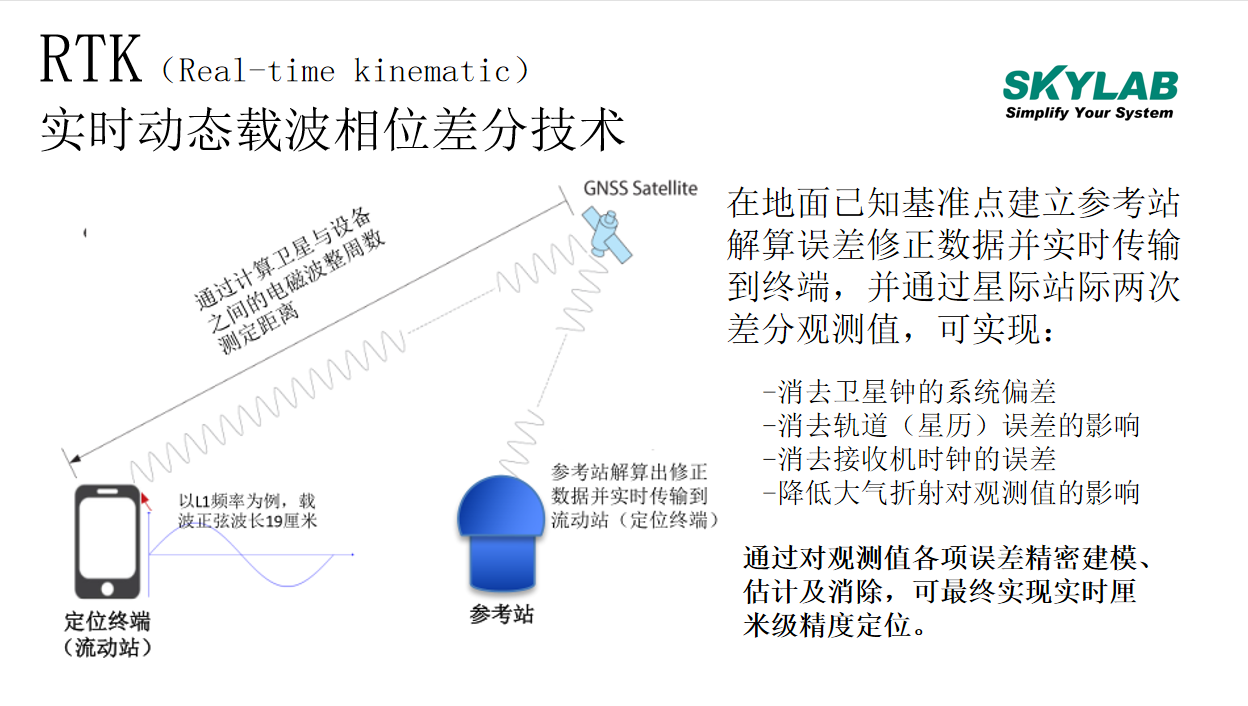
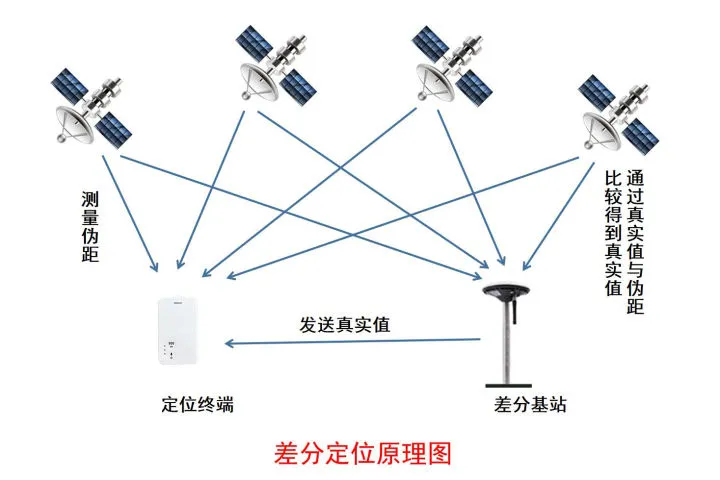
以GNSS系統(tǒng)為主,結(jié)合RTK實(shí)現(xiàn)厘米級定位。
●?慣性導(dǎo)航定位
不依賴任何外部信息,屬于自主導(dǎo)航定位,依靠慣性傳感器(IMU)獲得加速度和角速度信息,并由此推算獲得當(dāng)前位置和方位。最早用于軍工領(lǐng)域。在這里我們對慣導(dǎo)系統(tǒng)再做一個(gè)細(xì)分,主要分為平臺式慣導(dǎo)系統(tǒng)和捷聯(lián)式慣導(dǎo)系統(tǒng)兩大類。捷聯(lián)慣導(dǎo)系統(tǒng)(SINS)是在平臺式慣導(dǎo)系統(tǒng)基礎(chǔ)上發(fā)展而來的,它的結(jié)構(gòu)簡單,具有可靠性高、體積小、重量輕、造價(jià)低的優(yōu)勢,高速大容量的數(shù)字計(jì)算機(jī)技術(shù)和高精度陀螺儀技術(shù)的發(fā)展,因此捷聯(lián)導(dǎo)航系統(tǒng)在低成本、短期中精度導(dǎo)航中呈現(xiàn)出逐漸取代平臺式系統(tǒng)的趨勢。
●?環(huán)境特性匹配定位
利用車載攝像頭、激光雷達(dá)等傳感器,感知周邊環(huán)境,用觀測到的特征和數(shù)據(jù)庫里的特征地圖進(jìn)行匹配,得到車輛的位置和姿態(tài)。
?
而完成智能駕駛的高精度定位,需要這三大類技術(shù)融合來實(shí)現(xiàn),技術(shù)的大趨勢是多元融合、異構(gòu)冗余。對于任何一個(gè)物理量的觀測,都采用多重傳感器取長補(bǔ)短的方式。
隨著認(rèn)知的逐步深入,自動(dòng)輔助駕駛系統(tǒng)開發(fā)中,逐步認(rèn)為衛(wèi)星信號定位和慣性導(dǎo)航定位兩者的結(jié)合(衛(wèi)慣組合),由于兩者信息的互補(bǔ)性,可以更好的發(fā)揮系統(tǒng)的優(yōu)勢。尤其是低成本的捷聯(lián)慣導(dǎo)系統(tǒng)和衛(wèi)星導(dǎo)航系統(tǒng)的組合,一直是國內(nèi)外導(dǎo)航界研究的熱點(diǎn)之一,有望成為未來主要的定位技術(shù)解決方案。
衛(wèi)慣組合優(yōu)點(diǎn)如下:
●?精度高
GNSS和IMU單獨(dú)定位達(dá)到厘米級,IMU可以對車輛輪速,方向盤轉(zhuǎn)角,其他傳感信息結(jié)合,進(jìn)一步提升定位精度。
●?適用場景多
GNSS提供全天候,全天時(shí),絕對位置準(zhǔn)確的定位;汽車進(jìn)入隧道道或地下車庫等衛(wèi)星信號丟失的領(lǐng)域,IMU會根據(jù)失效前感知到的道路信息對汽車航跡進(jìn)行推演,使得車輛保持安全行駛。
●?可靠性提高
IMU可驗(yàn)證GNSS定位的自洽性,對于無法自洽的GNSS數(shù)據(jù)進(jìn)行過濾和修正。
衛(wèi)慣組合有三種耦合方式:松耦合、緊耦合和深耦合。從命名方式上,目前大眾普遍有個(gè)誤解,認(rèn)為這三種方式的耦合程度從低到高,定位精度也是從低到高,今天的文章就揭示一下這幾個(gè)概念的內(nèi)涵,從這幾個(gè)問題開始討論未來發(fā)展趨勢。
Part 1
“X耦合”和“解耦”
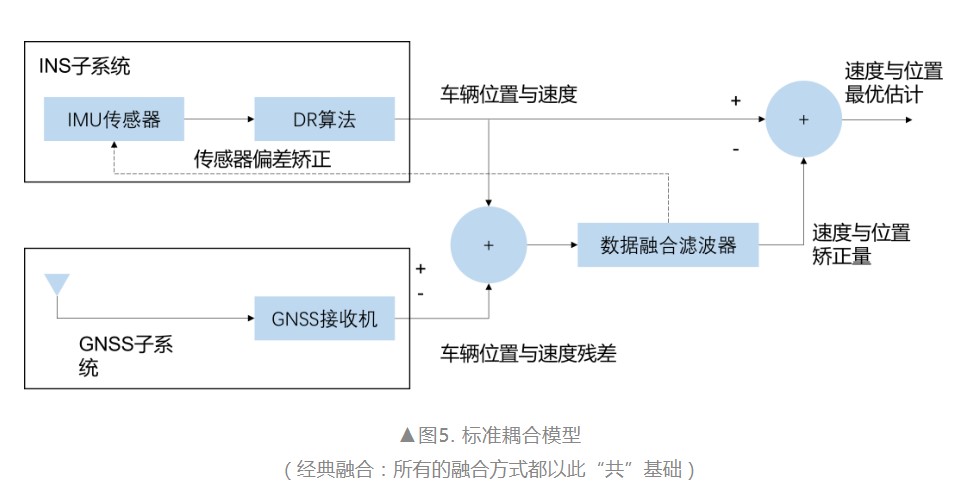
(1)標(biāo)準(zhǔn)耦合模型(松耦合模型) 在這里,我們首先從標(biāo)準(zhǔn)耦合模型(SFM: Standard Fusion Model for GNSS/INS)開始,它是緊/深耦合的技術(shù)基礎(chǔ)和前提。
?
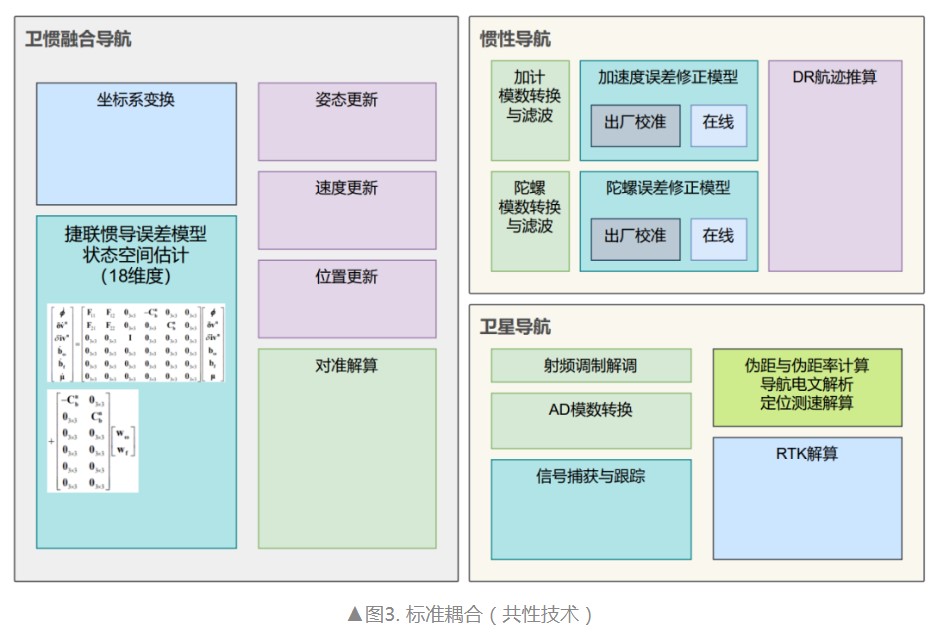
SFM是經(jīng)典衛(wèi)/慣組合系統(tǒng)的數(shù)學(xué)模型,也是所有衍生分支算法的“共性基礎(chǔ)”。其共性占比在整個(gè)衛(wèi)/慣融合技術(shù)領(lǐng)域超過95%。隨著后人在細(xì)分領(lǐng)域的技術(shù)分支開發(fā),為了突出后來的新方法的創(chuàng)新度,標(biāo)準(zhǔn)耦合模型(松耦合)被“貶”稱為:“松耦合模型”。
◎?SFM優(yōu)點(diǎn)主要在于:工程實(shí)現(xiàn)容易,組合系統(tǒng)的計(jì)算量小,可以滿足對實(shí)時(shí)性要求較高的系統(tǒng)設(shè)計(jì);兩個(gè)系統(tǒng)仍然保持獨(dú)立工作,即使某個(gè)系統(tǒng)出 現(xiàn)故障時(shí),組合系統(tǒng)仍然可以繼續(xù)工作,保證 測量的連續(xù)性。
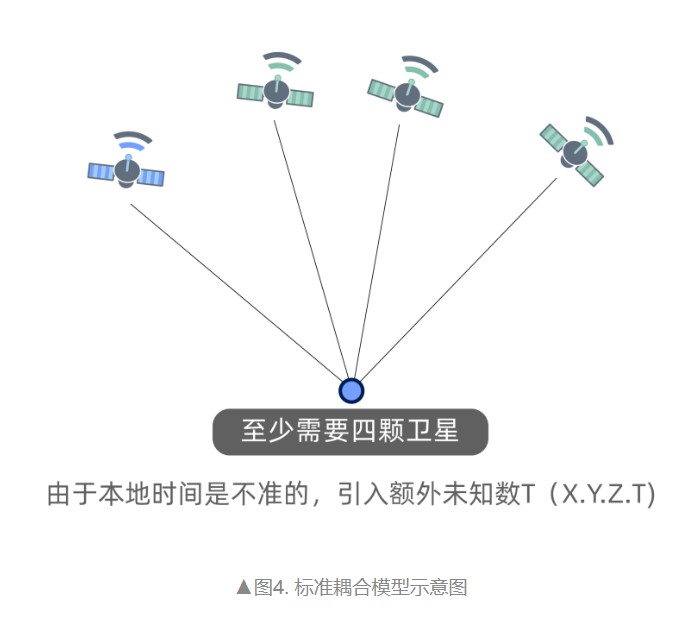
◎?SFM劣勢:由于這種方法要求可見衛(wèi)星數(shù)目不少于 4 顆,此時(shí)組合定位中的GNSS模塊無法定位。
?
在這里GNSS/RTK定位結(jié)果和IMU原始數(shù)據(jù)來實(shí)現(xiàn)融合 ,衛(wèi)慣系統(tǒng)各自解算載體方位和運(yùn)動(dòng)情況信息(衛(wèi)星輸出位置與速度等、慣性輸出位置速度姿態(tài)等),所得結(jié)果導(dǎo)入濾波器進(jìn)行進(jìn)一步結(jié)算,估算INS誤差情況。
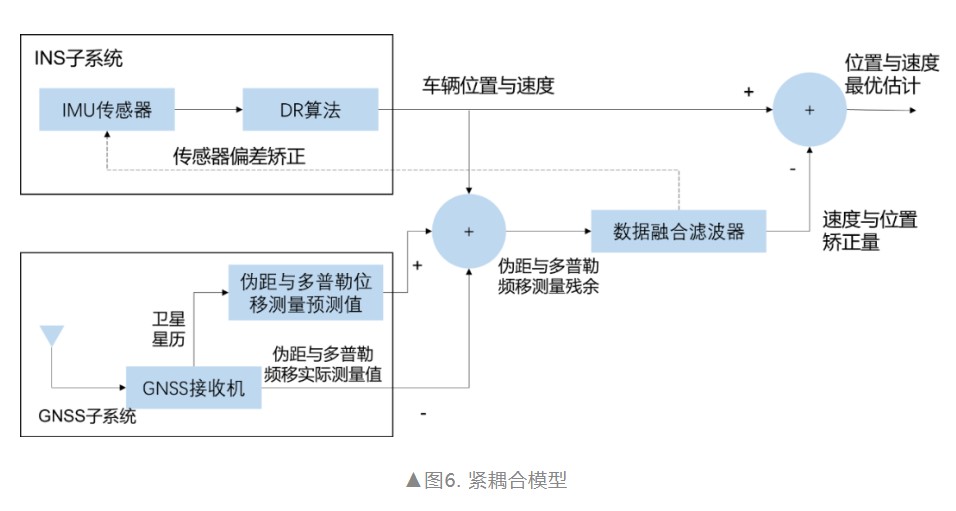
(2) 緊耦合
說完“松耦合”,與之對應(yīng)的就是“緊耦合”。緊耦合導(dǎo)航系統(tǒng)與標(biāo)準(zhǔn)耦合導(dǎo)航系統(tǒng)在功能上來說是基本一致的。
與標(biāo)準(zhǔn)耦合(SFM)導(dǎo)航系統(tǒng)不同的是, GNSS 接收機(jī)輸出的是偽距與多普勒頻移這些原始采樣數(shù)據(jù)。將 GNSS 接收采樣得到的偽距與多普勒頻移 由 INS 系統(tǒng)預(yù)測得到的偽距與多普勒頻移的預(yù)測值相減即可得到偽距與多普勒頻移的測量殘余作為數(shù)據(jù)融 合濾波器的觀測量,將觀測量輸入到數(shù)據(jù)融合濾波器之后,同標(biāo)準(zhǔn)耦合(SFM)系統(tǒng)一樣可以得到INS計(jì)算誤差以及傳感器偏差以完成對INS系統(tǒng)的對準(zhǔn)并獲得位置與速度的最優(yōu)估計(jì)值。
緊耦合最典型的應(yīng)用場景是在軍事環(huán)境,尤其是遇到一定程度電子對抗環(huán)境,衛(wèi)星數(shù)較少(<4顆)的情況;無差分修正(無RTK);同時(shí)是一個(gè)相對高動(dòng)態(tài)環(huán)境:例如巡航速度200米/秒的飛行體(720公里/小時(shí))。
與松耦合技術(shù)相比,緊耦合的優(yōu)勢主要在于:
◎??緊耦合在干擾環(huán)境中工作時(shí)能更好地保持對衛(wèi)星的鎖定,不過除了干擾一信號比以外,這一優(yōu)勢很難定量表示。
◎??在可見衛(wèi)星少于4 顆的情況下,也能在較短的時(shí)間內(nèi)正常工作,同時(shí)定位精度會急劇下降。
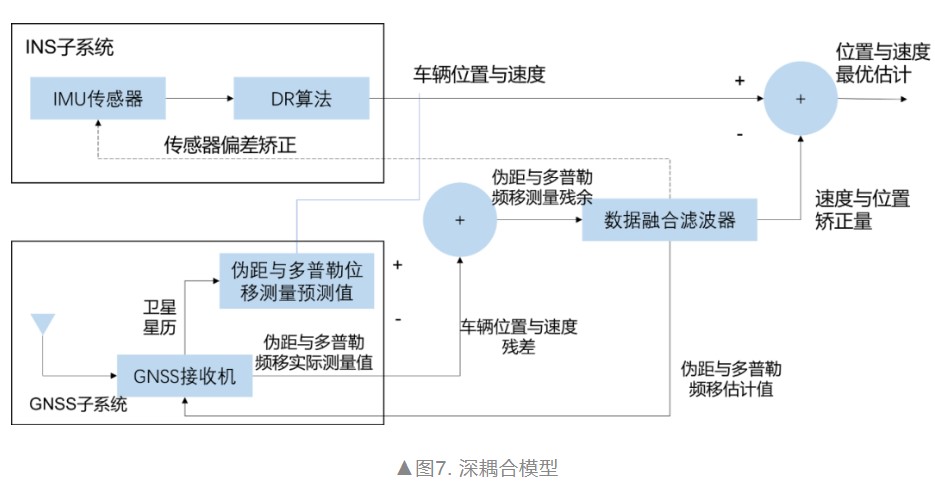
(3)深耦合
深耦合的應(yīng)用是在高動(dòng)態(tài)和射頻干擾環(huán)境下,且無差分修正(無RTK)——此時(shí)無論是 GNSS/INS 標(biāo)準(zhǔn)耦合(SFM)系統(tǒng)還是 GNSS/INS 緊耦合系統(tǒng)都無法正常工作,比如:炮彈、導(dǎo)彈、火箭等非載人裝備。
在這里美國的噴氣推進(jìn)實(shí)驗(yàn)室(JPL)定義“高動(dòng)態(tài)測試環(huán)境”是載體承受持續(xù)1s的高達(dá)70g/s加加速度。或者動(dòng)態(tài)場景為載體承受持續(xù)0.5s的正向加加速度100g/s,間隔2s后,再承受持續(xù)0.5s的反向加加速度100g/s。一般只有彈道導(dǎo)彈的再入大氣層階段才可達(dá)到,對導(dǎo)航精度要求更高的巡航導(dǎo)彈的動(dòng)態(tài)一般低于這兩種測試場景。
而實(shí)際在車輛的應(yīng)用上,一般零百加速達(dá)到4秒左右的時(shí)候,加速度為0.7g;達(dá)到3.8秒時(shí),加速度為0.74g。實(shí)際上深耦合技術(shù)是為了非載人飛行體彌補(bǔ)極限場景下的定位性能不足而產(chǎn)生的。
深耦合導(dǎo)航系統(tǒng)相對于緊耦合導(dǎo)航系統(tǒng)增加了 INS 單元對 GNSS 接收機(jī)的輔助。利用 INS 單元結(jié)合星歷信息可以對偽距與載波的多普勒頻移進(jìn)行估計(jì),利用估計(jì)結(jié)果輔助接收機(jī)的捕獲與跟蹤環(huán)路。事實(shí)上,這種場景主要應(yīng)用在軍事導(dǎo)航上。遠(yuǎn)程精確制導(dǎo)發(fā)射任務(wù)要求快速飛越電離層,對動(dòng)態(tài)范圍要求高達(dá)40g甚至更高,高動(dòng)態(tài)引起的衛(wèi)星與載體之間的多普勒頻移會給GNSS信號跟蹤帶來嚴(yán)重影響。在高動(dòng)態(tài)條件下,高速率帶來的±50~100kHz的多普勒頻移,會導(dǎo)致普通接收機(jī)載波跟蹤環(huán)路失鎖,無法解調(diào)出導(dǎo)航電文;高動(dòng)態(tài)帶來的多普勒頻率大范圍內(nèi)的抖動(dòng),要求加寬環(huán)路帶寬,降低工作信噪比,其代價(jià)降低環(huán)路跟蹤精度;會也使偽隨機(jī)碼產(chǎn)生動(dòng)態(tài)時(shí)延,導(dǎo)致碼環(huán)失鎖。
◎?深耦合模型其優(yōu)勢在于:在高動(dòng)態(tài)條件下,可提升跟蹤環(huán)路的穩(wěn)定性, 提高了接收機(jī)的動(dòng)態(tài)性,進(jìn)而提高了接收機(jī)跟蹤環(huán)路的靈敏度,即使在強(qiáng)射頻干擾環(huán)境下。
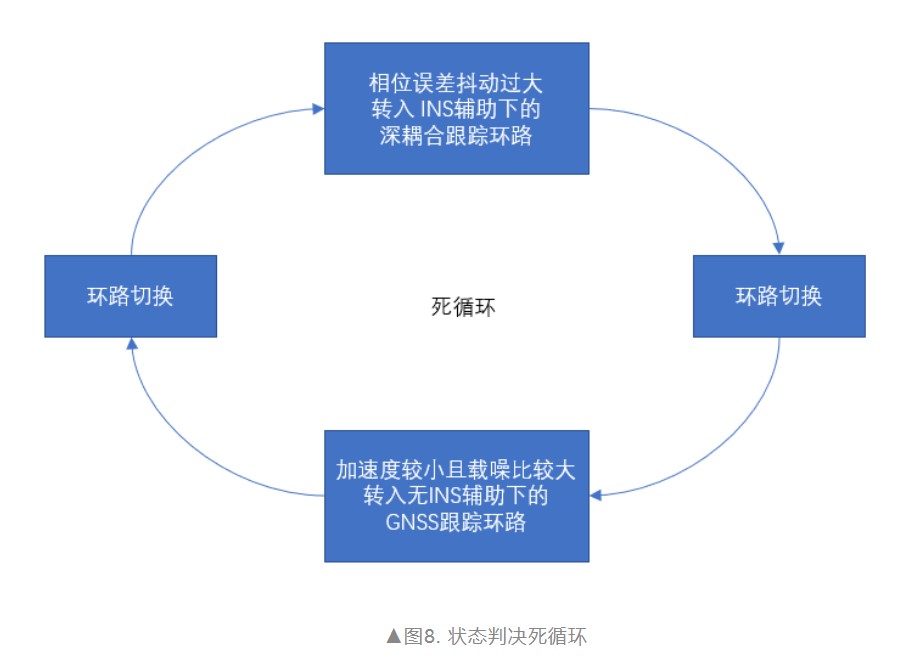
◎?其劣勢在于:由于兩者的之間的耦合很深,因此當(dāng)斷開兩個(gè)系統(tǒng)時(shí),GNSS 接收機(jī)不但無法完成定位、定速的工作,同時(shí)也無法繼續(xù)完成對衛(wèi)星信號的跟蹤,此時(shí)如果沒有相應(yīng)的切換方法來控制,則會導(dǎo)致衛(wèi)星信號的失鎖。且切換設(shè)計(jì)的深耦合跟蹤方法要避免陷入 INS 輔助狀態(tài)切換死循環(huán)的狀態(tài)(防止正反饋)。
但深耦合模型作為高精度定位解決方案,存在一個(gè)問題:由于在軍工和航空航天中,是不太考慮的成本,怎么高大上怎么來;但是在汽車上,由于更大的算力需求,帶來單車成本上升的方案并不可取。特別是在并不是軍工業(yè)的民用領(lǐng)域,這種高要求下沒有成熟的SOC芯片,通常使用 FPGA+DSP方案來作為硬件解決方案。
芯片是需要出貨量支撐的,大家都說深耦合很好,但由于沒有成熟的SOC芯片,目前汽車領(lǐng)域所有公開的硬件方案,都使用FPGA+DSP方案來作為硬件解決方案。
深耦合常用的主要元器件有:
◎?TI DSP 674系列
◎?Intel / Altera FPGA(非車規(guī))
◎?xilinx XA系列(車規(guī)),XA7A12T——此類芯片動(dòng)輒幾百元的書面報(bào)價(jià),加上52周以上貨期,即便不考慮價(jià)格,可能在“供應(yīng)鏈安全”的視角也有待商榷。
在汽車領(lǐng)域大規(guī)模應(yīng)用的前提是系統(tǒng)成熟且成本較低。顯然,在實(shí)際應(yīng)用中,解決方案的優(yōu)劣并不是從標(biāo)準(zhǔn)耦合、緊耦合再到深耦合的遞進(jìn)關(guān)系,而是要看應(yīng)對工況處理的可靠性。
(4)解耦
對于組合導(dǎo)航而言,城市道路中最難處理的“丟星工況”(如嚴(yán)重遮擋、或地下工況),是自動(dòng)駕駛技術(shù)工程實(shí)踐中關(guān)心的重點(diǎn)。此時(shí)的融合算法該如何處理呢?
答案是:慣性推算(Dead Reckoning)。也就是利用IMU獲得載體的高精度的三維加速度與角速度信息,通過積分獲得載體的三維運(yùn)動(dòng)軌跡和姿態(tài)。值得注意的是,在此類工況下,以上所有的衛(wèi)慣融合技術(shù)是沒有差異的,因?yàn)镚NSS系統(tǒng)已經(jīng)無法工作(或因?yàn)榫确浅5投ボ嚨兰壎ㄎ坏目捎眯裕l(wèi)慣系統(tǒng)進(jìn)入了“純慣性推算”的工作模式。此時(shí)的系統(tǒng)精度,100%取決于IMU的精度等級。這也許是《捷聯(lián)慣性導(dǎo)航技術(shù)》的作者David H. Titterton認(rèn)為“不同的融合技術(shù),除了干擾信號比之外,其他優(yōu)勢很難定量表示”的原因。
備注:在衛(wèi)星嚴(yán)重遮擋或完全丟星的工況,衛(wèi)慣之間各種耦合都是無效的。行業(yè)前沿的工程實(shí)踐應(yīng)用策略是盡快解耦,進(jìn)入基于IMU和底盤信息融合的慣性推算模式(DR: Dead Reckoning)。同時(shí),近年來,針對該類工況采用IMU+視覺的VSlam/VIO技術(shù)成為了研究熱點(diǎn),從學(xué)術(shù)文獻(xiàn)的趨勢來看,近十年來國內(nèi)外知名高校(如加拿大卡爾加里大學(xué)等)則向慣性+視覺(或Lidar)+底盤信息融合的技術(shù)路線,展開了大量的探索(如VSlam/VIO技術(shù)等)。更加前沿的研究,敬請期待后續(xù)的分享。
?
Part 2
融合技術(shù)的“新趨勢”
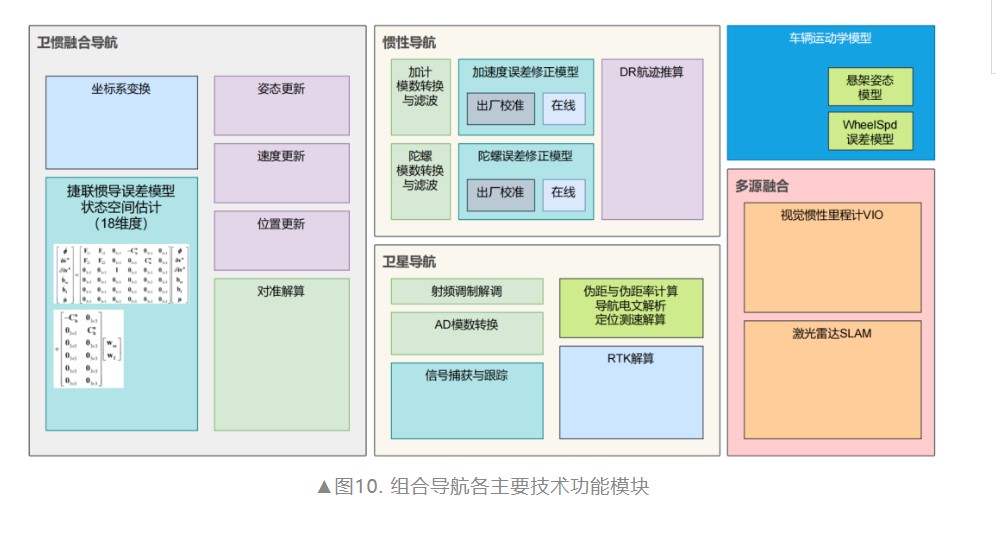
由于自前應(yīng)用廣泛的慣性衛(wèi)星組合導(dǎo)航系統(tǒng)在衛(wèi)星長時(shí)間失鎖的情況下難以保證導(dǎo)航的精度,在不引入其 它傳感器輔助的情況下,利用車輛模型輔助導(dǎo)航成為了車輛導(dǎo)航研究的新方向——主要有:運(yùn)動(dòng)學(xué)動(dòng)力學(xué)模型輔助車輛導(dǎo)航技術(shù)方向和多源融合技術(shù)方向。
從自動(dòng)駕駛“定位”技術(shù)的大范疇來看,隨著傳感器技術(shù)高速發(fā)展、性能幅度提升、成本也以“數(shù)量級” 幅度優(yōu)化,自動(dòng)駕駛技作為人工智能技術(shù)的分支,也和逐漸向主流技術(shù)路線看齊,慢慢擺脫高昂價(jià)格對于技術(shù)路線選用的掣肘。經(jīng)歷了從21世紀(jì)初期到今天,經(jīng)過了三個(gè)階段:
●?第一階段 :實(shí)驗(yàn)室級別多傳感器融合
●?第二階段 :技術(shù)導(dǎo)入量產(chǎn)開始控制成本,采用大量“剪裁”方案
●?第三階段 :技術(shù)爆發(fā)紅利,重啟“可量產(chǎn)”的多傳感器融合技術(shù)路線
小結(jié):緊、深耦合作為“經(jīng)典組合導(dǎo)航”的技術(shù)細(xì)化點(diǎn),針對高動(dòng)態(tài)、非載人場景可以優(yōu)化GNSS系統(tǒng)的衛(wèi)星跟蹤性能,可以使一些“不合格”工況成為可用(達(dá)到60分的水平)。但深耦合所需的硬件方案尚未進(jìn)入規(guī)模化階段,其性能與成本的綜合效益有待進(jìn)一步驗(yàn)證。
目前 針對“車道級”高精度組合導(dǎo)航發(fā)展趨勢,已經(jīng)從經(jīng)典的衛(wèi)/慣組合,向車輛運(yùn)動(dòng)學(xué)模型、多源融合技術(shù)路線發(fā)展。
審核編輯:劉清



















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論