 電子發(fā)燒友App
電子發(fā)燒友App


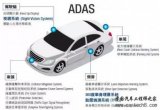
ADAS(Advanced Driver Assistance System),即高級(jí)駕駛員輔助系統(tǒng),是一種在車輛行駛過程中全程幫助駕駛員的主動(dòng)安全輔助系統(tǒng)。ADAS系統(tǒng)設(shè)計(jì)為提高車輛安全,更廣泛的應(yīng)用為提高道路交通安全。ADAS系統(tǒng)采用攝像頭、雷達(dá)等多種傳感器來收集車輛及車輛周圍環(huán)境的物理數(shù)據(jù)。收集相關(guān)數(shù)據(jù)后,ADAS系統(tǒng)將采用目標(biāo)檢測(cè)、識(shí)別與跟蹤等處理技術(shù)來評(píng)估危險(xiǎn)性。ADAS系統(tǒng)方案并不是要控制車輛,而是向駕駛員提供車輛運(yùn)行狀況以及車輛周圍環(huán)境等相關(guān)信息,提醒駕駛員注意潛在危險(xiǎn),從而提高行車安全性。
?高級(jí)駕駛輔助系統(tǒng)能夠增加駕駛的舒適性和安全性
系統(tǒng):車道偏離報(bào)警
傳感器:攝像機(jī)
當(dāng)車輛離開其車道,或者接近道路邊緣時(shí),LDW系統(tǒng)發(fā)出聲音報(bào)警或者動(dòng)作報(bào)警(通過輕微的振動(dòng)方向盤或者座椅來實(shí)現(xiàn))。當(dāng)車輛速度超過一定閾值(例如,大于55英里),車輛沒有打開轉(zhuǎn)向信號(hào)燈時(shí),這些系統(tǒng)會(huì)開始發(fā)揮作用。當(dāng)車輛行駛,其相對(duì)于車道標(biāo)志線的位置表明車輛有可能偏離車道時(shí),需要通過攝像機(jī)系統(tǒng)來觀察車道標(biāo)志。雖然對(duì)于所有車輛制造商而言這些應(yīng)用需求是相似的,但是每一廠商都采用了不同的方法,使用一臺(tái)前視攝像機(jī),一臺(tái)后視攝像機(jī),或者雙路/ 立體前視攝像機(jī)。出于這一原因,很難采用一種硬件體系結(jié)構(gòu)來滿足各種不同類型的攝像機(jī)要求。需要采用靈活的硬件體系結(jié)構(gòu)來提供不同的實(shí)現(xiàn)選擇。
系統(tǒng):自適應(yīng)巡航控制
傳感器:雷達(dá)
過去十年中,豪華汽車采用了ACC技術(shù),這一技術(shù)目前也在更廣泛的市場(chǎng)上得到了應(yīng)用。傳統(tǒng)的巡航控制技術(shù)設(shè)計(jì)用于保持車輛以恒定的車速行駛,與此不同,ACC技術(shù)使車速與交通狀況相適應(yīng),如果與前車距離太近,則會(huì)降速,在路況允許時(shí),會(huì)加速到上限。這些系統(tǒng)通過使用安裝在車輛前部的雷達(dá)來實(shí)現(xiàn)。但是,由于雷達(dá)系統(tǒng)不能識(shí)別某一目標(biāo)的大小和形狀,而且其視場(chǎng)也相對(duì)較窄,因此,應(yīng)用時(shí)要結(jié)合攝像機(jī)。難點(diǎn)在于,目前所使用的攝像機(jī)和雷達(dá)傳感器還沒有標(biāo)準(zhǔn)配置。因此,還是需要靈活的硬件平臺(tái)。
系統(tǒng):交通標(biāo)志識(shí)別
傳感器:攝像機(jī)
正如其名稱所示,交通標(biāo)志識(shí)別(TSR)功能使用前向攝像機(jī)結(jié)合模式識(shí)別軟件,可以識(shí)別常見的交通標(biāo)志(限速、停車、掉頭等)。這一功能會(huì)提醒駕駛員注意前面的交通標(biāo)志,以便駕駛員遵守這些標(biāo)志。TSR功能降低了駕駛員不遵守停車標(biāo)志等交通法規(guī)的可能,避免了違法左轉(zhuǎn)或者無意的其他交通違法行為,從而提高了安全性。這些系統(tǒng)需要靈活的軟件平臺(tái)來增強(qiáng)探測(cè)算法,根據(jù)不同地區(qū)的交通標(biāo)志來進(jìn)行調(diào)整。
系統(tǒng):夜視
傳感器:IR或者熱成像攝像機(jī)
夜視(NV)系統(tǒng)幫助駕駛員在很暗的條件下識(shí)別物體。這些物體一般超出了車輛大燈的視場(chǎng)范圍,因此,NV系統(tǒng)針對(duì)在前方道路上行駛的車輛提前發(fā)出報(bào)警,幫助駕駛員避免撞車事件的發(fā)生。
NV系統(tǒng)使用各種攝像機(jī)傳感器和顯示器,具體與生產(chǎn)商有關(guān),但一般都屬于兩種基本類型:主動(dòng)式和被動(dòng)式。
●主動(dòng)系統(tǒng),也稱為近IR系統(tǒng),帶電耦合器件(CCD)攝像機(jī)和IR燈源相結(jié)合,在顯示器上呈現(xiàn)黑白圖像。這些系統(tǒng)的分辨率很高,圖像質(zhì)量也非常好。其典型的可視范圍是150米。這些系統(tǒng)能夠看清楚攝像機(jī)視場(chǎng)范圍內(nèi)的所有物體(包括沒有熱輻射的物體),但是,在雨雪環(huán)境下,效率要大打折扣。
●被動(dòng)系統(tǒng)不使用外部光源,而是依靠熱成像攝像機(jī),利用物體自然熱輻射來采集圖像。這些系統(tǒng)不會(huì)受到對(duì)面來車大燈的影響,也不會(huì)受到惡劣天氣狀況的影響,其探測(cè)范圍達(dá)到300米至1000米。這些系統(tǒng)的缺點(diǎn)在于圖像是顆粒狀的,功能受限于較溫暖的氣候狀況。而且,被動(dòng)式系統(tǒng)只能探測(cè)有熱輻射的物體。被動(dòng)式系統(tǒng)結(jié)合視頻分析技術(shù),可以清楚的顯示車輛前方道路上的物體,例如,行人等。
在NV系統(tǒng)中,有多種體系結(jié)構(gòu)選擇,每一種方法都有其優(yōu)缺點(diǎn)。為提高競(jìng)爭(zhēng)力,汽車生產(chǎn)商應(yīng)支持多種攝像機(jī)傳感器,在通用、靈活的硬件平臺(tái)上實(shí)現(xiàn)這些傳感器。
系統(tǒng):自適應(yīng)遠(yuǎn)光控制
傳感器:攝像機(jī)
自適應(yīng)遠(yuǎn)光控制(AHBC)是一種智能大燈控制系統(tǒng),使用了攝像機(jī)來探測(cè)交通狀況(對(duì)面來車以及同向交通狀況),根據(jù)這些狀況,調(diào)亮或者調(diào)暗遠(yuǎn)光燈。 AHBC系統(tǒng)支持駕駛員盡可能在最大照亮距離上使用遠(yuǎn)光,而不必在其他車輛出現(xiàn)時(shí)手動(dòng)調(diào)暗大燈,不會(huì)分散駕駛員注意力,從而提高了車輛的安全性。在某些系統(tǒng)中,甚至可以分別控制大燈,調(diào)暗一個(gè)大燈,而同時(shí)另一個(gè)大燈正常點(diǎn)亮。AHBC與LDW和TSR等前視攝像機(jī)系統(tǒng)是相輔相成的。這些系統(tǒng)不需要高分辨率攝像機(jī),某一款車輛如果已經(jīng)在ADAS應(yīng)用中采用了前視攝像機(jī),那么這一特性的性價(jià)比會(huì)非常高。
系統(tǒng):行人/障礙物/車輛探測(cè)(PD)
傳感器:攝像機(jī)、雷達(dá)、IR
行人(以及障礙物和車輛)探測(cè)(PD)系統(tǒng)完全依靠攝像機(jī)傳感器來深入感知周圍環(huán)境,例如,采用一臺(tái)攝像機(jī),或者在更復(fù)雜的系統(tǒng)中采用立體攝像機(jī)。“類別變量”(衣著、燈光、大小和距離)的差異會(huì)很大,背景復(fù)雜而且不斷變化,以及傳感器置于移動(dòng)平臺(tái)(車輛)上等因素,導(dǎo)致很難確定移動(dòng)中行人的視覺特征,因此,采用IR傳感器能夠增強(qiáng)PD系統(tǒng)。雷達(dá)也可以增強(qiáng)車輛探測(cè)系統(tǒng),它提供很好的距離測(cè)量功能,在惡劣的天氣條件下,性能表現(xiàn)出眾,能夠測(cè)量車輛的行駛速度。這一復(fù)雜的系統(tǒng)需要使用同時(shí)來自多個(gè)傳感器的數(shù)據(jù)。(后面會(huì)詳細(xì)討論這一被稱為傳感器融合的過程。)
系統(tǒng):駕駛員困倦報(bào)警
傳感器:車內(nèi)IR攝像機(jī)
困倦報(bào)警系統(tǒng)監(jiān)視駕駛員的面部,測(cè)量其頭部位置、眼睛(張開/閉上)以及其他類似的報(bào)警指示。如果確定駕駛員有進(jìn)入睡眠的跡象,或者看起來意識(shí)不清,該系統(tǒng)會(huì)發(fā)出報(bào)警。有些系統(tǒng)還監(jiān)視心率和呼吸。設(shè)想但是還沒有實(shí)現(xiàn)的功能包括使車輛靠近路邊行駛,最終靠邊停下來。
需求:靈活的高性能技術(shù)平臺(tái)
雖然很難詳細(xì)預(yù)測(cè)這些功能的未來發(fā)展,以后會(huì)應(yīng)用到什么程度,但是,從技術(shù)角度看,有幾點(diǎn)是明確的:
●沒有一種單一的體系結(jié)構(gòu)能夠滿足新出現(xiàn)的各類應(yīng)用需求。
●需要采用靈活的平臺(tái)適應(yīng)市場(chǎng)發(fā)展趨勢(shì),實(shí)現(xiàn)最新的功能,同時(shí)滿足成本、規(guī)劃和性能目標(biāo)。
●要滿足ADAS應(yīng)用的高性能需求,應(yīng)在軟件和硬件上達(dá)到均衡。
●系統(tǒng)使用多個(gè)不同類型的傳感器來完成安全相關(guān)任務(wù),這類系統(tǒng)今后的發(fā)展會(huì)比較強(qiáng)勁。
信號(hào)融合
需要特別注意的是,大部分ADAS應(yīng)用需要對(duì)來自多個(gè)傳感器的多路信號(hào)進(jìn)行處理和分析,包括,視頻攝像機(jī)、雷達(dá)、紅外傳感器,以及今后可能出現(xiàn)的激光等其他傳感器信號(hào)。例如,危險(xiǎn)探測(cè)不僅僅需要對(duì)來自多個(gè)攝像機(jī)的數(shù)據(jù)流進(jìn)行集成和分析,而且,如果要用在全天候各種天氣條件下,還必須采用雷達(dá)數(shù)據(jù)。傳感器融合這一術(shù)語用于描述ADAS應(yīng)用中不同信號(hào)的集成。
處理信號(hào)融合這一難題的一種算法解決方案是Kalman濾波,它集合了很多種算法。這是說明ADAS任務(wù)有多復(fù)雜的一個(gè)很好的例子。例如,Kalman濾波能夠集成視頻和雷達(dá)輸入信號(hào),使用這些數(shù)據(jù)來生成當(dāng)前環(huán)境的快照。然后,它在這些快照上應(yīng)用名為“航位推測(cè)”的過程,根據(jù)物理?xiàng)l件,計(jì)算周圍環(huán)境“可能”會(huì)出現(xiàn)什么狀況。例如,它估算周圍車輛的新位置,確定路邊的樹木沒有移動(dòng)等。然后,Kalman濾波功能對(duì)比這兩類快照,在可信度基礎(chǔ)上,估算出應(yīng)采取哪些措施。例如,如果汽車使用了ACC,車頭距離太近,那么,可以減速,或者剎車。
??? ADAS應(yīng)用曾涉及到很多發(fā)展方向,并不能明確哪一方向最終會(huì)推動(dòng)市場(chǎng)發(fā)展。近年來不少名廠廠紛紛推出其解決方案,下面我們將通過這些設(shè)計(jì)方案來認(rèn)識(shí)一下ADAS技術(shù)和應(yīng)用趨勢(shì)。
全面解析高級(jí)駕駛輔助系統(tǒng)ADAS
司機(jī)、車輛和系統(tǒng)相互之間的影響是目前高級(jí)駕駛輔助系統(tǒng)(ADAS)面臨的挑戰(zhàn)。西門子Siemens VDO汽車公司通過應(yīng)用pro.pilot駕駛導(dǎo)向系統(tǒng)來迎接這一挑戰(zhàn)。
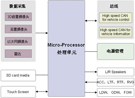
司機(jī)在駕駛過程中會(huì)面臨非常復(fù)雜的交通狀況。首先,司機(jī)需要對(duì)汽車進(jìn)行動(dòng)力控制。其次,他們還要保持對(duì)汽車四周環(huán)境的關(guān)注。第三,司機(jī)還要規(guī)定從出發(fā)點(diǎn) 到目的地的導(dǎo)航線路。除此之外,司機(jī)還可能會(huì)同時(shí)使用車載信息娛樂系統(tǒng)或者與乘客聊天。輔助駕駛系統(tǒng)能幫助司機(jī)監(jiān)測(cè)和處理穩(wěn)定性、控制和導(dǎo)航三個(gè)層面(如 圖2 所示)的信息,這將能有效減少司機(jī)的工作負(fù)擔(dān),并且進(jìn)步了操控的方便性和駕駛的安全性。防抱死制動(dòng)系統(tǒng)和汽車穩(wěn)定控制系統(tǒng)已經(jīng)能夠完成汽車穩(wěn)定性層面上的 任務(wù)。導(dǎo)航系統(tǒng)能夠滿足導(dǎo)航層面的需要,而且應(yīng)用越來越廣泛。在汽車的直接環(huán)境中,司機(jī)需要引導(dǎo)車輛保持在車道內(nèi)行駛。例如,司機(jī)需要監(jiān)測(cè)其他車道的情 況,又如行人、車輛和騎自行車的人,同時(shí)還要留意交通訊號(hào)和車道標(biāo)志線,并做出相應(yīng)的反應(yīng)。
圖1 高級(jí)駕駛輔助系統(tǒng)能夠增加駕駛的舒適性和安全性
高級(jí)駕駛輔助系統(tǒng)
目前,司機(jī)還是主要依靠自己的感官刺激來進(jìn)行判定。在過往的幾年中,由于汽車數(shù)目的增加,道路的交通情況變得越來越復(fù)雜,這使得司機(jī)需要具備傳感器、控 制器和制動(dòng)器那樣的能力。高級(jí)駕駛輔助系統(tǒng)利用多種傳感技術(shù)來感應(yīng)四周的環(huán)境,并智能地匯集了全球以及內(nèi)部數(shù)據(jù),系統(tǒng)能夠有效增加汽車駕駛的舒適性和安全 性,實(shí)現(xiàn)了對(duì)司機(jī)駕駛控制的支持。這將能明顯減少交通事故的數(shù)目,這正是象美國(guó)高速公路安全協(xié)會(huì)(NHTSA)和歐盟這樣的美國(guó)和國(guó)際協(xié)會(huì)所希看看到的。

圖2 數(shù)據(jù)支持和信息輔助系統(tǒng)
pro.pilot網(wǎng)絡(luò)
為了從高級(jí)駕駛輔助系統(tǒng)中獲得最大的利益,并且實(shí)現(xiàn)“零事故”的目標(biāo),西門子VDO汽車公司開發(fā)的pro.pilot是以司機(jī)為中心的。除了增加安全性 和舒適性以外,pro.pilot還能為司機(jī)提供更多的方向選擇和目前整體的交通狀況,使司機(jī)選擇更經(jīng)濟(jì)的駕駛方案。這樣,pro.pilot能夠在緊急 情況下幫助司機(jī),但確又不會(huì)減少駕駛樂趣。但是司機(jī)仍然要對(duì)汽車負(fù)所有的責(zé)任。環(huán)境感應(yīng)和傳感器技術(shù)的性能只是高級(jí)輔助駕駛系統(tǒng)成功的一方面。除了象傳感 器和制動(dòng)器這樣的電子機(jī)械部件,pro.pilot還包括車輛一體化、應(yīng)用程序和驅(qū)動(dòng)接口,如圖3所示。
圖3 pro.pilot的組成
車輛一體化包括機(jī)械和電子兩方面因素,比如像傳感器和制動(dòng)器需要集成到汽車的結(jié)構(gòu)和電子體系中往。由于傳感器一般被安裝在車輛表面四周,所以在設(shè)計(jì)和封 裝上有很多限制。驅(qū)動(dòng)反饋顯示屏的設(shè)計(jì)和安裝位置受到整個(gè)汽車內(nèi)飾設(shè)計(jì)的影響。增加元件和控制器會(huì)影響汽車整體的電子體系,比如ECU的數(shù)目、內(nèi)部的連 接、總線的帶寬、延遲時(shí)間等。
應(yīng)用程序包括運(yùn)算法則和軟件,可以處理和分析傳感器獲得的數(shù)據(jù),以獲得汽車四周環(huán)境的示意圖并對(duì)交通狀況 進(jìn)行分類。通過對(duì)目標(biāo)物體的探測(cè),司機(jī)可以及時(shí)地獲得通知或警示,終極對(duì)汽車的動(dòng)力性進(jìn)行干預(yù)。人機(jī)界面(HMI)可以包括視覺、聽覺或者觸覺反饋。司機(jī) 與系統(tǒng)之間的交流會(huì)影響整個(gè)系統(tǒng)的性能,包括對(duì)司機(jī)和車輛的影響,因此決定了高級(jí)輔助駕駛系統(tǒng)能否減少事故的發(fā)生。
考慮到上述所有的因素,才有可能具體說明輔助駕駛系統(tǒng)的概念,并采用恰當(dāng)?shù)姆桨负驮韺?shí)現(xiàn)完美的高性能系統(tǒng)。
ADAS的傳感器
高級(jí)輔助駕駛系統(tǒng)基于不同的傳感器技術(shù),如圖4所示。77GHz的雷達(dá)傳感器目前已經(jīng)在高端奢華轎車上的主動(dòng)式巡航控制系統(tǒng)(ACC)上應(yīng)用多年了。該 系統(tǒng)的傳感器可以丈量前方車輛的速度以及兩車之間的間隔,同時(shí)可以監(jiān)測(cè)自身車輛的速度和間隔。目前已經(jīng)在中級(jí)轎車和經(jīng)濟(jì)型轎車市場(chǎng)上開始應(yīng)用的機(jī)載激光雷 達(dá)(Lidar)傳感器是遠(yuǎn)程傳感器中比較經(jīng)濟(jì)的選擇。相比于雷達(dá),這種傳感器發(fā)射激光脈沖,并能檢測(cè)從其他物體反射回來的光線。與其他物體之間的間隔可 以通過信號(hào)延遲的時(shí)間來進(jìn)行計(jì)算。

圖4 重要的傳感器
短程雷達(dá)傳感器的工作頻率是24GHz,用于監(jiān)測(cè)車輛四周的物體。這種傳感器一般安裝在車輛的側(cè)面,其信息用于盲點(diǎn)檢測(cè)(BSD)和并線輔助(LCA) 功能,比如在盲點(diǎn)中出現(xiàn)物體或者鄰近車道車輛進(jìn)進(jìn)盲點(diǎn)時(shí),會(huì)向司機(jī)提出預(yù)警。下一步,其信息能夠與導(dǎo)航系統(tǒng)相結(jié)合,更好地實(shí)現(xiàn)車輛引導(dǎo)。安裝在車輛前方或 后方的24GHz雷達(dá)傳感器可以用于預(yù)防碰撞發(fā)生。
視頻傳感器能夠監(jiān)測(cè)圖像信息,比如側(cè)面物體的大小和外形。視頻傳感器能夠監(jiān)測(cè)其他的道路使用者、交通訊號(hào)和路標(biāo)等情況。傳感器發(fā)出的信息能夠?qū)崿F(xiàn)車道偏離警告和交通訊號(hào)識(shí)別功能。
其他基礎(chǔ)設(shè)施如交通訊號(hào)、轉(zhuǎn)彎或山坡等信息可以通過輿圖來獲得。超聲波傳感器用于低速情況,比如停車,同時(shí)不需要高探測(cè)范圍。而且內(nèi)部數(shù)據(jù)可以收集起來提供給其他車輛。通過車對(duì)車通訊進(jìn)行數(shù)據(jù)傳遞,來監(jiān)測(cè)車流密度。
另外,通過不同傳感器獲得的數(shù)據(jù)可以相互融合,用于增加系統(tǒng)功能或增強(qiáng)現(xiàn)有的功能。比如,雷達(dá)、攝像機(jī)和機(jī)載激光雷達(dá)與導(dǎo)航數(shù)據(jù)的融合對(duì)改善車輛性能十 分重要。通過將從攝像機(jī)和輿圖的信息進(jìn)行結(jié)合,就能進(jìn)步交通訊號(hào)識(shí)別系統(tǒng)的識(shí)別率。探測(cè)到的交通訊號(hào)再與eHorizon的數(shù)據(jù)進(jìn)行對(duì) 比,eHorizon能夠通過提供基于導(dǎo)航數(shù)據(jù)的道路基礎(chǔ)設(shè)施具體信息來支持ADAS的功能。計(jì)算置信水平就能決定向司機(jī)顯示哪種交通訊號(hào)。融合這些傳感 器還能獲得一種新的功能,即Sensitive Guidance,這是融合了雷達(dá)或攝像機(jī)系統(tǒng)的導(dǎo)航系統(tǒng)。導(dǎo)航系統(tǒng)的輸出與交通情況、雷達(dá)或攝像機(jī)傳感器相適應(yīng),比如監(jiān)測(cè)盲點(diǎn)中或其他車道中的車輛。

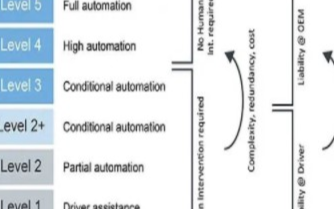
圖5 主動(dòng)和被動(dòng)安全:未來的發(fā)展趨勢(shì)
無論是正常駕駛或在危險(xiǎn)環(huán)境中駕駛,目前市場(chǎng)上多數(shù)駕駛輔助系統(tǒng)都是通過提供附加信息來幫助司機(jī)的,如圖5所示。在上述兩種情況中,系統(tǒng)都能夠幫助減少碰撞事故的發(fā)生。高級(jí)駕駛輔助系統(tǒng)未來有兩種發(fā)展趨勢(shì):
趨勢(shì)1:從預(yù)警系統(tǒng)到干預(yù)系統(tǒng)都發(fā)生了一些變化。ADAS目前主要職責(zé)是在危急情況下提醒司機(jī),比如盲點(diǎn)檢測(cè)系統(tǒng)。系統(tǒng)未來將會(huì)向干預(yù)系統(tǒng)發(fā)展,即在限定的情況下對(duì)汽車進(jìn)行控制。比如攝像系統(tǒng)將會(huì)從車道偏離預(yù)警系統(tǒng)向車道控制系統(tǒng)發(fā)展。
趨勢(shì)2:將主動(dòng)安全與被動(dòng)安全系統(tǒng)結(jié)合起來。目前,碰撞中的被動(dòng)安全系統(tǒng)與主動(dòng)安全ADAS是相互獨(dú)立的,比如安全氣囊和預(yù)縮式安全帶。它們之間沒有相 互的聯(lián)系,比如在機(jī)載激光雷達(dá)、雷達(dá)或視頻傳感器監(jiān)測(cè)到不可避免的碰撞時(shí)就讓安全氣囊做好預(yù)備。目前機(jī)載激光雷達(dá)傳感器用于主動(dòng)式巡航控制系統(tǒng),能夠在正 常駕駛狀態(tài)下為司機(jī)提供支持。未來,這些傳感器將會(huì)與短程雷達(dá)(24GHz)和攝像機(jī)相結(jié)合,以便為安全氣囊和預(yù)縮式安全帶提供相應(yīng)的預(yù)備信息。
完整的預(yù)防碰撞系統(tǒng)
這些發(fā)展趨勢(shì)將會(huì)使預(yù)防碰撞系統(tǒng)更加完整,系統(tǒng)通過利用多種傳感器技術(shù)監(jiān)控車輛四周的環(huán)境,能夠預(yù)先檢測(cè)到不可避免的碰撞事故。在預(yù)防碰撞情況下,系統(tǒng) 會(huì)干預(yù)車輛的動(dòng)態(tài)性能(如制動(dòng))并預(yù)先觸發(fā)被動(dòng)安全系統(tǒng)。這種發(fā)展趨勢(shì)意味著,車輛中的制動(dòng)器、控制器和傳感器的一體化。開發(fā)和實(shí)現(xiàn)這種ADAS系統(tǒng)還需 要考慮到下列因素:協(xié)同、融合、結(jié)構(gòu)和系統(tǒng)。
假如一個(gè)傳感器只能實(shí)現(xiàn)一個(gè)功能,那就難以獲得本錢更為優(yōu)化的解決方案。比如攝像性能夠提 供復(fù)合功能的數(shù)據(jù),如監(jiān)測(cè)路標(biāo)、交通訊號(hào)和其他道路的使用者等。協(xié)同功能答應(yīng)系統(tǒng)通過增加部分軟件來方便地實(shí)現(xiàn)功能的增加。假如復(fù)合傳感器應(yīng)用到一輛汽車 上,這些傳感器提供的數(shù)據(jù)就能夠進(jìn)行相互融合。這將使針對(duì)目標(biāo)的信息更加豐富,使得探測(cè)的結(jié)果更加可信。在預(yù)防碰撞系統(tǒng)中,這種探測(cè)可靠性的增加使得系統(tǒng) 干預(yù)和預(yù)警更加輕易和有效。在車輛中使用復(fù)合傳感器對(duì)車輛的結(jié)構(gòu)產(chǎn)生了重大的影響,比如增加了電子控制單元ECU性能。因此,車輛應(yīng)被視為一個(gè)完整的系 統(tǒng),是相互影響的各種元件的集合。
為了實(shí)現(xiàn)這些發(fā)展趨勢(shì),西門子VDO汽車公司參與了很多國(guó)際和國(guó)內(nèi)的合作項(xiàng)目。目的是通過組合完整系統(tǒng)的方法來保證交通安全。安全系統(tǒng)將支持司機(jī)在各種交通情況中駕駛,從正常駕駛到潛伏的不可避免的碰撞。安全系統(tǒng)包括交通情況分類、風(fēng)險(xiǎn)評(píng)估和行動(dòng)觀念。
總結(jié)
在過往的幾年中,高級(jí)輔助駕駛系統(tǒng)的市場(chǎng)已經(jīng)開始蓬勃發(fā)展。目前,以舒適性為導(dǎo)向的系統(tǒng)(如ACC)主要應(yīng)用在中級(jí)或豪華轎車上。未來,這些系統(tǒng)將會(huì)被涵蓋到安全系統(tǒng)當(dāng)中,并且在經(jīng)濟(jì)型轎車中得以應(yīng)用。
但是,高級(jí)輔助駕駛系統(tǒng)的發(fā)展不應(yīng)該僅僅被視為一個(gè)技術(shù)題目,其中包括很多與司機(jī)之間的影響,以及和車輛結(jié)構(gòu)之間的影響關(guān)系。這就使得系統(tǒng)需求的方法是非常復(fù)雜和重要的。西門子VDO汽車公司通過pro.pilot網(wǎng)絡(luò)將自己視為一個(gè)系統(tǒng)集成者,更有效地來迎接挑戰(zhàn)。
ADI 高級(jí)駕駛員輔助系統(tǒng)(ADAS)視覺解決方案
應(yīng)用概述
高級(jí)駕駛員輔助系統(tǒng)(ADAS)在未來幾年將出現(xiàn)大幅增長(zhǎng)。主要原因之 一是安全意識(shí)的增強(qiáng),以及客戶對(duì)駕乘舒適度要求的提高。但是, 最重要的原因是,歐洲新車安全評(píng)鑒協(xié)會(huì)(NCAP)加強(qiáng)了安全要求,這將促使明年ADAS設(shè)備安裝率從個(gè)位數(shù)上升到幾乎100%。因此,可商 業(yè)化運(yùn)行的解決方案無疑已是當(dāng)務(wù)之急。
基于視覺的ADAS可以從多方面大大提高行車安全性。通過安裝后視/前視/側(cè)視攝像頭和視覺處理 ECU,可以實(shí)現(xiàn)多種功能來幫助駕駛員 提前防范風(fēng)險(xiǎn)。受歡迎的應(yīng)用包括路線偏差告警(LDW)、遠(yuǎn)光近光調(diào)整(HB/LB)、交通信號(hào)識(shí)別(TSR)、停車輔助、后視/環(huán)視、防撞等。
方案特點(diǎn)
為了實(shí)現(xiàn)這一功耗,ADI公司采用了直接又特別的概念。這一概念基于兩個(gè)Blackfin內(nèi)核,因?yàn)橐蚜慨a(chǎn)的ADAS系統(tǒng)正采用這一架構(gòu)。然而,那些無 法經(jīng)濟(jì)高效通過軟件模型化的算法已經(jīng)被用硬件引擎實(shí)現(xiàn),由此產(chǎn)生了高度可配置的視覺處理單元工具箱。ADI公司將其稱作“流水線視覺處理器”(PVP), 如今已成為全新ADSP-BF60x處理器的一部分。雖然采用了低功耗處理技術(shù),但還需要進(jìn)一步創(chuàng)新,以解決現(xiàn)代設(shè)計(jì)中最重要的功耗問題,這種方法是外部 存儲(chǔ)器(DDR2)接口。通過適當(dāng)分配處理能力,合理利用適量存儲(chǔ)器帶寬,可以實(shí)現(xiàn)最低功耗。此外,一些硬件模塊也增強(qiáng)了 Blackfin架構(gòu),使其能夠滿足功能安全要求。
系統(tǒng)要求和設(shè)計(jì)挑戰(zhàn)
? 支持ISO26262要求的功能安全
? 能夠在面向應(yīng)用的開發(fā)環(huán)境中使用
? 優(yōu)化了視覺處理庫(kù)
? 有助于設(shè)計(jì)出一套上市時(shí)間短、風(fēng)險(xiǎn)低的總體系統(tǒng)
主信號(hào)鏈
1.ADAS攝像頭—智能攝像頭ECU

2.ADAS ECU—攝像頭+ 中央處理ECU

相關(guān)參考器件
1.DSP
雙核ADSP-BF606 Blackfin處理器針對(duì)各種工業(yè)、儀器儀表、醫(yī)療及消費(fèi)電子應(yīng)用進(jìn)行了優(yōu)化,這些應(yīng)用需要完成復(fù)雜的控制和信號(hào)處理任務(wù),同時(shí)保持極高的數(shù)據(jù)吞吐量。 具體特性包括高性能增強(qiáng)型基礎(chǔ)設(shè)施、大型片內(nèi)存儲(chǔ)器和功能豐富的外設(shè)集,具有擴(kuò)展連接選項(xiàng),包括USB 2.0 HS OTG、2個(gè)10/100以太網(wǎng)MAC,以及移動(dòng)存儲(chǔ)器接口(RSI)。此外,ADSP-BF606處理器還具有適合安全至關(guān)重要應(yīng)用的特性,包括內(nèi)部存 儲(chǔ)器塊中用于存儲(chǔ)器保護(hù)、奇偶校驗(yàn)和ECC保護(hù)的CRC,以及故障管理單元。
ADSP-BF606 Blackfin處理器功能框圖
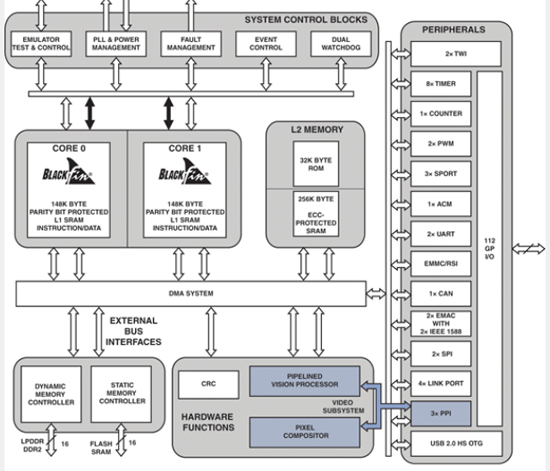
詳細(xì)資料:ADSP-BF606 BLACKFIN雙核處理器,適合高性能數(shù)字信號(hào)處理應(yīng)用
2. 視頻解碼器
ADV7280/ADV7280-M是功能豐富的單芯片、多格式視頻解碼器。ADV7280/ADV7280-M可自動(dòng)檢測(cè)標(biāo)準(zhǔn)模擬基帶視頻信號(hào),兼容 復(fù)合、S視頻和分量視頻形式的NTSC、PAL和SECAM全球標(biāo)準(zhǔn)信號(hào)。ADV7280可將模擬視頻信號(hào)轉(zhuǎn)換為4:2:2分量視頻數(shù)據(jù)流,其與8位 ITU-R BT.656接口標(biāo)準(zhǔn)兼容。ADV7280-M可將模擬視頻信號(hào)轉(zhuǎn)換為兼容移動(dòng)工業(yè)處理器接口(MIPI?) CSI-2(8位YUV)的輸出視頻流。ADV7280/ADV7280-M的模擬視頻輸入端支持單端信號(hào)。ADV7280提供4個(gè)模擬輸入,而 ADV7280-M提供8個(gè)模擬輸入。ADV7280和ADV7280-M支持I2P轉(zhuǎn)換。ADV7280/ADV7280-M通過雙線式串行雙向端口 (I2C兼容型)進(jìn)行編程,并且采用1.8 V CMOS工藝制造。該解碼器提供LFCSP封裝選項(xiàng),非常適合空間受限的便攜式應(yīng)用。
ADV7280功能框圖

詳細(xì)資料:ADV7280 10位、4倍過采樣SDTV視頻解碼器
ADV7125 (ADV?)是一款單芯片、三通道、高速數(shù)模轉(zhuǎn)換器,內(nèi)置三個(gè)高速、8位、帶互補(bǔ)輸出的視頻DAC、一個(gè)標(biāo)準(zhǔn)TTL輸入接口以及一個(gè)高阻抗、模擬輸出電流 源。它具有三個(gè)獨(dú)立的8位寬輸入端口。只需一個(gè)+5 V/+3.3 V單電源和時(shí)鐘便能工作。ADV7125還具有其它視頻控制信號(hào):復(fù)合SYNC和BLANK,以及省電模式。
ADV7125 功能框圖

詳細(xì)資料:ADV7125: 330MHz、三通道、8位高速視頻DAC
4.RGB-CVBS轉(zhuǎn)換器
AD725是一款極低成本通用RGB轉(zhuǎn)NTSC/PAL編碼器,可將紅色、綠色和藍(lán)色分量信號(hào)轉(zhuǎn)換為符合NTSC或PAL標(biāo)準(zhǔn)的相應(yīng)亮度(基帶振幅)和 色度(副載波振幅與相位)信號(hào)。同時(shí),這兩路輸出在片內(nèi)合并以提供復(fù)合視頻輸出。所有三路輸出均可供獨(dú)立使用,其電壓為驅(qū)動(dòng)75 Ω反向端接電纜所需的標(biāo)準(zhǔn)信號(hào)電平的兩倍。
AD725功能框圖
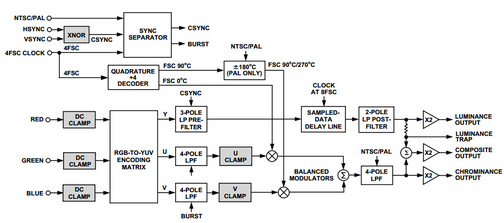
詳細(xì)資料:AD725 RGB轉(zhuǎn)NTSCPAL編碼器
5.視頻放大器
ADA4851-1(單通道)、ADA4851-2(雙通道)和ADA4851-4(四通道)均為低成本、高速、電壓反饋型、軌到軌輸出運(yùn)算放大器。雖 然這些器件成本較低,但仍能夠提供出色的整體性能和豐富多樣的功能。130 MHz的?3 dB帶寬和高壓擺率使這些放大器非常適合許多通用高速應(yīng)用。ADA4851系列設(shè)計(jì)采用+3 V至±5 V電源供電。這些器件具有單電源供電能力,輸入信號(hào)可擴(kuò)展至負(fù)供電軌以下200 mV、正供電軌的2.2 V范圍內(nèi)。放大器的輸出擺幅可達(dá)任一供電軌的60 mV范圍內(nèi)。
ADA4851-1引腳配置
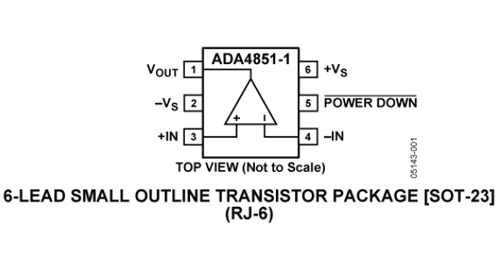
詳細(xì)資料:ADA4851-1 低成本、高速、軌到軌輸出運(yùn)算放大器
6. 溫度傳感器
ADT7311是一款窄體8引腳SOIC封裝高精度數(shù)字溫度傳感器。它內(nèi)置一個(gè)帶隙溫度基準(zhǔn)源和一個(gè)16位ADC,用來監(jiān)控溫度并進(jìn)行數(shù)字轉(zhuǎn)換,分辨率 為0.0078°C。默認(rèn)ADC分辨率設(shè)置為13位(0.0625°C)。ADC分辨率為用戶可編程模式,可通過串行接口更改。
ADT7311功能框圖

詳細(xì)資料:ADT7311 汽車應(yīng)用高精度數(shù)字SPI溫度傳感器
設(shè)計(jì)資源
硬件開發(fā)板
· BF60x標(biāo)準(zhǔn)評(píng)估板和擴(kuò)展板 · 前視ADAS開發(fā)套件 (請(qǐng)聯(lián)系A(chǔ)DI銷售部門)
BF60x DSP集成開發(fā)環(huán)境:CCES
標(biāo)準(zhǔn)軟件模塊
· ADAS視覺分析工具箱(AVAT) · Blackfin圖像處理工具箱(IPTBX)
· 二維圖形工具箱(GFX2D)
視覺ADAS框架和算法參考代碼
· LDW、FCW、TSR、HBA、PD函數(shù)
飛思卡爾高級(jí)駕駛員輔助系統(tǒng)(ADAS)解決方案
高級(jí)駕駛員輔助系統(tǒng)(ADAS)能夠在復(fù)雜的車輛操控過程中為駕駛員提供輔助和補(bǔ)充,并在未來最終實(shí)現(xiàn)無人駕駛。ADAS提供的功能包括自適應(yīng) 巡航控制、盲點(diǎn)監(jiān)測(cè)、車道偏離警告、夜視、車道保持輔助和碰撞警告系統(tǒng),具有自動(dòng)轉(zhuǎn)向和制動(dòng)干預(yù)功能。預(yù)測(cè)式ADAS可部分控制車輛的移動(dòng),預(yù)防事故發(fā) 生。這些自動(dòng)安全功能為今后的自主駕駛汽車鋪平了道路。從當(dāng)今的安全輔助車輛,到未來的自主駕駛汽車,飛思卡爾憑借在汽車、MCU、模擬和傳感器,以及數(shù) 字網(wǎng)絡(luò)產(chǎn)品組合等領(lǐng)域的專業(yè)技術(shù),推動(dòng)全球最具創(chuàng)新性的ADAS解決方案的發(fā)展。
高級(jí)駕駛員輔助系統(tǒng)應(yīng)用組成

高級(jí)駕駛員輔助系統(tǒng)(ADAS)之基礎(chǔ)型后視攝像頭
后視攝像頭系統(tǒng)可以幫助駕駛員發(fā)現(xiàn)車后的物體或人員,以便在確保安全的情況下倒車并順利停車入位。高級(jí)系統(tǒng)中部署100萬像素的高動(dòng)態(tài)范圍(HDR)攝 像頭,并通過非屏蔽雙絞線實(shí)現(xiàn)高性價(jià)比的高速以太網(wǎng)連接和視頻壓縮。其他系統(tǒng)要求包括適當(dāng)?shù)奈锢韺咏涌诤碗娫础8叨燃傻腝orivva MPC5604E 32位MCU采用Power Architecture?技術(shù),能夠處理視頻流化和攝像頭控制,將所需的通信帶寬降低至100 Mbps以下。MPC5604E MCU采用低延遲視頻壓縮和智能帶寬管理來提高圖像質(zhì)量。MPC5604E MCU支持與以太網(wǎng)AVB兼容的IEEE? 802.1AS精確時(shí)間協(xié)議(PTP),可實(shí)現(xiàn)攝像頭曝光的精確同步。
基礎(chǔ)型后視攝像頭結(jié)構(gòu)框圖

目標(biāo)應(yīng)用:帶有緊急剎車的倒車保護(hù)、盲點(diǎn)偵測(cè)、十字路口管理、行人偵測(cè)、環(huán)視泊車輔助系統(tǒng)
高級(jí)駕駛員輔助系統(tǒng)(ADAS)之智能后視攝像頭
智能后視攝像頭可在本地對(duì)視頻內(nèi)容進(jìn)行分析,以實(shí)現(xiàn)物體與行人偵測(cè)。此外,它們還支持全面的本地圖像處理及圖形疊加創(chuàng)建。它們能夠測(cè)量物體距離,并觸發(fā) 制動(dòng)干預(yù)。這種功能可以幫助駕駛員安全倒車,方便他們停入車位。飛思卡爾解決方案具有高集成度和低功耗的特點(diǎn),支持開發(fā)極小規(guī)格的攝像頭模塊。智能后視攝 像頭與簡(jiǎn)易型模擬攝像頭使用相同的接口,提供了一種極具吸引力的升級(jí)換代途徑。
智能后視攝像頭結(jié)構(gòu)框圖

目標(biāo)應(yīng)用:碰撞警告、行人偵測(cè)、智能后視攝像頭系統(tǒng)
高級(jí)駕駛員輔助系統(tǒng)(ADAS)之前視攝像頭
高級(jí)駕駛員輔助系統(tǒng)中的攝像頭系統(tǒng)可以分析視頻內(nèi)容,以便提供車道偏離警告(LDW)、自動(dòng)車道保持輔助(LKA)、遠(yuǎn)光燈/近光燈控制和交通標(biāo)志識(shí)別 (TSR)。在前視黑白攝像頭中,圖像傳感器會(huì)向配備DSP擴(kuò)展的雙核MCU提供傳入視頻幀,以進(jìn)行圖像處理。其他系統(tǒng)要求包括提供適當(dāng)?shù)奈锢?a href="http://www.qldv.cn/v/tag/13179/" target="_blank">通信接口、 電源、可選的DRAM以及可降低系統(tǒng)成本的嵌入式閃存。
前視攝像頭結(jié)構(gòu)框圖

目標(biāo)應(yīng)用:前視攝像頭模塊、大燈輔助(HLA)、車道偏離警告(LDW)、車道保持輔助(LKA)、交通標(biāo)志識(shí)別(TSR)
高級(jí)駕駛員輔助系統(tǒng)(ADAS)之環(huán)視泊車輔助系統(tǒng)
多攝像頭環(huán)視泊車輔助系統(tǒng)可以采集車輛四周的圖像,并以虛擬俯視圖的形式在屏幕上顯示。視角會(huì)根據(jù)行車軌跡而動(dòng)態(tài)移動(dòng),提供車輛四周360度的畫面。
高級(jí)系統(tǒng)通常采用LVDS或快速以太網(wǎng)等經(jīng)濟(jì)高效型鏈路,部署4到5個(gè)高動(dòng)態(tài)范圍(HDR) 100萬像素?cái)z像頭。可以使用視頻壓縮來減少所需的通信帶寬并降低布線要求(例如,可以使用非屏蔽雙絞線或同軸電纜)。
環(huán)視泊車輔助系統(tǒng)框圖

目標(biāo)應(yīng)用:盲點(diǎn)偵測(cè)、十字路口管理、泊車輔助、環(huán)視泊車輔助系統(tǒng)
高級(jí)駕駛員輔助系統(tǒng)(ADAS)77 GHz雷達(dá)系統(tǒng)
77 GHz雷達(dá)系統(tǒng)支持帶有或不帶自動(dòng)轉(zhuǎn)向與制動(dòng)干預(yù)功能的自適應(yīng)巡航控制、防撞保護(hù)和碰撞警告系統(tǒng)。在碰撞警告系統(tǒng)中,雷達(dá)芯片組可以檢測(cè)和跟蹤目標(biāo),根據(jù)前方交通狀況自動(dòng)調(diào)整車輛的速度并控制與前車的距離,在即將發(fā)生碰撞時(shí)向駕駛員發(fā)出警告并啟動(dòng)緊急制動(dòng)干預(yù)。
77 GHz雷達(dá)系統(tǒng)框圖

目標(biāo)應(yīng)用:自適應(yīng)巡航控制(ACC)、盲點(diǎn)偵測(cè)(BSD)、緊急制動(dòng)、前方碰撞警告(FCW)、間距警報(bào)、事故減輕與制動(dòng)輔助、防撞偵測(cè)、后方碰撞保護(hù)(RCP)、停止和行駛
飛思卡爾 高級(jí)駕駛員輔助系統(tǒng)77 GHz雷達(dá)系統(tǒng)參考設(shè)計(jì)
概述
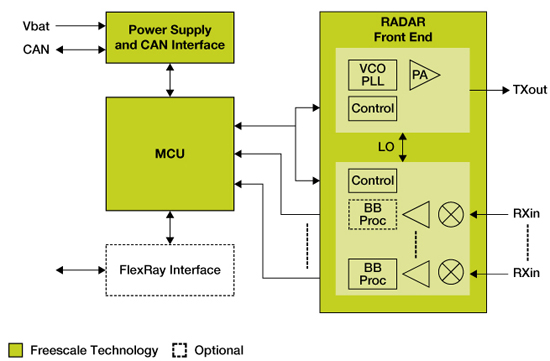
77 GHz雷達(dá)系統(tǒng)支持帶有或不帶自動(dòng)轉(zhuǎn)向與制動(dòng)干預(yù)功能的自適應(yīng)巡航控制、防撞保護(hù)和碰撞警告系統(tǒng)。在碰撞警告系統(tǒng)中,雷達(dá)芯片組可以檢測(cè)和跟蹤目標(biāo),根據(jù)前方交通狀況自動(dòng)調(diào)整車輛的速度并控制與前車的距離,在即將發(fā)生碰撞時(shí)向駕駛員發(fā)出警告并啟動(dòng)緊急制動(dòng)干預(yù)。
飛思卡爾的高性能多核Qorivva 32位MCU整合了飛思卡爾77 GHz雷達(dá)收發(fā)器芯片組,支持長(zhǎng)、中、短距離應(yīng)用,具備領(lǐng)先的性能和集成功能。這種可擴(kuò)展雷達(dá)解決方案支持生成和處理復(fù)雜的信號(hào),適合多種安全應(yīng)用。
77 GHz雷達(dá)系統(tǒng)框圖
參考器件

1.微控制器(MCU):
Qorivva MPC567xK系 列基于Power Architecture?的32位MCU為高級(jí)駕駛員輔助系統(tǒng)(ADAS)應(yīng)用提供極具吸引力的低成本解決方案。該系列增加了芯片的存儲(chǔ)器,提升了運(yùn)行 速度和性能,能夠支持自適應(yīng)巡航控制、智能大燈控制、車道偏離警告和盲點(diǎn)探測(cè)等應(yīng)用。Qorivva MPC567xK微控制器是SafeAssure功能安全解決方案。
Qorivva MPC567xK結(jié)構(gòu)框圖

詳細(xì)資料:MPC567xK 面向ADAS應(yīng)用的Qorivva 32位MCU
Qorivva MPC5561 MCU 基于Power Architecture?技術(shù),專為高級(jí)駕駛員輔助應(yīng)用而設(shè)計(jì),完美地實(shí)現(xiàn)了高性能計(jì)算和信號(hào)處理能力的結(jié)合。它采用FlexRayTM網(wǎng)絡(luò)控制器和飛 思卡爾的高能效e200內(nèi)核,專門針對(duì)高級(jí)汽車安全應(yīng)用而增強(qiáng)了性能Qorivva MPC5561既能幫助您控制成本,又能設(shè)計(jì)日益復(fù)雜的應(yīng)用。軟件和引腳兼容性允許重復(fù)使用原有的軟件和硬件架構(gòu),從而保護(hù)對(duì)應(yīng)用代碼和開發(fā)工具的投資。
Qorivva MPC5561結(jié)構(gòu)框圖

詳細(xì)資料:MPC5561 面向高級(jí)駕駛員輔助應(yīng)用的Qorivva 32位MCU
2.電源與CAN接口:
MC33905是 第二代系統(tǒng)基礎(chǔ)芯片系列中的一款器件。它 集成了多種功能和增強(qiáng)型模塊設(shè)計(jì)。作為一個(gè)高級(jí)電源管理單元,此器件適用于MCU和附加集成電路,例如傳感器和CAN收發(fā)器。它有一個(gè)內(nèi)設(shè)增強(qiáng)型高速 CAN接口(ISO11898-2和-5),具有局部和總線故障診斷、保護(hù)功能以及故障安全操作模式。SBC可包含0、1或2個(gè)LIN2.1接口與LIN 輸出引腳開關(guān)連接。它包含兩個(gè)或者3個(gè)喚醒輸入引腳,可配置為輸出驅(qū)動(dòng)器以實(shí)現(xiàn)靈活性。
MC33905結(jié)構(gòu)框圖
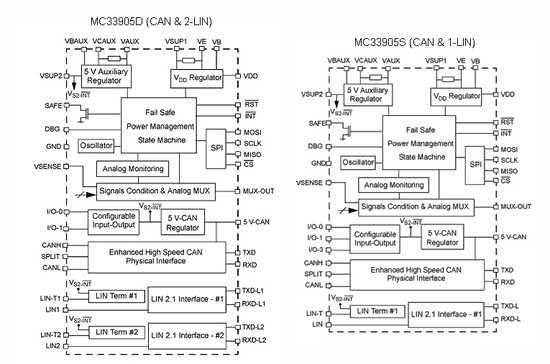
詳細(xì)資料:MC33905 帶高速CAN和LIN的第二代系統(tǒng)基礎(chǔ)芯片
3.RADAR前端:
MR2001是飛思卡爾的一款高性能77 GHz雷達(dá)收發(fā)器芯片組,可擴(kuò)展為多通道運(yùn)行,使單個(gè)雷達(dá)平臺(tái)具有電子波束操控功能和更寬的探測(cè)區(qū)域,可實(shí)現(xiàn)汽車安全系統(tǒng)、通信基礎(chǔ)設(shè)施和工業(yè)控制系統(tǒng)的長(zhǎng)距離、中距離和短距離雷達(dá)應(yīng)用。
MR2001雷達(dá)芯片組可支持多個(gè)并行有效Tx通道的快速調(diào)制,在較寬的探測(cè)區(qū)域內(nèi)實(shí)現(xiàn)卓越的空間分辨率和檢測(cè)精度。它在開環(huán)VCO雷達(dá)系統(tǒng)架構(gòu)內(nèi)支持各種線性調(diào)頻,并且功耗極低。集成式BB濾波器和VGA可節(jié)省總體物料成本。
MPC577xK MCU系列采用MR2001 77 GHz封裝雷達(dá)前端芯片組,為如自適應(yīng)巡航控制、緊急制動(dòng)系統(tǒng)、車道偏離警告和盲點(diǎn)檢測(cè)等ADAS應(yīng)用提供了一個(gè)完整的系統(tǒng)級(jí)雷達(dá)解決方案。
MR2001采用高級(jí)封裝技術(shù),可確保用戶PCB具有最高性能和極小的信號(hào)衰減。
MR2001簡(jiǎn)化應(yīng)用簡(jiǎn)化圖

詳細(xì)資料:MR2001 多通道77 GHz雷達(dá)收發(fā)器芯片組
世強(qiáng)高級(jí)汽車環(huán)視輔助駕駛系統(tǒng)(ADAS)方案
自Google無人駕駛技術(shù)被世人熟知后,與此相關(guān)的汽車輔助駕駛系統(tǒng)ADAS技術(shù)成為了眾人關(guān)注的焦點(diǎn)。世強(qiáng)高級(jí)汽車環(huán)視輔助駕駛系統(tǒng) (ADAS)方案,基于SH7766圖形處理器,此方案可以適用于汽車安全系統(tǒng),如車道偏離警告系統(tǒng)(LDW)等典型的ADAS應(yīng)用。
方案簡(jiǎn)介:
基于SH7766,世強(qiáng)聯(lián)合第三方設(shè)計(jì)公司開發(fā)出了一套高級(jí)汽車環(huán)視輔助駕駛系統(tǒng)方案(如下圖所示),堪稱分銷界首創(chuàng)!這套環(huán)視ADAS系統(tǒng)方案具有強(qiáng) 大的圖像處理能力,能實(shí)現(xiàn)超清晰圖像和高品質(zhì)色彩還原;完美的畫面明暗表現(xiàn),來自高動(dòng)態(tài)范圍的自動(dòng)調(diào)整;且只有極低的CPU占有率和功耗。此方案可以適用 于汽車安全系統(tǒng),如車道偏離警告系統(tǒng)(LDW)、車道保持輔助系統(tǒng)(LKAS)等典型的ADAS應(yīng)用。


圖:世強(qiáng)聯(lián)合第三方推出的高級(jí)汽車環(huán)視輔助駕駛系統(tǒng)方案框圖和Demo
本環(huán)視ADAS系統(tǒng)方案可提供兩種標(biāo)定模式-全自動(dòng)標(biāo)定模式和精準(zhǔn)標(biāo)定模式:
1. 全自動(dòng)標(biāo)定模式是強(qiáng)大、可靠的,并不需要相機(jī)安裝角度的苛刻要求;適應(yīng)大規(guī)模生產(chǎn)
2. 在光照條件很差,或惡劣環(huán)境條件下,可以采用半自動(dòng)精準(zhǔn)校定工具,提供最好的標(biāo)定結(jié)果。另外,該系統(tǒng)方案支持超級(jí)虛擬相機(jī)模式,可以生成在任意視角下的虛擬視圖,且可任意使用虛擬相機(jī)參數(shù),焦點(diǎn),生成視圖,魚眼和針眼相機(jī)都適合。
世強(qiáng)環(huán)視ADAS方案的其他特點(diǎn)還包括:
1. 支持基于環(huán)視原理的車道偏離駕駛預(yù)警模式:基于環(huán)視的車道偏離技術(shù)打開了新的領(lǐng)域,擴(kuò)展了環(huán)視駕駛輔助系統(tǒng)的應(yīng)用;
2. 俯視圖的可見區(qū)域大小一鍵更改 ;
3. 俯視圖完美拼接和分割效果;
4. 多種模塊的備選(包括:3D效果的環(huán)視界面;DVR ;基于3G的視頻查看和信息管理;語音倒車指南等)。
表1:高級(jí)汽車環(huán)視輔助駕駛系統(tǒng)方案的關(guān)鍵元器件推薦

關(guān)于SH7766
SH7766如下幾大圖像處理優(yōu)勢(shì)特別引人注目:
1. 周邊物體檢測(cè) (支持4路攝像頭)
SH7766 SoC配備六個(gè)視頻輸入通道。其中,四個(gè)通道采用NTSC模數(shù)轉(zhuǎn)換器(ADC)。這表示單芯片上即可提供NTSC攝像系統(tǒng)的必要功能。另外,還可以利用六 個(gè)視頻輸入通道實(shí)現(xiàn)多個(gè)應(yīng)用,使用在一枚芯片上提供的各項(xiàng)功能。例如在正常行駛時(shí)可利用數(shù)字雙通道輸入,在十字路口和停車時(shí)則切換成NTSC四通道輸入。
2. 高性能圖像識(shí)別引擎
SH7766 SoC配備IMP-X2新一代圖像識(shí)別引擎。IMP-X2在與瑞薩現(xiàn)有圖像處理引擎(IMP)保持?jǐn)?shù)據(jù)庫(kù)兼容性的同時(shí),將處理性能提高至約四倍以上,應(yīng)此 使其能并行執(zhí)行多個(gè)處理任務(wù),例如跟蹤車道、標(biāo)志和標(biāo)線、行人及車輛等。此外它還新增了多項(xiàng)功能,例如全景圖像生成,該功能廣泛使用了通過行人、車輛等判 斷處理的圖像識(shí)別算法。通過IMP-X2與進(jìn)行處理判斷的同一芯片上的CPU之間的協(xié)作,在保持低功耗的同時(shí)實(shí)現(xiàn)了先進(jìn)的圖像識(shí)別性能。
3. 集成DRC, 支持亮度糾正和補(bǔ)償
依托動(dòng)態(tài)范圍控制(DRC ,Dynamic Range Control)功能,即使是處理向陽處和背陰處這種亮度大不相同的多個(gè)視頻圖像,還能調(diào)整復(fù)合視頻亮度,補(bǔ)償過亮和過暗,以便駕駛員更清晰地看清圖像顯示。
4. 內(nèi)置扭曲校正硬件 IMR
圖像渲染器(IMR, Image Render Engine)視點(diǎn)轉(zhuǎn)換引擎可實(shí)時(shí)制作出因視頻輸入或場(chǎng)景而異的視點(diǎn)俯視圖像,利用三角網(wǎng)格校正失真的模式、自動(dòng)生成矩形網(wǎng)格內(nèi)的頂點(diǎn)數(shù)據(jù),對(duì)圖像進(jìn)行失真校正,旋轉(zhuǎn),縮小或放大。
更多方案:
適用于高級(jí)駕駛輔助系統(tǒng)的雷達(dá)和功能安全技術(shù)
德州儀器高級(jí)駕駛員輔助系統(tǒng)(ADAS)設(shè)計(jì)
瑞薩電子3大ADAS檢測(cè)系統(tǒng)解決方案簡(jiǎn)述
TI先進(jìn)駕駛員輔助系統(tǒng)(ADAS)解決方案
?
?
?
?
?
?
?
















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論