 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
成分
|
阿杜諾納米
?
|
× 1 |
|
定制電路板
線路板
|
× 1 |
|
?
|
× 1 |
描述
帶藍(lán)牙的微型戰(zhàn)斗機 BOT
?
嘿大家怎么了!
?
?
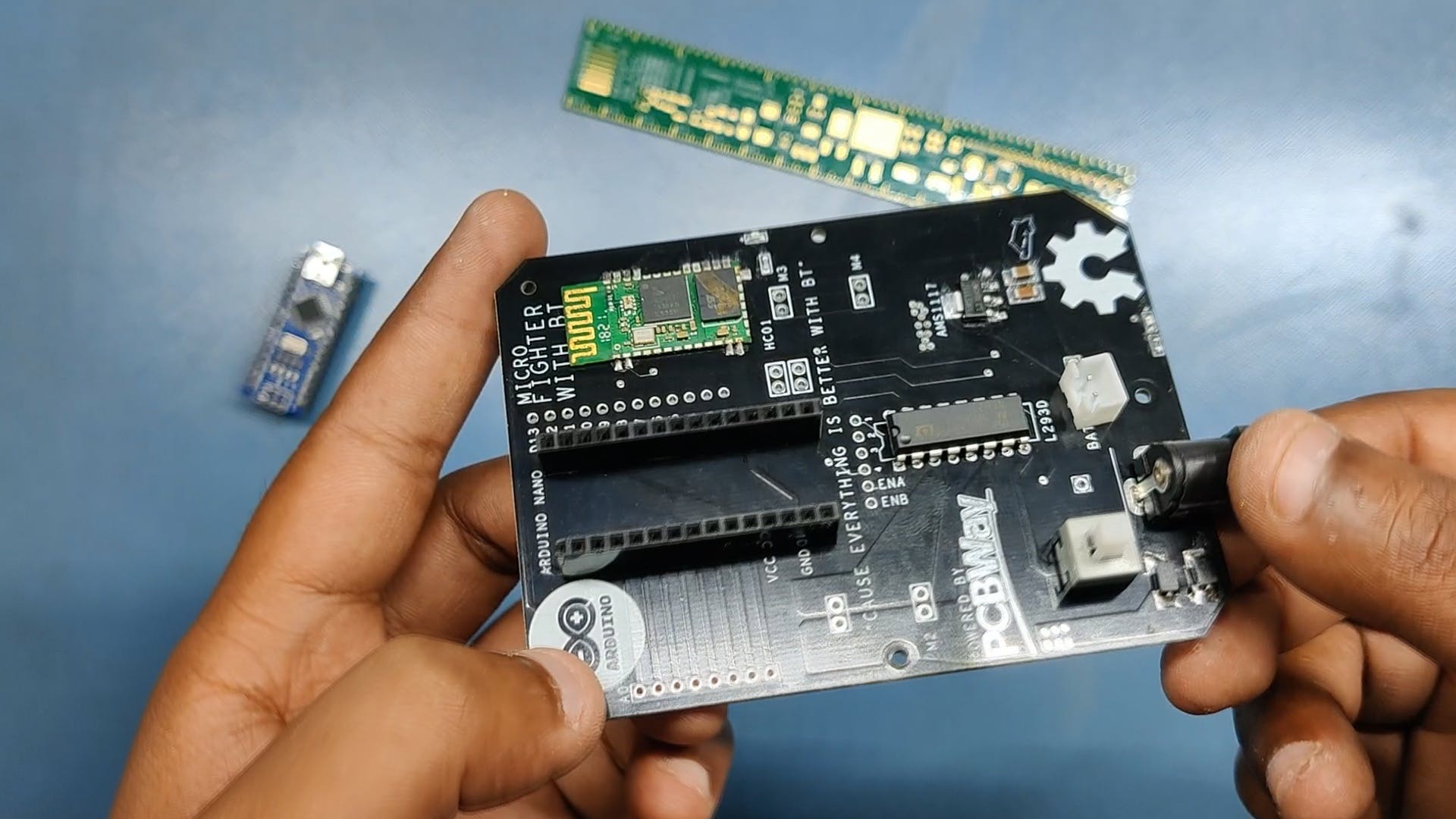
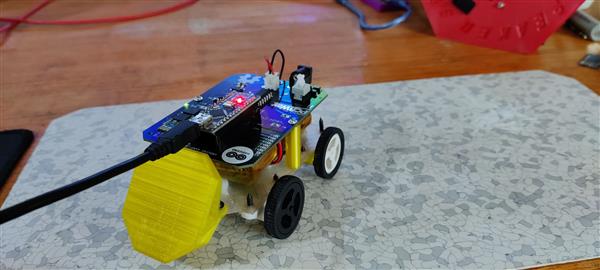
這是我的 Micro Fighter Bot 或 Micro Robot V2,它是一個易于制作的微型機器人,由 Arduino Nano 板和 L293D 電機驅(qū)動器 IC 供電。
?
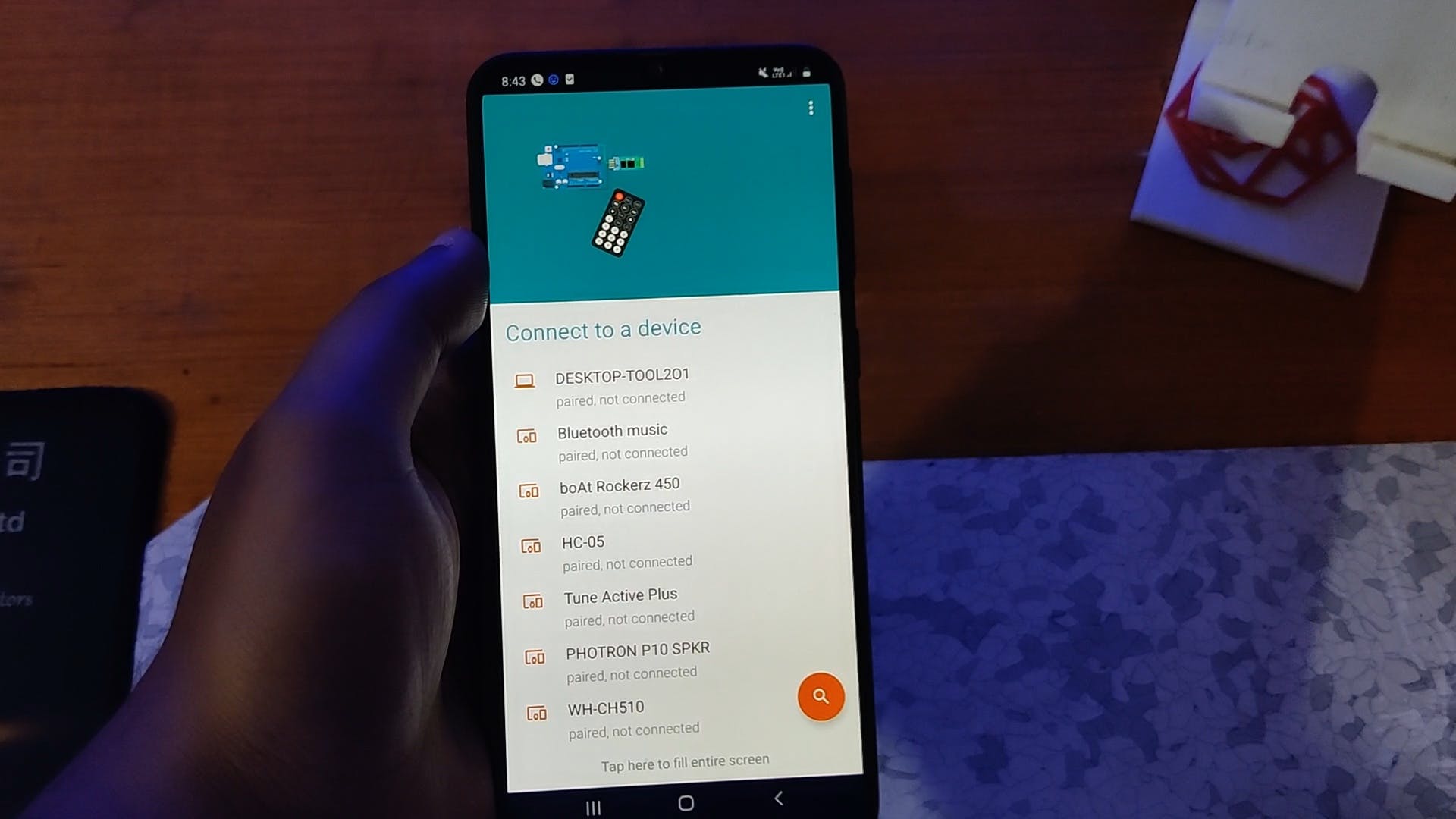
我正在使用 google play store 上提供的基于藍(lán)牙的移動終端應(yīng)用程序來控制這個機器人。?
?
是的,我在這里使用藍(lán)牙,好的舊 HC01 模塊。
?
機器人背后的想法
?
制作機器人的目標(biāo)是制作一個小型機器人平臺,我可以在我的下一個項目中使用它,這是一個格斗機器人組合。基本上,我想準(zhǔn)備一個小而快的機器人,可以和其他小機器人戰(zhàn)斗,不是死戰(zhàn),而是普通的相撲比賽。
?
?
之前,我做了一個類似的只有兩個輪子的微型機器人,那個機器人的問題是穩(wěn)定性。
此外,它也不能很好地通過障礙物,例如巖石地形、急劇下降或低摩擦區(qū)域。
?
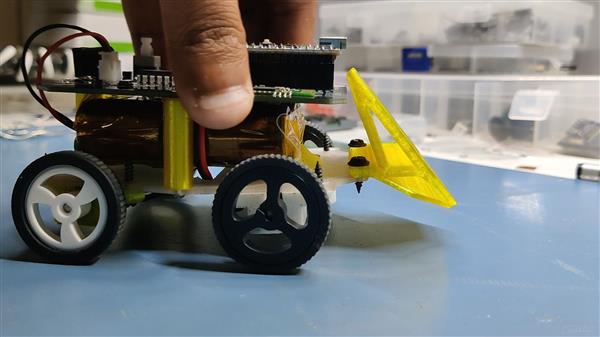
為了改善這一點,我準(zhǔn)備了這個有 4 個輪子的機器人,所以它有一個堅固的框架,重心位于機器人的最中心部分,因為這有助于高速急轉(zhuǎn)彎。
?
我在 Fusion360 中設(shè)計了這個機器人 首先,這里的想法是制作一個底座,用于從底座的底部擰緊電機支架,并且有 3 個支柱,可以在其上安裝 PCB。在 PCB 和底座之間,放置了一塊鋰離子電池。
所以這就是計劃。
?
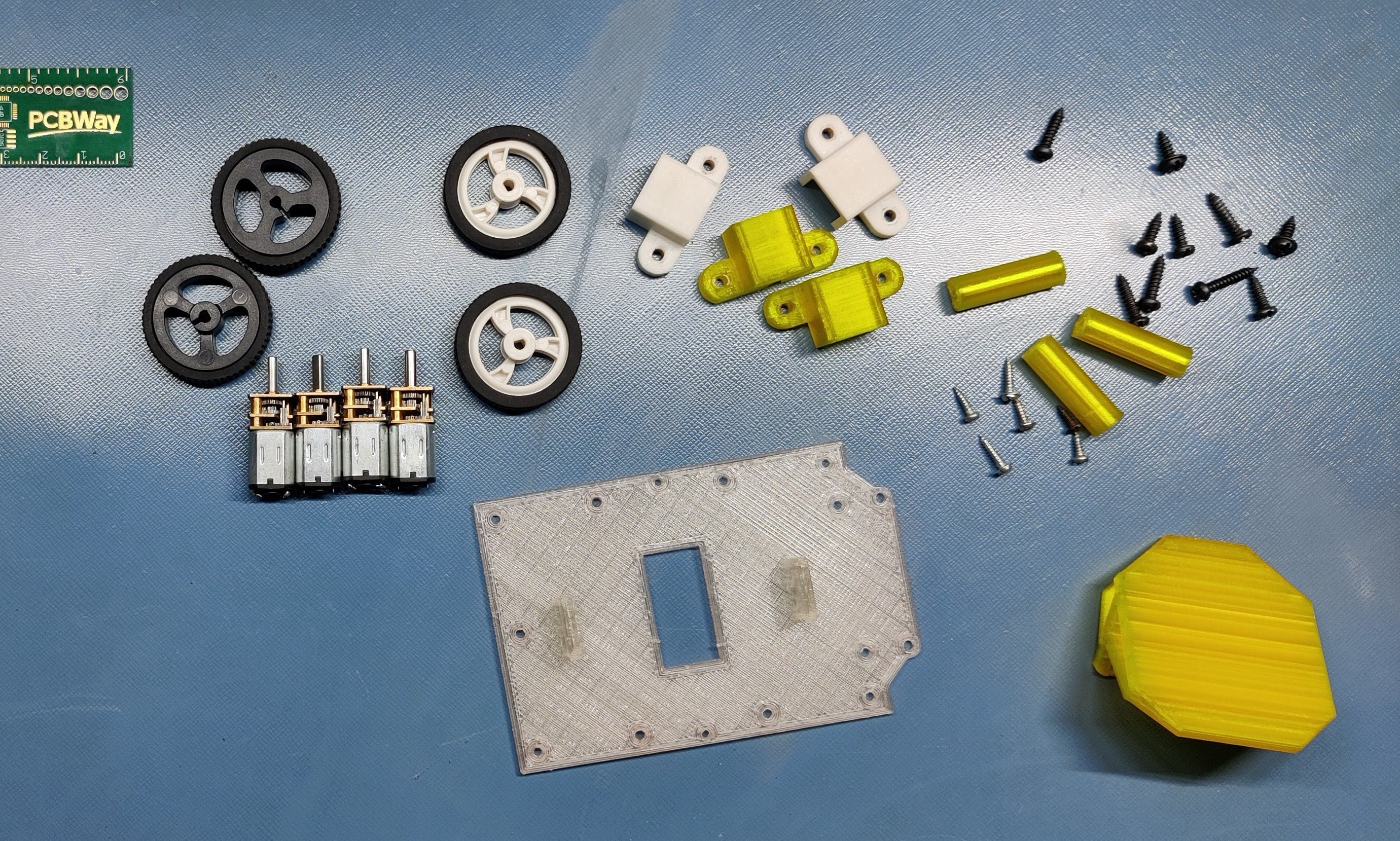
所需材料
3D打印零件-
- 底座 x 1
- 馬達(dá)座 x 4
- 前盾 x 1
- 柱子 x 3
?
成分
?
- L293D電機驅(qū)動IC
- 阿杜諾納米
- 定制PCB(由PCBWAY提供)
- 微型齒輪直流電機
- 母頭針
- DC 筒式千斤頂
- AMS1117
- 4.7uf Cap 1206 封裝
- 22uf Cap 1206 封裝
- 貼片 LED 0603 封裝
- 1K電阻0603封裝
- HC01模塊
- 電池 JST 連接器
?
?
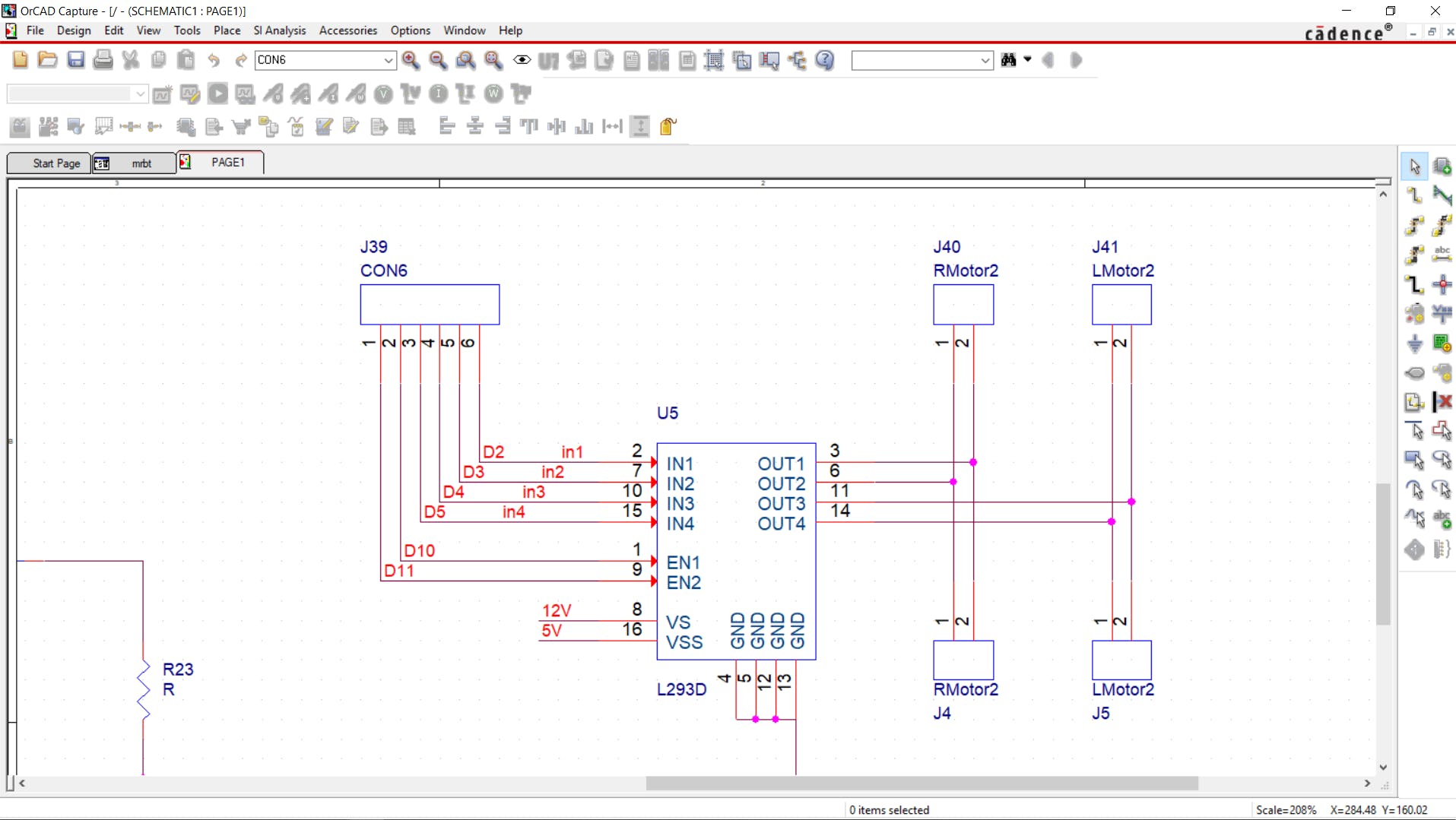
制作 PCB 項目的第一步是制作原理圖,其中包含我們運行項目所需的所有組件。
?
?
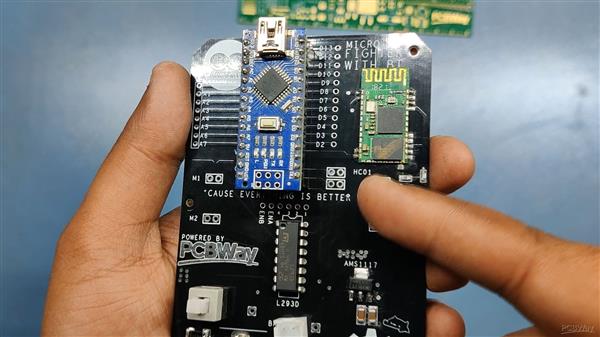
我準(zhǔn)備了一個簡單的設(shè)置,其中包括一個 Arduino Nano 與 L293D 電機驅(qū)動器 IC 連接在正確的配置中,HC01 也與 Arduino Nano 連接。
我在此設(shè)置中使用了 12V 2.6A 電池,不建議直接使用 Arduino 的 VIN 端口添加 12V,因此我添加了 AMS1117 以將此 12V 降壓為 3.3V,以便 Arduino 和 HC01 運行而不會出現(xiàn)任何問題。
?
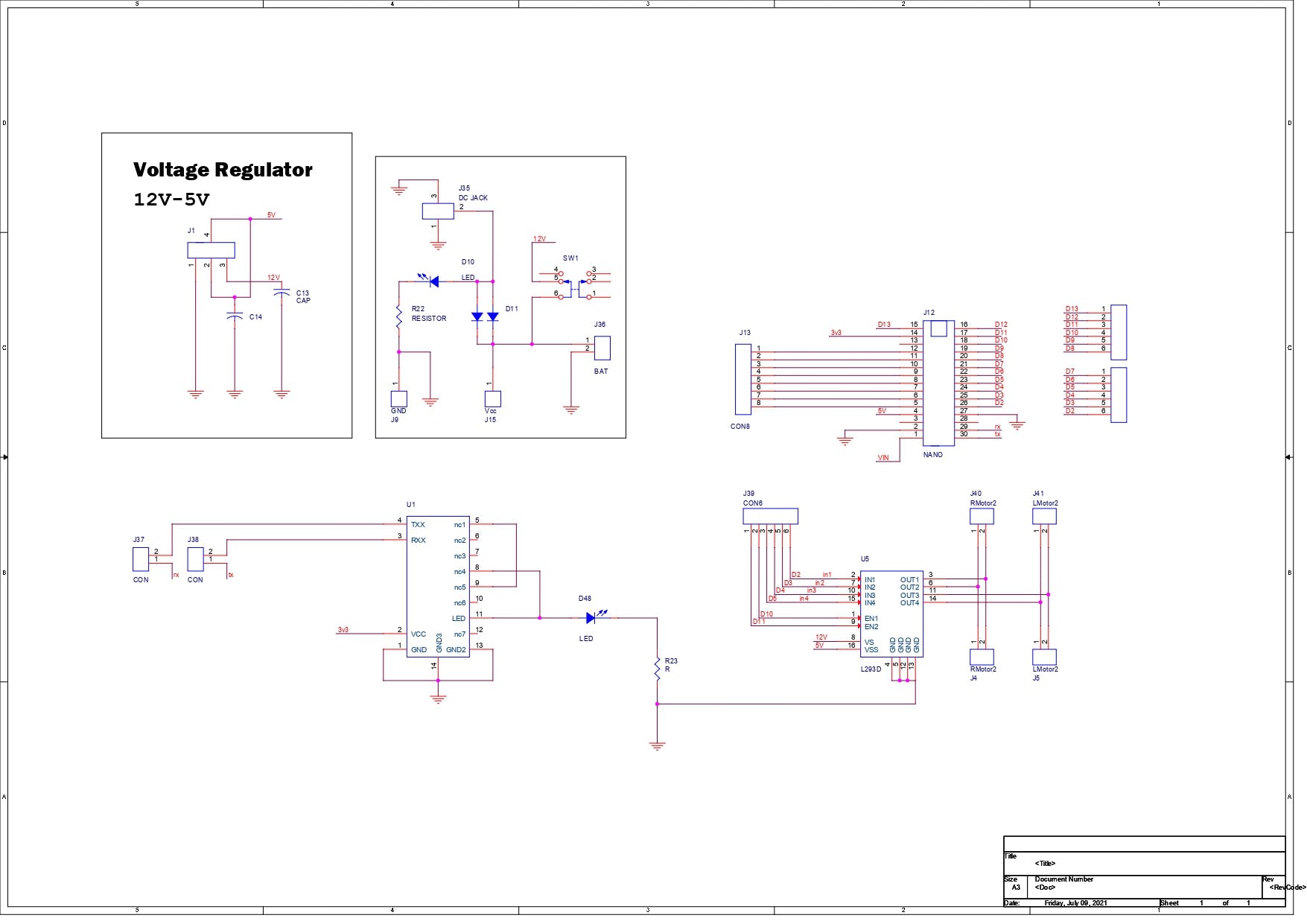
這是我準(zhǔn)備的示意圖!
?
完成此原理圖后,我導(dǎo)入其網(wǎng)表并將其轉(zhuǎn)換為 PCB 設(shè)計。
至于PCB Outline,我使用了fusion360 Model的參考尺寸,然后根據(jù)它制作PCB。
我導(dǎo)出了 Gerber 數(shù)據(jù),然后將其發(fā)送到 PCBWay 以獲取樣本。
?
PCBWAY評論
?
?
將 PCB 送去制造后,只用了 7 天就可以送達(dá)。
我收到的 PCB 和預(yù)期的一樣好!
PCBWay你們搖滾!
查看 PCBWay 以更低的成本獲得出色的 PCB 服務(wù)!
?
筆記-
?
?
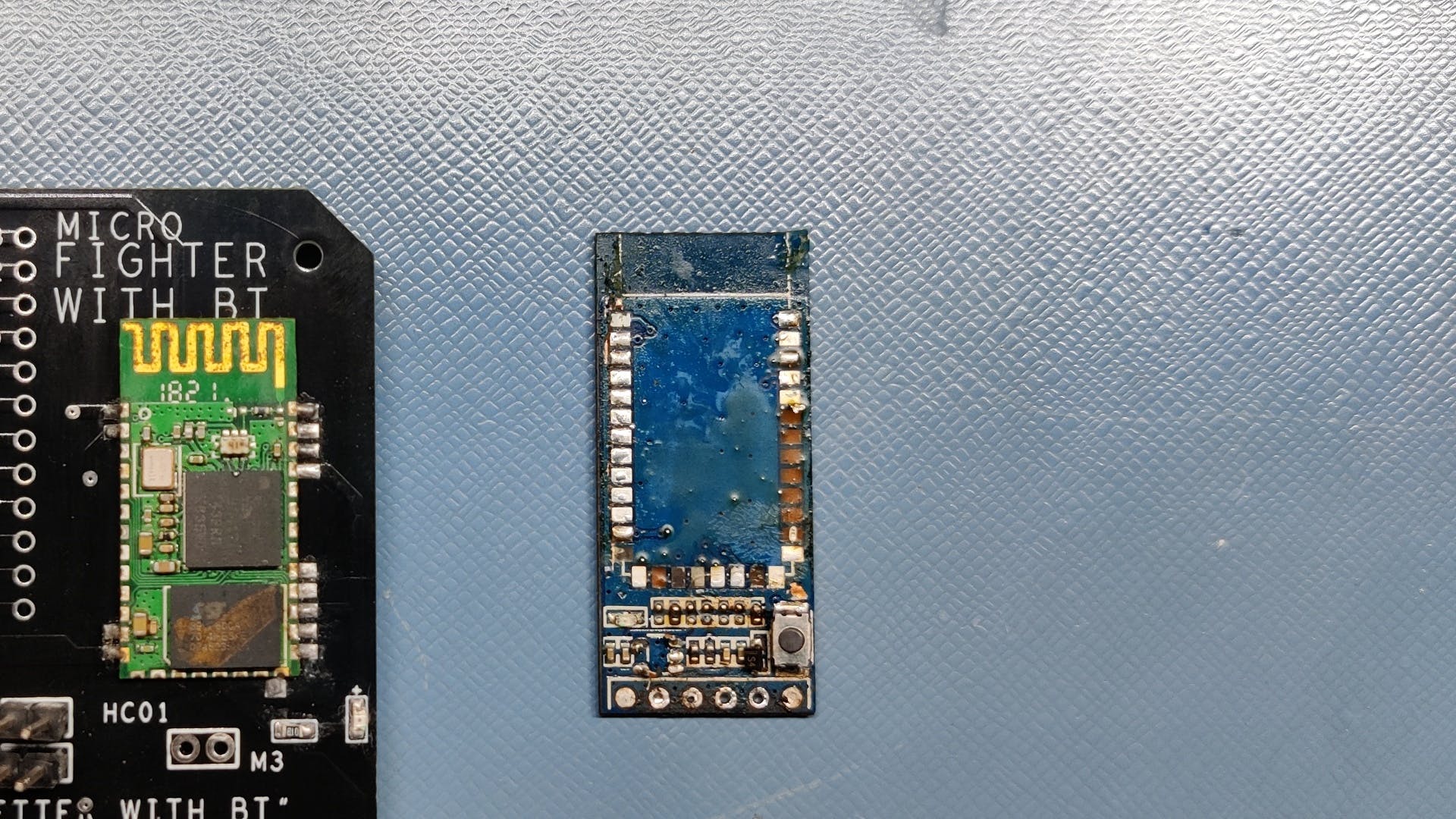
在開始組裝過程之前,這里有一個簡單的事實。我正在使用一個很難找到的 HC01 模塊,你可以很容易地在互聯(lián)網(wǎng)上找到它的分線板,但這些模塊并不容易獲得。
此外,它們的成本很高,所以我所做的是,我拿了一個 HC05 模塊并將其放在我的回流焊爐上,然后從分線板上取下 HC01 模塊。
?
PCB組裝
?
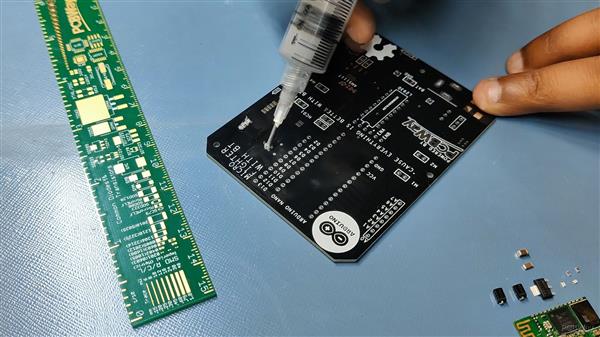
收到 PCB 后,剩下要做的就是在每個元件焊盤上涂抹焊膏。
?
1. 錫膏分配
?
?
我使用了普通的 Sn-Pb 焊膏,其熔化溫度為 140 至 270 °C
錫膏點膠方法比較簡單,我們在每個元件焊盤上一點一點地涂抹少量錫膏,這需要時間。
添加錫膏后,我們需要做“PICK and Place Process”
?
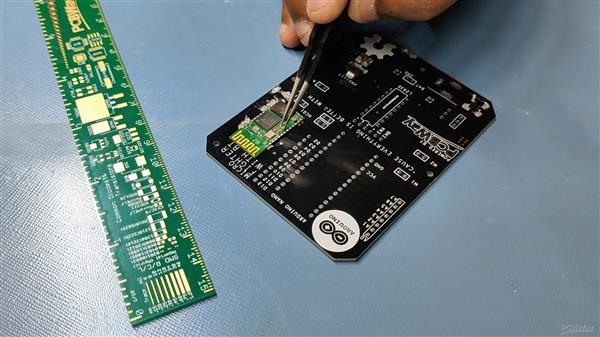
2. 拾取和放置過程
?
?
然后,我使用 ESD 鑷子仔細(xì)挑選每個組件并將其一個一個放置在指定的位置,這需要大約 3 分鐘的時間,但最終結(jié)果是一個完美的 PCB,所有組件都以正確的方向放置在它們的位置。
?
3. 熱板回流
?

?
在“PICK and Place Process”之后,我小心翼翼地將整個電路板抬起并放在我的 DIY SMT Hotplate 上,它也是自制的,就像這個項目一樣。
幾分鐘后,當(dāng)熱板達(dá)到焊膏熔化溫度時,所有組件都將通過此熱回流工藝焊接。
?
4. THT 組件
?
?
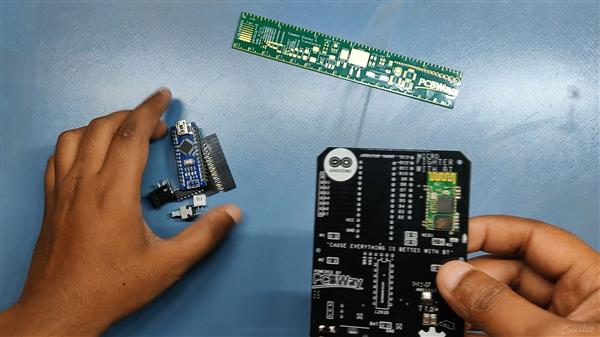
現(xiàn)在我們必須添加 THT 組件,即 Header 引腳、DC Jack、L293D IC 和電池 JST 連接器。
我只是用普通的烙鐵來完成這項工作。
最后,我們將 Arduino Nano 放在頭針上。
?
?
?
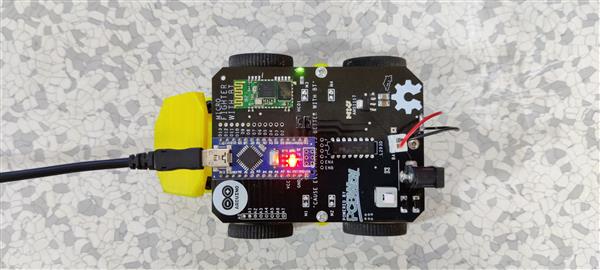
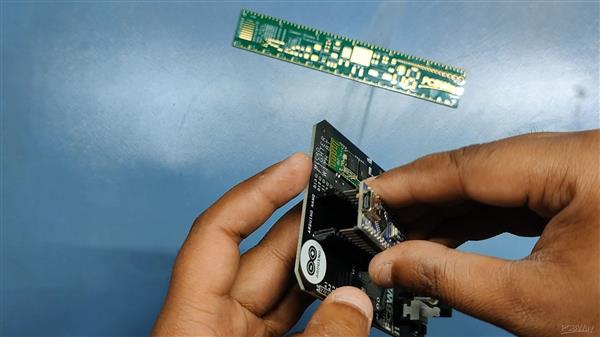
正如您在此處看到的,我在 PCB 上添加了跳線引腳,它們與 TX 和 RX 串聯(lián)。
你看,如果我們直接在 PCB 上添加帶有 HC01 的 Arduino 的 RX 和 TX,而沒有任何分線點,我們將因為 UART 錯誤而無法對 Arduino nano 進行編程。
?
我已經(jīng)在 PCB 上添加了這兩個插頭引腳,因此我可以將它們短路,通過這個 HC01 將與 Arduino Nano 通信,當(dāng)我們必須對 Arduino Nano 進行編程時,我們只需從這些插頭引腳上移除兩個跳線。
您也可以移除 Arduino Nano 并使用草圖對其進行編程,然后將其放回 PCB 上,這種方法可行,但對我來說工作量太大,所以我更喜歡使用接頭引腳。
無論如何,在這樣做之后,我們的 PCB 終于準(zhǔn)備好了。但我們?nèi)匀恍枰獧z查電路是否正常工作。
?
測試電路!
?
?
?

?

?
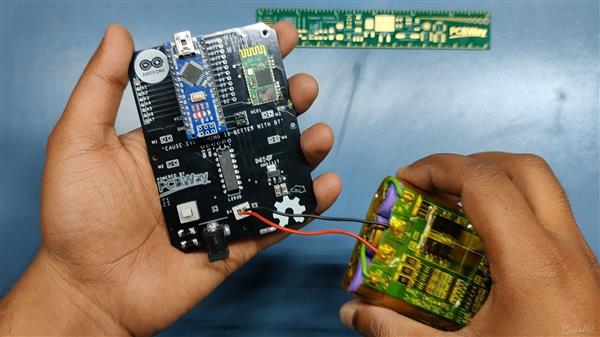
為了測試這塊板,我基本上會使用兩件事,首先,我將使用這個電池,它是一個 12V 的鋰離子電池組,我有一個 BMS,所以我們不必?fù)?dān)心它的很多相關(guān)的事情電池保護。
- 我們首先將電池添加到我們的 PCB 上,并以正確的極性連接 JST。
- 然后我們打開開關(guān),我們的 Arduino nano 和 HC01 正在工作。
- HC05 LED 閃爍并且 LED 在 Arduino nano 中發(fā)光,這意味著這兩個模塊都可以正常工作。
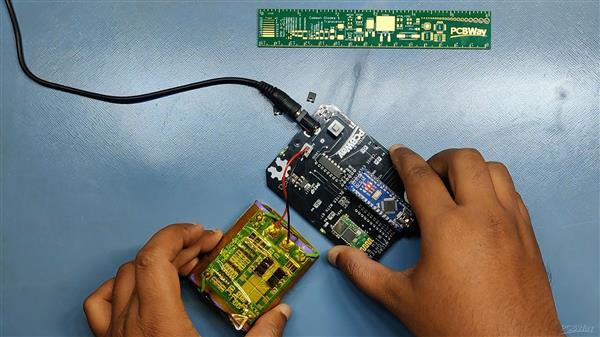
- 接下來,我在 DC Barrel 插孔上添加了一個 12V 5A SMPS,用于為車載電池組充電。DC 插孔一側(cè)的 LED 發(fā)光,這意味著一切都很好而且花花公子。
- 現(xiàn)在,我終于拿出手機和HC01模塊配對了。
- 然后我在手機中打開了一個藍(lán)牙終端應(yīng)用程序并連接了HC01。連接后,LED 停止其頻繁的閃爍序列,這表明模塊現(xiàn)在已與設(shè)備連接。
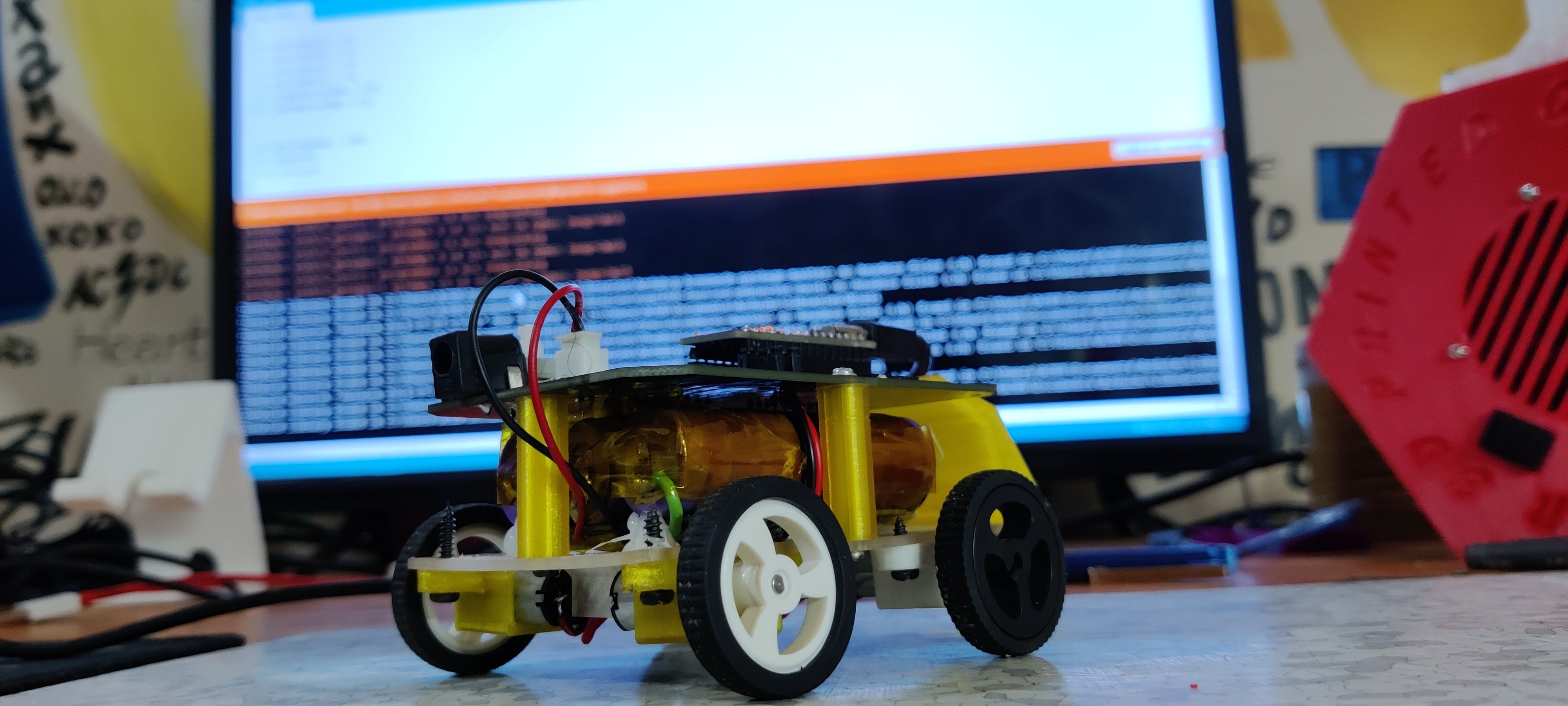
所以我們的 PCB 現(xiàn)在已經(jīng)通過了它的測試過程,現(xiàn)在我們將準(zhǔn)備 3D 打印的基體,它將容納 PCB 和其他東西。
?
3D 打印零件和車身裝配
?
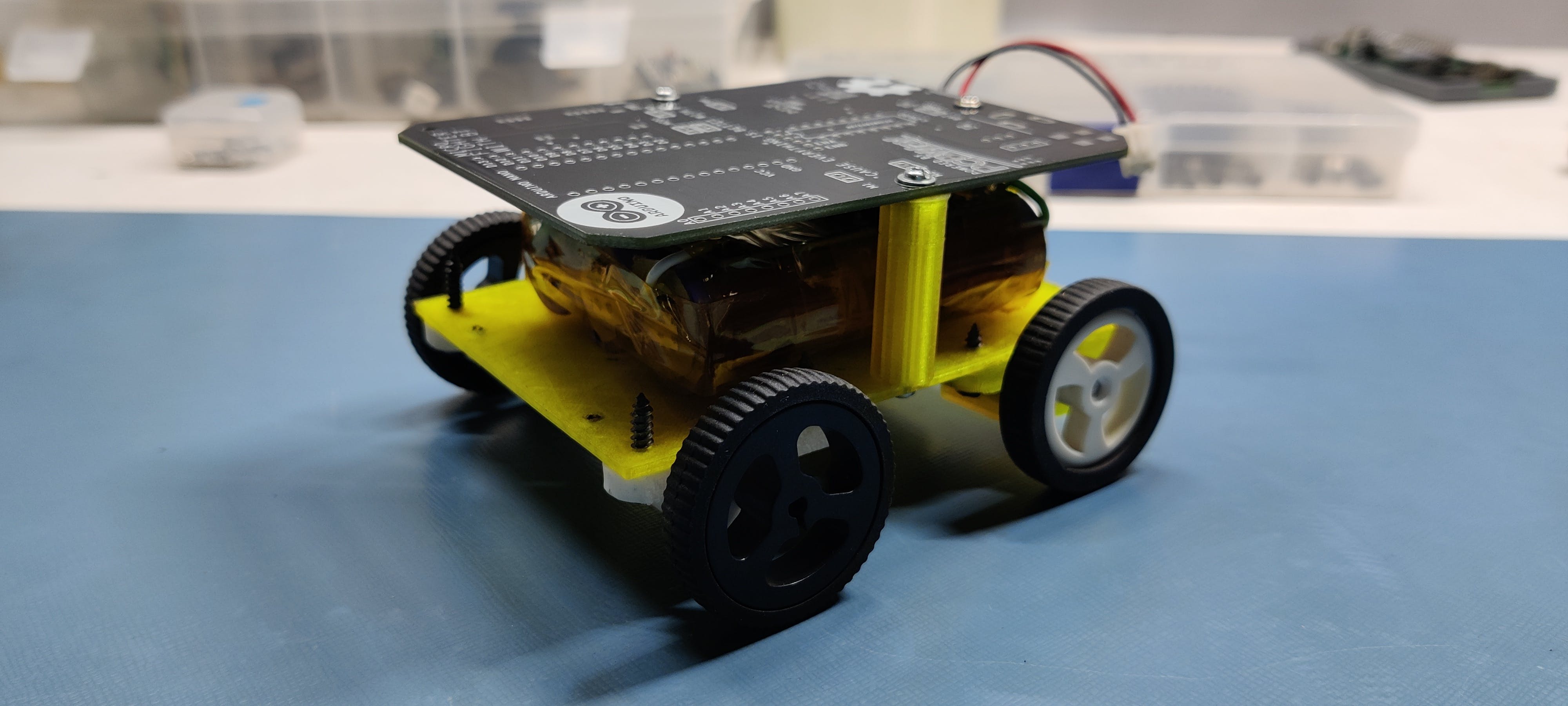
?
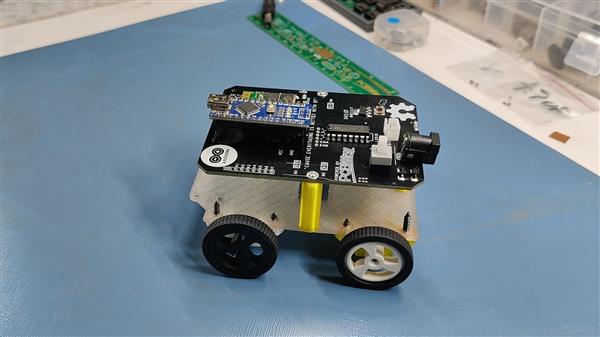
這是這個下部底座,它從底部固定著四個帶有電機安裝支架的直流電機。
然后三個支柱在對面,這些支柱將用于將 PCB 和 Base 安裝在一起。
在 PCB 和 Base 之間,放置了一個鋰離子電池,所以它是一個緊湊的設(shè)置,可以很好地將所有東西結(jié)合在一起。
?
?
至于這些 3D 打印部件的材料,我選擇透明 PLA 和透明黃色 PLA,看起來有點像金色,但不是。
?
?
將所有內(nèi)容加在一起后,我在中間部分添加了電池并將其端子與 JST 連接器連接。
然后我按此順序?qū)㈦娋€添加到電機和 PCB
?
?
代碼
?
motorLpin1 = ;
motorLpin2 = ;
motorRpin1 = ;
motorRpin2 = ;
rightMotorENA = ;
leftMotorENB = ;
電機速度 = ;
轉(zhuǎn)= ;
{
序列號.開始();
Serial.flush();
pinMode(motorLpin1,輸出);
pinMode(motorLpin2,輸出);
pinMode(電機Rpin1,輸出);
pinMode(電機Rpin2,輸出);
pinMode(右MotorENA,輸出);
pinMode(左MotorENB,輸出);
}
{
字符串輸入= ;
(Serial.available()){
輸入+=()Serial.read();
延遲();
}
(輸入== ){
馬達(dá)停止();
}
(輸入== ){
電機前鋒();
}
(輸入== ){
電機后退();
}
(input.indexOf( )> ){
左電機();
}
(input.indexOf( )> ){
馬達(dá)右();
}
(input.indexOf( )> ){
正方形();
}
}
{
數(shù)字寫入(motorLpin1,HIGH);
數(shù)字寫入(motorLpin2,LOW);
數(shù)字寫入(motorRpin1,HIGH);
數(shù)字寫入(電機Rpin2,低);
模擬寫入(左MotorENB,);
模擬寫入(右MotorENA,);
}
{
數(shù)字寫入(motorLpin1,LOW);
數(shù)字寫入(motorLpin2,HIGH);
數(shù)字寫入(motorRpin1,LOW);
數(shù)字寫入(motorRpin2,HIGH);
模擬寫入(左MotorENB,);
模擬寫入(右MotorENA,);
}
{
數(shù)字寫入(motorLpin1,HIGH);
數(shù)字寫入(motorLpin2,LOW);
數(shù)字寫入(motorRpin1,LOW);
數(shù)字寫入(motorRpin2,HIGH);
類比寫入(左MotorENB,);
類比寫入(右MotorENA,);
}
{
數(shù)字寫入(motorLpin1,LOW);
數(shù)字寫入(motorLpin2,HIGH);
數(shù)字寫入(motorRpin1,HIGH);
數(shù)字寫入(電機Rpin2,低);
類比寫入(左MotorENB,);
類比寫入(右MotorENA,);
}
{
數(shù)字寫入(motorLpin1,LOW);
數(shù)字寫入(motorLpin2,LOW);
數(shù)字寫入(motorRpin1,LOW);
數(shù)字寫入(電機Rpin2,低);
digitalWrite(leftMotorENB,LOW);
digitalWrite(右MotorENA,LOW);
}
{
}
?
上傳過程非常簡單,我們首先從 HC01 Header 引腳上移除跳線,然后將 Arduino nano 連接到我們的計算機并使用 Arduino IDE 刷新 Bot,這幾乎就是上傳過程!
代碼非常簡單,您可以根據(jù)需要或要求進行更改。
(刷機過程后別忘了加跳線回原位)
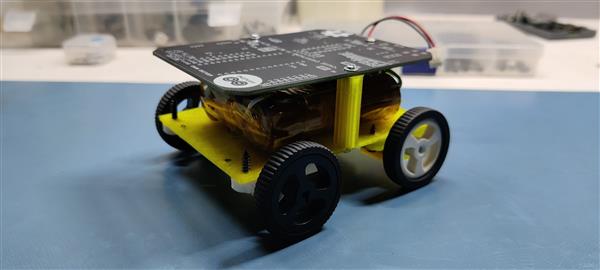
我們的 MicroBot 已準(zhǔn)備好進行首次運行!
?
應(yīng)用程序
?
?
現(xiàn)在,以前的版本是一個 blynk 應(yīng)用程序的控制器,但我在這個項目中沒有使用 ESP32 或 ESP8266。我們需要一個藍(lán)牙終端應(yīng)用程序。
我正在使用這個藍(lán)牙控制器應(yīng)用程序,您可以從 google play 商店下載。?https://play.google.com/store/apps/details?id=com.giumig.apps.bluetoothserialmonitor
?
打開這個應(yīng)用程序并將您的 HC01 與它配對,然后打開它的控制器模式并為按鈕分配它們的值,在我們的例子中就是這些。
- TL 左轉(zhuǎn)
- TR 右轉(zhuǎn)
- F代表前進
- R 反向
- S 停止
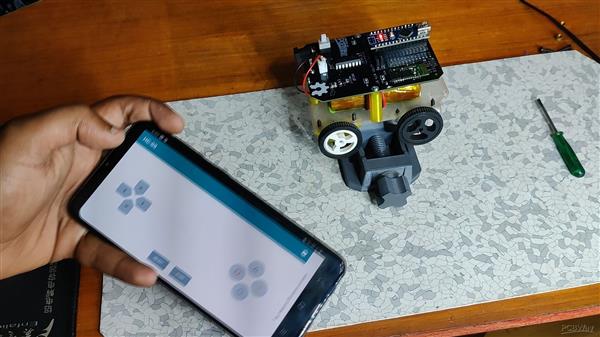
現(xiàn)在我們只需按任意按鈕來控制這個機器人!
?
?
?
結(jié)果/測試運行
?
?
結(jié)論與改進
?
?
如您所見,我們的機器人正在工作!它非常快,這是我的目標(biāo),讓它盡可能快和堅固。
?
?
現(xiàn)在,這個設(shè)置就像一個開發(fā)平臺,一個微型戰(zhàn)斗機平臺。
這里的想法是制作多個這些根并讓它們進行戰(zhàn)斗和其他事情。此外,我們還必須在這些機器人中添加一些噱頭,例如普通武器護盾盔甲等。
?
這個項目是完全開源的,所以如果這里有人想要制作其中一個機器人,那么所有的文件都附上了。
如果您需要更多幫助,請評論/DM。
?
如果 Project 很有趣,那就按贊按鈕吧!
?
感謝 PCBWAY 為本項目提供 PCB,
查看 PCBWay 以更低的價格獲得出色的 PCB 服務(wù)。
我會在下一個項目中見到你們!
?
代碼
|
?
|
int motorLpin1 = 2; |
|
?
|
int motorLpin2 = 3; |
|
?
|
int motorRpin1 = 4; |
|
?
|
int motorRpin2 = 5; |
|
?
|
int rightMotorENA = 10; |
|
?
|
int leftMotorENB = 11; |
|
?
|
?
|
|
?
|
?
|
|
?
|
int motorSpeed = 200; |
|
?
|
int turn=50; |
|
?
|
void setup() |
|
?
|
{ |
|
?
|
Serial.begin(9600); |
|
?
|
Serial.flush(); |
|
?
|
pinMode(motorLpin1,OUTPUT); |
|
?
|
pinMode(motorLpin2,OUTPUT); |
|
?
|
pinMode(motorRpin1,OUTPUT); |
|
?
|
pinMode(motorRpin2,OUTPUT); |
|
?
|
pinMode(rightMotorENA,OUTPUT); |
|
?
|
pinMode(leftMotorENB,OUTPUT); |
|
?
|
?
|
|
?
|
?
|
|
?
|
} |
|
?
|
?
|
|
?
|
void loop(){ |
|
?
|
String input=""; |
|
?
|
while(Serial.available()){ |
|
?
|
input+=(char)Serial.read(); |
|
?
|
delay(5); |
|
?
|
} |
|
?
|
?
|
|
?
|
if(input=="S"){ |
|
?
|
MotorStop(); |
|
?
|
} |
|
?
|
else if(input=="F"){ |
|
?
|
MotorForward(); |
|
?
|
} |
|
?
|
else if(input=="R"){ |
|
?
|
MotorBackward(); |
|
?
|
} |
|
?
|
else if(input.indexOf("TR")>-1){ |
|
?
|
MotorLeft(); |
|
?
|
} |
|
?
|
else if(input.indexOf("TL")>-1){ |
|
?
|
MotorRight(); |
|
?
|
} |
|
?
|
?
|
|
?
|
else if(input.indexOf("SQ")>-1){ |
|
?
|
SQUARE(); |
|
?
|
} |
|
?
|
?
|
|
?
|
?
|
|
?
|
} |
|
?
|
?
|
|
?
|
void MotorForward(void) |
|
?
|
{ |
|
?
|
digitalWrite(motorLpin1,HIGH); |
|
?
|
digitalWrite(motorLpin2,LOW); |
|
?
|
digitalWrite(motorRpin1,HIGH); |
|
?
|
digitalWrite(motorRpin2,LOW); |
|
?
|
analogWrite(leftMotorENB,200); |
|
?
|
analogWrite(rightMotorENA,200); |
|
?
|
} |
|
?
|
?
|
|
?
|
void MotorBackward(void) |
|
?
|
{ |
|
?
|
?
|
|
?
|
digitalWrite(motorLpin1,LOW); |
|
?
|
digitalWrite(motorLpin2,HIGH); |
|
?
|
digitalWrite(motorRpin1,LOW); |
|
?
|
digitalWrite(motorRpin2,HIGH); |
|
?
|
analogWrite(leftMotorENB,200); |
|
?
|
analogWrite(rightMotorENA,200); |
|
?
|
} |
|
?
|
void MotorLeft(void) |
|
?
|
{ |
|
?
|
digitalWrite(motorLpin1,HIGH); |
|
?
|
digitalWrite(motorLpin2,LOW); |
|
?
|
digitalWrite(motorRpin1,LOW); |
|
?
|
digitalWrite(motorRpin2,HIGH); |
|
?
|
analogWrite(leftMotorENB,50); |
|
?
|
analogWrite(rightMotorENA,50); |
|
?
|
} |
|
?
|
void MotorRight(void) |
|
?
|
{ |
|
?
|
?
|
|
?
|
digitalWrite(motorLpin1,LOW); |
|
?
|
digitalWrite(motorLpin2,HIGH); |
|
?
|
digitalWrite(motorRpin1,HIGH); |
|
?
|
digitalWrite(motorRpin2,LOW); |
|
?
|
analogWrite(leftMotorENB,50); |
|
?
|
analogWrite(rightMotorENA,50); |
|
?
|
} |
|
?
|
void MotorStop(void) |
|
?
|
{ |
|
?
|
?
|
|
?
|
digitalWrite(motorLpin1,LOW); |
|
?
|
digitalWrite(motorLpin2,LOW); |
|
?
|
digitalWrite(motorRpin1,LOW); |
|
?
|
digitalWrite(motorRpin2,LOW); |
|
?
|
digitalWrite(leftMotorENB,LOW); |
|
?
|
digitalWrite(rightMotorENA,LOW); |
|
?
|
} |
|
?
|
?
|
|
?
|
void SQUARE(void) |
|
?
|
{ |
|
?
|
?
|
|
?
|
?
|
|
?
|
} |
- 帶Arduino和藍(lán)牙的智能咖啡機
- 輕型戰(zhàn)斗機開源設(shè)計
- 高通CSR 藍(lán)牙PIF天線和蛇形PCB天線設(shè)計指導(dǎo)
- 杰力科創(chuàng)三鍵帶DAC輸出藍(lán)牙音箱DLT8M04S 5次下載
- 華秋PCB-不規(guī)則拼板設(shè)計 0次下載
- 基于單片機的PCB設(shè)計源代碼下載 45次下載
- PCB設(shè)計:藍(lán)牙小鍵盤資料下載
- PCB設(shè)計:帶重力傳感器的藍(lán)牙音箱資料下載
- 4層藍(lán)牙產(chǎn)品PCB設(shè)計素材 0次下載
- 如何使用HC-05藍(lán)牙模塊進行單片機通訊
- 多型號戰(zhàn)斗機角速率陀螺組件綜合檢測系統(tǒng)設(shè)計 0次下載
- 微型四軸PCB結(jié)構(gòu)圖 0次下載
- 藍(lán)牙對講手機APP藍(lán)牙對講對講機PTT對講方案 61次下載
- BOT項目公司的十大特質(zhì)
- 空戰(zhàn)指揮系統(tǒng)戰(zhàn)斗機引導(dǎo)動態(tài)決策模型
- 寬禁帶器件和仿真環(huán)境介紹 1582次閱讀
- 智能傳感器與藍(lán)牙連接之間的問題怎樣來解決 3615次閱讀
- dfrobot帶接口金屬齒輪減速電機 (50:1)簡介 1231次閱讀
- dfrobot帶接口金屬齒輪減速電機 (30:1)簡介 1154次閱讀
- dfrobot帶接口金屬齒輪減速電機 (75:1)簡介 1311次閱讀
- dfrobot雙路15A大功率電機驅(qū)動介紹 1804次閱讀
- 什么是單片機_單片機的概念 3.6w次閱讀
- AR-HUD中陽光負(fù)載建模的重要性 2840次閱讀
- 美軍用3D打印制造戰(zhàn)斗機起落架艙門上的小部件 4080次閱讀
- 探討下一代戰(zhàn)斗機雷達(dá)隱身技術(shù)的研究和發(fā)展 4620次閱讀
- 戰(zhàn)斗機器人或?qū)⒆哌M現(xiàn)實世界 3182次閱讀
- 一文教你如何用單片機系統(tǒng)制作微型打印機 5504次閱讀
- “導(dǎo)游Bot”在模擬的紐約市中導(dǎo)航定位,使用自然語言跟“游客Bot”交流 2348次閱讀
- led燈帶基礎(chǔ)知識及安裝 3.2w次閱讀
- 微型投影機技術(shù)類型分析與對比 1411次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 2PIC12F629/675 數(shù)據(jù)手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 3PIC16F716 數(shù)據(jù)手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 4dsPIC33EDV64MC205電機控制開發(fā)板用戶指南
- 5.78MB | 8次下載 | 免費
- 5STC15系列常用寄存器匯總免費下載
- 1.60 MB | 7次下載 | 5 積分
- 6模擬電路仿真實現(xiàn)
- 2.94MB | 4次下載 | 免費
- 7PCB圖繪制實例操作
- 2.92MB | 2次下載 | 免費
- 8零死角玩轉(zhuǎn)STM32F103—指南者
- 26.78 MB | 1次下載 | 1 積分
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 452次下載 | 免費
- 2免費開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 141次下載 | 1 積分
- 3基于STM32單片機智能手環(huán)心率計步器體溫顯示設(shè)計
- 0.10 MB | 137次下載 | 免費
- 4A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 5PIC12F629/675 數(shù)據(jù)手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 6如何正確測試電源的紋波
- 0.36 MB | 19次下載 | 免費
- 7PIC16F716 數(shù)據(jù)手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 8Q/SQR E8-4-2024乘用車電子電器零部件及子系統(tǒng)EMC試驗方法及要求
- 1.97 MB | 8次下載 | 10 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學(xué)會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論