 電子發(fā)燒友App
電子發(fā)燒友App


隨著復雜傳感器和大型數(shù)據(jù)庫技術(shù)的發(fā)展,城市系統(tǒng)中越來越多的時空數(shù)據(jù)被記錄和存儲。對這些時空數(shù)據(jù)的演化模式進行預測學習是城市計算中一個基本但重要的循環(huán),可以更好地支持城市智能管理決策,特別是在交通、環(huán)境、安全、公共衛(wèi)生等領域。由于傳統(tǒng)的統(tǒng)計學習和深度學習方法難以捕捉城市時空數(shù)據(jù)中的復雜關聯(lián),近年來提出了時空圖神經(jīng)網(wǎng)絡(STGNN)框架。STGNN通過整合圖神經(jīng)網(wǎng)絡(GNNs)和各種時間學習方法,使復雜時空依賴關系的提取成為可能。然而,對于不同的預測學習任務,如何在STGNN框架中有效設計空間依賴學習模塊、時間依賴學習模塊和時空依賴融合方法,是一個具有挑戰(zhàn)性的問題。本文對城市計算中用于預測學習的STGNN技術(shù)的最新進展進行了全面的綜述。我們首先簡要介紹了時空圖數(shù)據(jù)的構(gòu)建方法和stgnn中使用的流行深度學習模型。然后我們從現(xiàn)有文獻中梳理出主要的應用領域和具體的預測學習任務。接著分析了STGNN框架的設計方法以及近年來與一些先進技術(shù)的結(jié)合;最后總結(jié)了現(xiàn)有研究的局限性,并提出了一些潛在的方向。
1. 引言
隨著傳感和數(shù)據(jù)流處理技術(shù)的快速進步,城市系統(tǒng)中越來越多的數(shù)據(jù)被高效地收集和存儲,為城市計算時代的到來奠定了基礎。城市計算旨在從大數(shù)據(jù)爆發(fā)的不同應用領域(如交通、環(huán)境、安全等)了解城市的模式和動態(tài)。根據(jù)城市計算理論[1],基于這些海量城市數(shù)據(jù)的預測學習是最重要的循環(huán),其中是智慧城市智能決策、調(diào)度和管理的基礎。此外,城市大數(shù)據(jù)的可預測性也可以為數(shù)字孿生、元宇宙[2]等一些新技術(shù)的發(fā)展提供可能。
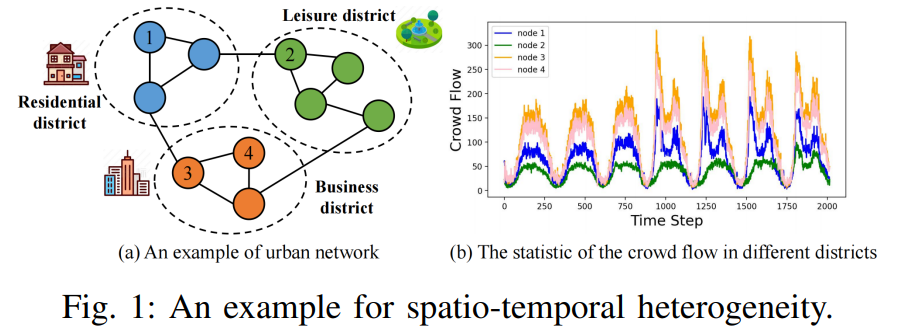
大多數(shù)城市數(shù)據(jù)是時空數(shù)據(jù),即它們不僅與空間位置相關,而且隨著時間的推移而變化。相關性和異質(zhì)性是時空數(shù)據(jù)在城市系統(tǒng)[3]中普遍存在的屬性。相關性是指數(shù)據(jù)不僅在時間維度上而且在空間維度上具有自相關性的屬性;異質(zhì)性是指數(shù)據(jù)在不同的時間或空間范圍內(nèi)呈現(xiàn)出不同模式的屬性。為了更直觀地說明時空異質(zhì)性,我們在圖1中給出了一個例子。如圖1(a)所示,給定的城市網(wǎng)絡中存在不同的區(qū)域,如住宅區(qū)、休閑區(qū)和商業(yè)區(qū)。圖1(b)顯示了不同區(qū)域在不同節(jié)點的人流統(tǒng)計情況。我們可以發(fā)現(xiàn),雖然所有選取的節(jié)點都呈現(xiàn)出明顯的峰值模式,但不同區(qū)域節(jié)點的人群流量統(tǒng)計存在較大差異。但是,在相同的區(qū)域,即使在不同的節(jié)點,如節(jié)點3和節(jié)點4,人群流量的統(tǒng)計也是相似的。由于這些復雜的時空特性,增加了特征工程的難度,一些在傳統(tǒng)數(shù)據(jù)預測中表現(xiàn)良好的方法,如支持向量回歸(SVR)[4]、隨機森林(RF)[5]、梯度提升決策樹(GBDT)[6]等,難以取得更準確的預測結(jié)果。近十年來,由于深度學習技術(shù)的快速發(fā)展,一些基于卷積神經(jīng)網(wǎng)絡(CNN)[7]和循環(huán)神經(jīng)網(wǎng)絡(RNN)[8]的混合神經(jīng)網(wǎng)絡,如ConvLSTM[9]、PredRNN[10]等,逐漸被應用于城市時空數(shù)據(jù)的預測學習,并獲得了顯著的優(yōu)勢。然而,這些方法最大的局限性在于無法直接從存在于非歐氏空間的數(shù)據(jù)中進行學習,如交通網(wǎng)絡數(shù)據(jù)、傳感器網(wǎng)絡數(shù)據(jù)、語義網(wǎng)絡數(shù)據(jù)等。
近年來,以圖為代表的深度學習技術(shù)神經(jīng)網(wǎng)絡(GNN)在非歐氏空間數(shù)據(jù)的表示學習方面取得了重大突破,為多樣化和復雜的城市數(shù)據(jù)的預測學習奠定了基礎。考慮到一些典型城市數(shù)據(jù)的時空特性,如交通網(wǎng)絡流量、環(huán)境監(jiān)測數(shù)據(jù)等,之前的一些工作將圖神經(jīng)網(wǎng)絡與各種時間學習網(wǎng)絡相結(jié)合,以捕獲空間和時間維度上的動態(tài)[3]。這種類型的混合神經(jīng)網(wǎng)絡架構(gòu)被統(tǒng)稱為時空圖神經(jīng)網(wǎng)絡(STGNN)。通過過去五年的發(fā)展,時空圖神經(jīng)網(wǎng)絡已經(jīng)被廣泛應用于城市計算的預測學習場景,包括交通、環(huán)境、安全、公共衛(wèi)生、能源、經(jīng)濟等領域。基于谷歌學者搜索引擎,通過關鍵詞進行精準搜索,統(tǒng)計近5年相關論文的發(fā)表情況。如圖2所示,我們可以發(fā)現(xiàn),關于STGNN的相關論文呈現(xiàn)逐年遞增的趨勢。2018年相關論文不足20篇,而2022年論文接近140篇。這一發(fā)展趨勢表明,與STGNN相關的應用已成為近年來的研究熱點。此外,過去五年的文獻大多集中在預測性學習任務上。
相關調(diào)研近年來,關于基于STGNN的預測學習技術(shù)在不同領域的應用已經(jīng)有了一些相關調(diào)研。Wang et al.[3]綜述了截至2020年的時空數(shù)據(jù)挖掘深度學習方法,其中涉及到預測學習中的一些STGNN技術(shù)。之前的調(diào)查[11]-[13]都調(diào)查了應用于交通領域的STGNN技術(shù)。其中,[11]分析了多個實際問題,綜述了城市交通系統(tǒng)中預測、檢測和控制問題的相關工作。[12]和[13]重點介紹了STGNN在交通預測任務中的最新技術(shù)。工作[14]研究了生成式對抗技術(shù)在時空中的應用數(shù)據(jù)學習,包括一些與時空圖數(shù)據(jù)相結(jié)合的方法。
我們的貢獻與之前的調(diào)研相比,我們調(diào)查的貢獻總結(jié)為:
據(jù)我們所知,這是第一個全面的綜述,回顧了最近探索STGNN在城市計算中的預測性學習任務的工作。我們通過充分的文獻,主要從應用和方法的角度回顧了STGNN的進展。
我們首先根據(jù)現(xiàn)有文獻對STGNN在城市計算中的主要應用領域和特定預測學習任務進行了分類。此外,我們還整理了一些與之前關于STGNN的工作附帶的公開數(shù)據(jù)集。
對STGNN的時間依賴學習、空間依賴學習和時空依賴融合方法進行了深入分析。我們還回顧了近年來一些流行的與STGNN結(jié)合的先進方法。
我們總結(jié)了STGNN為城市計算中的預測性學習任務所分享的一些挑戰(zhàn),并為解決這些具有挑戰(zhàn)性的問題提出了一些未來方向。
本調(diào)研的組織本調(diào)研的其余部分組織如下。第二節(jié)介紹了時空圖的構(gòu)建。第三節(jié)概述了不同領域的各種預測性學習任務,這些任務可以通過STGNN來解決。第四節(jié)介紹了在STGNN框架中廣泛采用的基本深度學習架構(gòu)。第五節(jié)深入分析了STGNN框架的神經(jīng)架構(gòu)設計方法和一些可以結(jié)合的流行先進技術(shù)。第V節(jié)討論了現(xiàn)有工作的局限性,并提出了未來的方向。最后,我們在第VI節(jié)中總結(jié)了這一調(diào)查。
時空圖神經(jīng)網(wǎng)絡
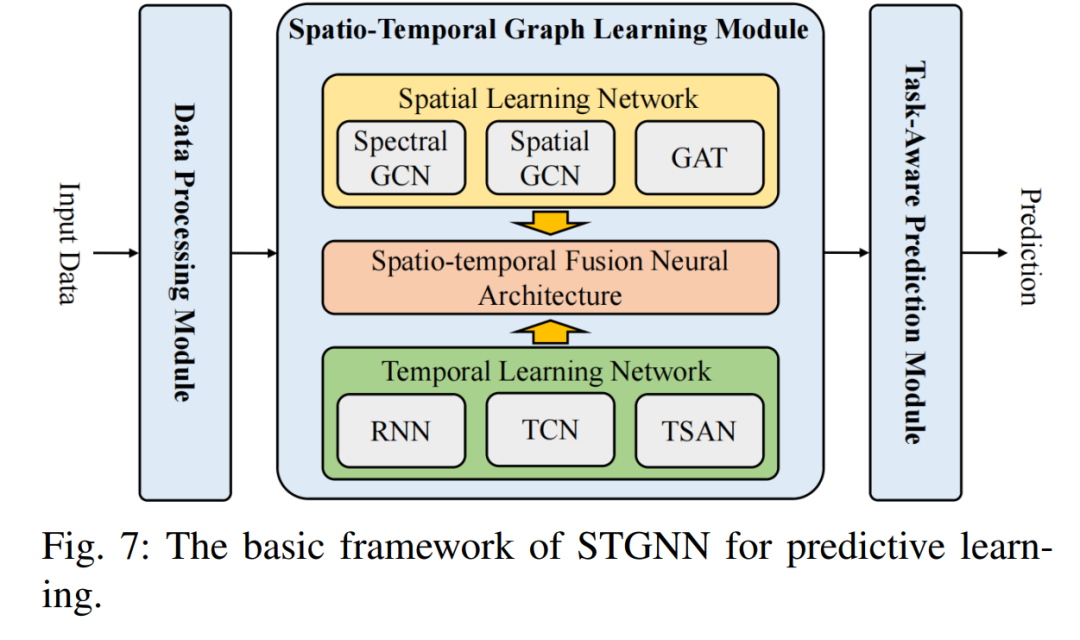
在本節(jié)中,我們介紹STGNN的基本神經(jīng)架構(gòu)。如圖7所示,用于預測學習的STGNN的基本框架包含三個主要模塊——數(shù)據(jù)處理模塊(DPM)、時空圖學習模塊(STGLM)和任務感知預測模塊(TPM)。對于城市計算中的預測學習任務,DPM旨在從原始數(shù)據(jù)中構(gòu)建時空圖數(shù)據(jù),STGLM旨在從復雜社會系統(tǒng)中捕獲隱藏的時空依賴關系,TPM旨在將來自STGLM的時空隱藏表示映射到下游預測任務的空間中。STGLM是STGNN中最關鍵的部分,STGNN通常通過一定的時空融合神經(jīng)架構(gòu)將空間學習網(wǎng)絡和時間學習網(wǎng)絡有機結(jié)合。對于空間學習網(wǎng)絡,譜圖卷積網(wǎng)絡(spectral GCNs)、空間圖卷積網(wǎng)絡(spatial GCNs)和圖注意力網(wǎng)絡(GATs)都可以作為選擇對象。對于時間學習網(wǎng)絡,循環(huán)神經(jīng)網(wǎng)絡(RNNs)、時間卷積網(wǎng)絡(TCNs)和時間自注意力網(wǎng)絡(tans)都可以作為替代方案。與STGLM相比,TPM是一個相對簡單的神經(jīng)網(wǎng)絡,因此幾乎所有現(xiàn)有工作都集中在STGLM中神經(jīng)架構(gòu)的設計上
?
改進的STGNN時空依賴學習方法
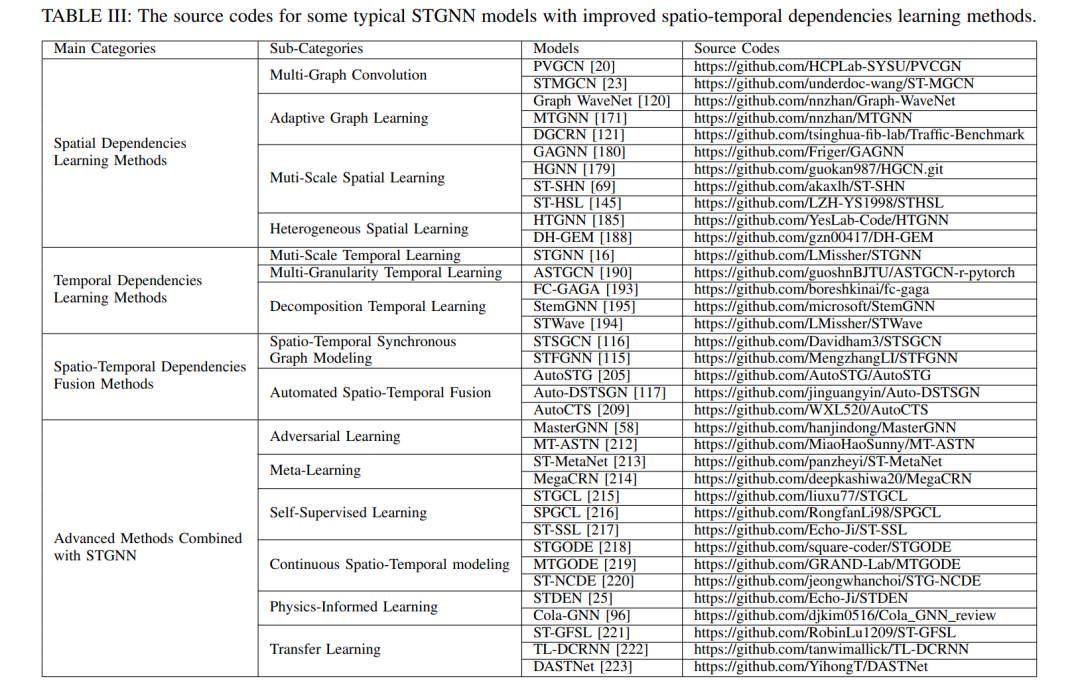
在第四節(jié)中,我們介紹了STGNN的基本神經(jīng)架構(gòu),增強了對STGNN中時空學習泛化范式的理解。然而,近年來出現(xiàn)了許多前沿方法來改進時空依賴關系的學習。在本節(jié)中,我們總結(jié)并分析了最近STGNN模型中一些改進的時空依賴學習方法。
挑戰(zhàn)和未來方向
我們研究了社會系統(tǒng)中預測學習的STGNN的應用,基本神經(jīng)架構(gòu)和最近的進展。雖然近年來STGNN模型取得了顯著的性能,但仍有一些具有挑戰(zhàn)性的問題有待解決,這些問題指向了潛在的未來研究方向。我們總結(jié)了這些挑戰(zhàn)并提出潛在可行的研究方向如下:
缺乏可解釋性: 到目前為止,絕大多數(shù)與stgnn相關的工作都專注于通過復雜的模型設計來提高預測性能。然而,關于模型可解釋性的研究一直相對缺乏,即我們無法清楚地了解哪些時空特征在提高預測性能方面起主導作用。在最近的工作中,STNSCM[241]提出構(gòu)建因果圖來描述自行車流量預測,并分析時空特征與預測結(jié)果之間的因果關系。基于因果關系的時空圖建模可能是增強STGNN模型可解釋性的一個潛在方向。
缺乏校準方法: 不確定性量化對實際工業(yè)生產(chǎn)具有重要意義,它反映了對模型預測結(jié)果的信任程度。為了提高深度模型的可信度,需要適當?shù)哪P托史椒ǎ陙碓趫D像識別[242]和圖表示學習[243]中得到了廣泛應用。目前僅有works[244]、[245]對STGNN模型的不確定性進行了研究,對標定方法的研究較少。STGNN模型的校準需要同時考慮空間和時間的特性,因此比以往的相關工作更具挑戰(zhàn)性。
缺乏物理約束: 在之前的大多數(shù)工作中,STGNN模型通過深度神經(jīng)網(wǎng)絡的集成來捕獲復雜的時空依賴關系,同時忽略了對不同應用領域物理約束的考慮,這使得模型在一些專業(yè)領域的認準度較低。近年來,雖然一些用于疫情預測的STGNN模型結(jié)合了專業(yè)微分方程作為物理約束[95]-[99],但這樣的工作仍然缺乏,在其他應用領域還需要改進。
缺乏預訓練技術(shù): 近年來,預訓練技術(shù)在時間序列和圖表示學習領域得到了很大發(fā)展,但在STGNN相關工作中相對缺乏。在最近的工作中,STEP[246]提出了一種結(jié)合掩碼自編碼器(MAE)[247]架構(gòu)的預訓練模型,以從非常長期的歷史時空圖數(shù)據(jù)中高效地學習時間模式。在未來,長程空間和長期時間學習的預訓練技術(shù)是必要的,這對STGNN模型的可擴展性和可部署性有很大價值。
分布轉(zhuǎn)移的障礙:?時空數(shù)據(jù),如道路網(wǎng)絡上的交通流量,往往從不同的位置和時間段收集,導致訓練集、驗證集和測試集的分布存在顯著差異。這可能會給STGNNs帶來挑戰(zhàn),因為由于分布偏移,在一個數(shù)據(jù)集上訓練模型可能在驗證集和測試集上表現(xiàn)不佳,這類似于域適應中的分布偏移問題(在訓練和測試階段之間,輸入和輸出的聯(lián)合分布不同)。盡管這一問題很重要,但在時空研究界受到的關注卻較少。雖然一些研究[248]調(diào)查擊敗了時間序列中的分布變化,但它們未能編碼位置之間的空間相關性。
探索新的訓練策略:之前的研究主要集中在引入具有復雜層或模塊的新型stgnn,以增強人類移動性分析。然而,另一個有希望的方向是研究新的訓練策略。例如,在交通預測任務中,每個位置都被平等對待,屬于這些位置的數(shù)據(jù)被聯(lián)合送入神經(jīng)網(wǎng)絡。然而,對每個位置的時空相關性進行建模的復雜性可能會發(fā)生顯著變化,需要一種新的訓練策略,如課程學習。課程學習從更簡單的數(shù)據(jù)開始,在越來越困難的數(shù)據(jù)上訓練一個機器學習模型,并可能有效地解決這個問題。此外,STGNNs的其他潛在訓練策略包括多任務學習、遷移學習和持續(xù)學習。通過探索新的訓練策略,我們可以提高STGNNs的性能和精度,并使它們能夠處理更復雜的任務。
可擴展性問題:設計高效的STGNNs的一個特別具有挑戰(zhàn)性的案例是當傳感器網(wǎng)絡中的位置數(shù)量非常大時。例如,在PEMS系統(tǒng)中有超過10000個環(huán)路檢測器。在這種情況下,需要開發(fā)STGNNs,在保持高預測精度的同時,能夠高效地處理和分析網(wǎng)絡產(chǎn)生的大量時空數(shù)據(jù)。在這種情況下,更高效的AI解決方案是值得贊賞的,例如通過模型修剪/蒸餾、圖采樣技術(shù),或探索具有高效率的下一代AI模型。也有一些研究探索了無圖方法[249],以在擴展到大規(guī)模傳感器網(wǎng)絡時減少計算成本。
結(jié)論
本文對城市計算中用于預測學習的時空圖神經(jīng)網(wǎng)絡(STGNNs)進行了系統(tǒng)的綜述。我們首先從時空圖數(shù)據(jù)的基本形式和構(gòu)建方法入手,然后總結(jié)城市計算中不同應用領域的STGNNs所涉及的預測學習任務。接下來,我們從基本神經(jīng)網(wǎng)絡架構(gòu)的角度出發(fā),介紹構(gòu)成STGNNs的空間學習網(wǎng)絡和時間學習網(wǎng)絡的基本組成部分,如圖神經(jīng)網(wǎng)絡(GNNs)、循環(huán)神經(jīng)網(wǎng)絡(RNNs)、時間卷積網(wǎng)絡(TCNs)、自注意力網(wǎng)絡(SANs)、并總結(jié)了這些時空神經(jīng)網(wǎng)絡架構(gòu)的基本融合形式。為了進一步追蹤STGNNs近年來的前沿進展,我們以空間依賴學習方法、時間依賴學習方法、時空依賴融合方法等可結(jié)合的先進技術(shù)為主線,總結(jié)了相關的典型工作。最后,總結(jié)了當前研究面臨的挑戰(zhàn),并提出了一些潛在的方向。
編輯:黃飛
?














 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論