 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
今天,你幾乎不會讓任何人感到驚訝,因為你的手機配備了攝像頭、無線小工具和其他技術進步。多虧了 Arduino 平臺,數百萬人發現了電子和編程的美妙世界。關于如何通過藍牙在手機和 Arduino 之間交換數據的 100、500 條指令被寫...我在說什么?是的。我想通過藍牙在 Android 上的手機和 Arduino UNO 之間交換數據 100、501 次。但我想傳輸的不僅僅是一組字符和數字,而是圖片。
有人會說這是不可能的,Arduino 速度太慢,無法快速處理大量數據。他將是絕對正確的。如果對 Arduino 有一點幫助 - 將所有“艱苦”的工作轉移到其他設備的肩上呢?并且有這樣的設備!
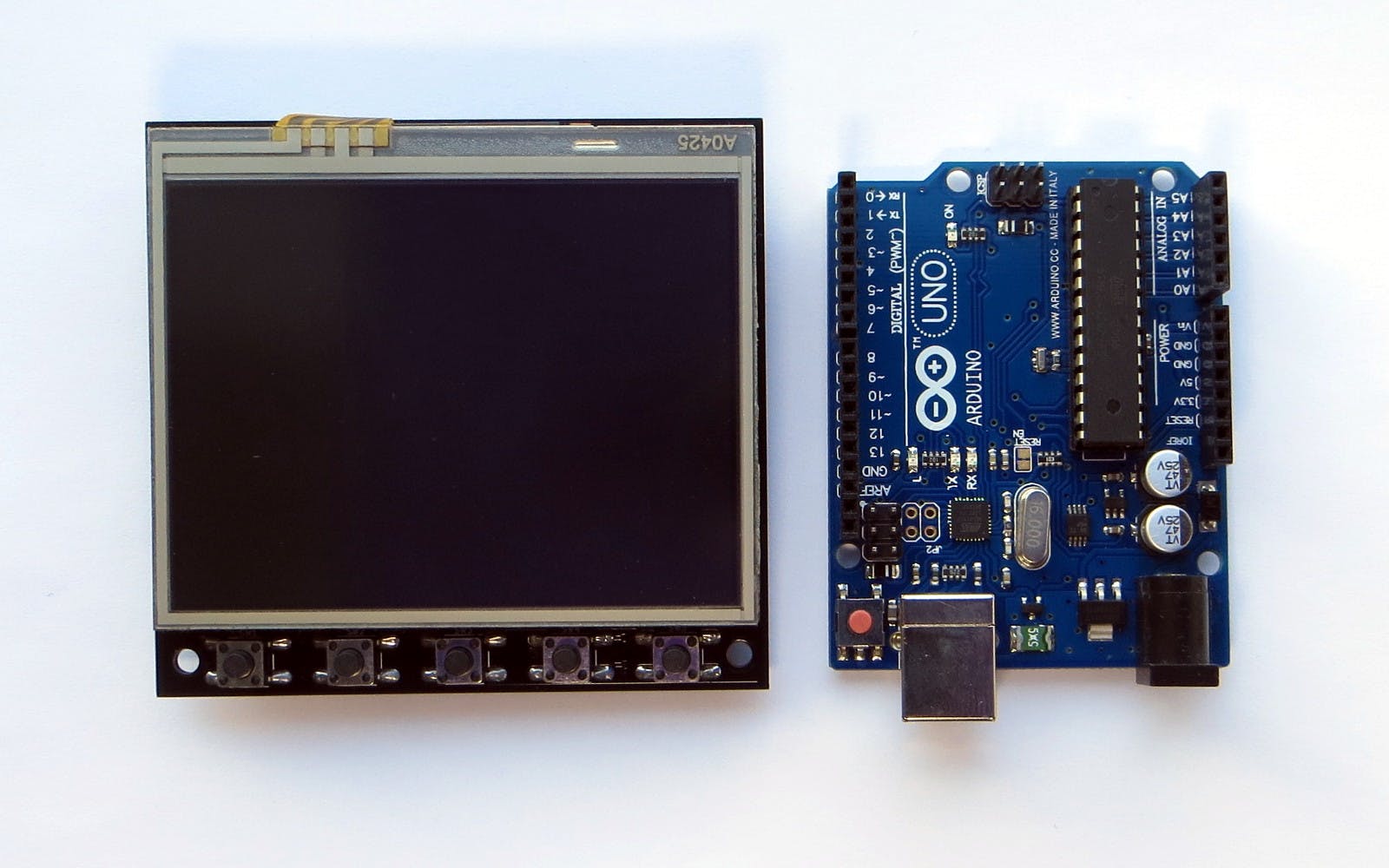
這是 Arduino 獨特的 TFT 屏蔽。有關此徽標的信息在以下文章中:文章 1 ,文章 2在本教程中,我將演示如何通過藍牙連接 Arduino 和 Android 手機,從 Arduino UNO 上的 OV7670 攝像頭獲取照片并將其傳輸到 Android 手機。然后,相反,將圖片(來自相機的圖像)從 Android 手機傳輸到 Arduino UNO 并顯示在獨特的 TFT 屏蔽的屏幕上。
為 Android 手機編寫了一個特殊的應用程序。
TFT屏蔽的簡要特點:
- 尺寸 3.5 英寸對角線,
- 分辨率 320x240,
- 顏色數 65536(16 位),
- 5個按鈕,
- 用于連接 micro SD 卡的插槽,
- 4 針 (2.54 mm) 連接器,用于連接藍牙模塊 HC-05 (-06)、ESP8286 WiFi 模塊。
- 用于相機 (OV7670) 的 20 針 (2.54 mm) 連接器。
所需組件列表

硬件:
- 安卓手機。
注意:必須(!)使用 6-12 伏電源適配器來操作 TFT 屏蔽,因為 USB 的 500 mA 的最大電流不足以正常操作。
軟件:
準備中
軟件
所有演示草圖都是在 Arduino IDE 環境中編寫的,因此一開始需要安裝 Arduino IDE - https://www.arduino.cc/en/main/software。然后你需要為 TFT shield 安裝一個庫 - github.com/YATFT/YATFT (下載該庫并解壓到 Arduino IDE 目錄下的“libraries”文件夾中)。
安裝 Arduino IDE 后,您必須對 Arduino UNO 板進行編程。為簡單起見,我建議單獨刷機,不帶 TFT 屏蔽。為了這:
- 將 USB 線連接到 Arduino UNO 板;
- 在電腦上運行 Arduino IDE;
- 選擇Arduino UNO所連接的對應端口;
- 下載ArduinoBluetoothCamera.ino演示草圖(和文件ov7670_regs.h用于相機初始化);
- 單擊按鈕上傳。
如果 Arduino UNO 板編程成功,您可以繼續下一步。
ArduinoBluetoothCamera.ino草圖:
/**********************************************************************
* SOFTWARE AND DOCUMENTATION ARE PROVIDED "AS IS" WITHOUT WARRANTY OF
* ANY KIND, EITHER EXPRESS OR IMPLIED, INCLUDING WITHOUT LIMITATION, ANY
* WARRANTY OF MERCHANTABILITY, TITLE, NON-INFRINGEMENT AND FITNESS FOR A
* PARTICULAR PURPOSE. IN NO EVENT SHALL AUTHOR OR ITS LICENSORS BE
* LIABLE OR OBLIGATED UNDER CONTRACT, NEGLIGENCE, STRICT LIABILITY,
* CONTRIBUTION, BREACH OF WARRANTY, OR OTHER LEGAL EQUITABLE THEORY ANY
* DIRECT OR INDIRECT DAMAGES OR EXPENSES INCLUDING BUT NOT LIMITED TO
* ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE OR CONSEQUENTIAL DAMAGES,
* LOST PROFITS OR LOST DATA, COST OF PROCUREMENT OF SUBSTITUTE GOODS,
* TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES (INCLUDING BUT
* NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
***********************************************************************/
#include
#include
#include
#include
#include "ov7670_regs.h"
JPEG_DECODE jpeg_decode;
YATFT tft(0);
INTRFC ifc;
CAM cam;
CODEC codec;
SRL srl;
#define IMG_SizeX 320
#define IMG_SizeY 240
uint8_t mode = 0;
uint8_t last_mode = 0;
uint8_t start_capt = 0;
uint16_t err;
void setup()
{
// initialize the serial port
Serial.begin(115200);
// initialize the display
tft.begin();
tft.SetColor(BRIGHTRED);
tft.ClearDevice();
}
void loop()
{
// put your main code here, to run repeatedly:
if (Serial.available())
{
uint8_t temp = Serial.read();
switch (temp)
{
case 0x10: // Send single Photo
mode = 1;
start_capt = 1;
if (last_mode != mode && last_mode != 2) {
tft.begin();
tft.SetRGB(); // Switch to RGB mode
cam.CamInit(&OV7670_QVGA[0][0]);
cam.CamVideoPreview(0, 0, 1, true);
codec.JPEGInit();
codec.JPEGSetRegs(IMG_SizeX, IMG_SizeY);
delay(1000);
}
break;
case 0x20: // Continuous send Photo
mode = 2;
start_capt = 2;
if (last_mode != mode && last_mode != 1) {
tft.begin();
tft.SetRGB(); // Switch to RGB mode
cam.CamInit(&OV7670_QVGA[0][0]);
cam.CamVideoPreview(0, 0, 1, true);
codec.JPEGInit();
codec.JPEGSetRegs(IMG_SizeX, IMG_SizeY);
}
break;
case 0x30: // Receive single Photo
mode = 3;
start_capt = 3;
if (last_mode != mode && last_mode != 4) {
tft.begin();
tft.SetYUV(); // Switch to YUV mode
}
break;
case 0x40: // Continuous receive Photo
mode = 4;
start_capt = 4;
if (last_mode != mode && last_mode != 3) {
tft.begin();
tft.SetYUV(); // Switch to YUV mode
}
break;
default:
break;
}
}
if (mode == 1) // Send single Photo
{
if (start_capt == 1)
{
start_capt = 0;
last_mode = mode;
mode = 0;
CamCapture();
}
}
else if (mode == 2) // Continuous send Photo
{
while (1)
{
uint8_t temp = Serial.read();
if (start_capt == 2)
{
start_capt = 0;
}
if (temp == 0x21) // Stop ?
{
start_capt = 0;
last_mode = mode;
mode = 0;
break;
}
if (CamCapture()) continue;
}
}
else if (mode == 3) // Receive single Photo
{
if (start_capt == 3)
{
//Start capture
start_capt = 0;
last_mode = mode;
mode = 0;
Serial.print("!");
srl.JPEGReadFromSerial(&jpeg_decode, // jpeg decode structure
0, // x0 (left)
0, // y0 (top)
GetMaxX()+1, // x1 (right)
GetMaxY()+1, // y1 (bottom)
32000); // max image size
}
}
else if (mode == 4) // Continuous receive Photo
{
uint8_t temp = Serial.read();
while (1)
{
if (start_capt == 4)
{
//Start capture
start_capt = 0;
}
if (temp == 0x41) // Stop ?
{
start_capt = 0;
last_mode = mode;
mode = 0;
break;
}
Serial.print("!");
srl.JPEGReadFromSerial(&jpeg_decode, // jpeg decode structure
0, // x0 (left)
0, // y0 (top)
GetMaxX()+1, // x1 (right)
GetMaxY()+1, // y1 (bottom)
32000); // max image size
}
}
}
uint8_t CamCapture(void)
{
uint8_t temp = 0xff, temp_last = 0;
bool is_header = false;
uint32_t length = 0;
length = codec.JPEGStart();
uint32_t en_jpeg_address = ifc.rdReg32(0x414)<<2;
int k = 0;
if ((length >= 0x5FFFF) | (length == 0))
{
start_capt = 2;
return 1;
}
temp = ifc.GetMem(en_jpeg_address+k);
k++;
length --;
while ( length-- )
{
temp_last = temp;
temp = ifc.GetMem(en_jpeg_address+k);
k++;
if (is_header == true)
{
Serial.write(temp);
}
else if ((temp == 0xD8) & (temp_last == 0xFF))
{
is_header = true;
Serial.write(temp_last);
Serial.write(temp);
}
if ( (temp == 0xD9) && (temp_last == 0xFF) ) //If find the end ,break while,
break;
}
is_header = false;
return 0;
}
OV7670_regs.h:
#ifndef OV7670_REGS_H
#define OV7670_REGS_H
const uint8_t OV7670_VGA[][2] PROGMEM =
{
{ 1, 0x42}, // Size of byte, Address (ID)
{ 640/16, 480/16}, // Size X, Size Y
{0b01000010, 0b00000100}, // Reset_Enable_N, 7|6|5|4|3|Vsync Invert|Hsync Invert|0
{0x3a, 0x0C}, {0x40, 0xC0}, {0x12, 0x00}, {0x0c, 0x00},
{0x3e, 0x00}, {0x70, 0x3A}, {0x71, 0x35}, {0x72, 0x11},
{0x73, 0xF0}, {0xa2, 0x02}, {0x11, 0x80}, {0x7a, 0x18},
{0x7b, 0x02}, {0x7c, 0x07}, {0x7d, 0x1F}, {0x7e, 0x49},
{0x7f, 0x5A}, {0x80, 0x6A}, {0x81, 0x79}, {0x82, 0x87},
{0x83, 0x94}, {0x84, 0x9F}, {0x85, 0xAF}, {0x86, 0xBB},
{0x87, 0xCF}, {0x88, 0xEE}, {0x89, 0xEE}, {0x13, 0xE0},
{0x00, 0x00}, {0x10, 0x00}, {0x0d, 0x00}, {0x24, 0x98},
{0x25, 0x63}, {0x26, 0xD3}, {0x2a, 0x00}, {0x2b, 0x00},
{0x2d, 0x00}, {0x13, 0xe5}, {0x13, 0xe7}, {0x1e, 0x30},
{0x74, 0x60}, {0x01, 0x80}, {0x02, 0x80}, {0x15, 0x10},
{0x4f, 0x40}, {0x50, 0x34}, {0x51, 0x0C}, {0x52, 0x17},
{0x53, 0x29}, {0x54, 0x40}, {0x57, 0x80}, {0x58, 0x1e},
{0x41, 0x10}, {0x75, 0x60}, {0x76, 0x50}, {0x77, 0x48},
{0x3d, 0x92}, {0x3b, 0x00}, {0x04, 0x00}, {0xff, 0xff},
};
const uint8_t OV7670_QVGA[][2] PROGMEM =
{
{ 1, 0x42}, // Size of byte, Address (ID)
{ 320/16, 240/16}, // Size X, Size Y
{0b01000010, 0b00000100}, // Reset_Enable_N, 7|6|5|4|3|Vsync Invert|Hsync Invert|0
{0x3a, 0x0C}, {0x40, 0xC0}, {0x12, 0x10}, {0x0c, 0x00},
{0x3e, 0x00}, {0x70, 0x3A}, {0x71, 0x35}, {0x72, 0x11},
{0x73, 0xF0}, {0xa2, 0x02}, {0x11, 0x80}, {0x7a, 0x18},
{0x7b, 0x02}, {0x7c, 0x07}, {0x7d, 0x1F}, {0x7e, 0x49},
{0x7f, 0x5A}, {0x80, 0x6A}, {0x81, 0x79}, {0x82, 0x87},
{0x83, 0x94}, {0x84, 0x9F}, {0x85, 0xAF}, {0x86, 0xBB},
{0x87, 0xCF}, {0x88, 0xEE}, {0x89, 0xEE}, {0x13, 0xE0},
{0x00, 0x00}, {0x10, 0x00}, {0x0d, 0x00}, {0x24, 0x98},
{0x25, 0x63}, {0x26, 0xD3}, {0x2a, 0x00}, {0x2b, 0x00},
{0x2d, 0x00}, {0x13, 0xe5}, {0x13, 0xe7}, {0x1e, 0x30},
{0x74, 0x60}, {0x01, 0x80}, {0x02, 0x80}, {0x15, 0x10},
{0x4f, 0x40}, {0x50, 0x34}, {0x51, 0x0C}, {0x52, 0x17},
{0x53, 0x29}, {0x54, 0x40}, {0x57, 0x80}, {0x58, 0x1e},
{0x41, 0x10}, {0x75, 0x60}, {0x76, 0x50}, {0x77, 0x48},
{0x3d, 0x92}, {0x3b, 0x00}, {0x04, 0x00}, {0xff, 0xff},
};
#endif
安卓
在 Android 手機上,您需要安裝ArduinoTFT.apk。允許應用使用藍牙和相機。
2020 年 5 月 26 日更新!
我添加了 ArduinoTFT.apk 的源代碼。原樣!下載ArduinoTFT.zip.h
,重命名為ArduinoTFT.zip 并解壓。享受!
2020 年 7 月 25 日更新!
“嗨,我遇到了同樣的問題,Android 應用程序無法正常工作。授權應用程序訪問智能手機相機后解決。就是這樣。再見”(c)
藍牙模塊
需要在藍牙模塊中設置匯率為115200(命令“AT+UART=115200, 0, 0”)。這是 Arduino UNO 管理接收和處理數據的最佳速度。(理論上可以提高速度,優化數據接收和處理,但這需要更大的RAM)。關于如何設置匯率的更詳細說明可以在網上找到,例如,這里:https:/ /www.instructables.com/id/Communication-Bluetooth-Module-With-HC-05-HC-06/ 。
(!)請注意藍牙模塊連接到 Arduino UNO 的調試端口。因此,在使用藍牙時,調試端口不可用。并且在對 Arduino UNO(配有藍牙模塊)進行編程之前,必須斷開藍牙模塊。編程后,將其重新設置(!)
集會
該設備的組裝非常簡單:
- 將 Arduino UNO 和 TFT-shield 連接在一起;
- 將 OV7670 相機連接到屏蔽層 TFT-shield 上的 20 針連接器(有時我使用 2.54 毫米間距的有角度的 18-20 針連接器作為適配器);
- 將藍牙模塊HC-06(HC-05)連接到TFT-shield上帶有“藍牙”字樣的4針連接器上;
- 將 6-12V 電源適配器連接到 Arduino UNO 板上的電源輸入。
打開電源后,TFT shield 的屏幕應變為紅色。這意味著愿意從 Android 手機接收命令。
在安卓手機上執行以下操作:
- 在 Android 手機上啟動ArduinoTFT應用程序;
- 將手機置于水平位置;
- 開啟藍牙連接,選擇檢測到的藍牙模塊(HC-06);
屏幕上應出現兩個窗口和四個按鈕:
- 右上角窗口是手機的相機取景窗口;
- 左側大窗口 - 接收或發送的圖像。
按鈕功能:
- 將單個圖像從 Android 手機傳輸到 Arduino;
- 將圖像從 Android 手機連續傳輸到 Arduino;
- 將單個圖像從 Arduino 傳輸到 Android 手機;
- 將圖像從 Arduino 連續傳輸到 Android 手機。
圖像大小為 320x240 像素 (2-5 kB)。本章有一個演示視頻。
再一次問好!有一個用于一系列屏幕的更新庫,目前由兩個屏蔽和兩個分線板組成。草圖的編譯取決于所選版本(從 1 到 4)和微控制器類型(MegaAVR 或 ESP-32)。添加了照片,示例。更多信息可以在https://github.com/Ekaburg/EkaTFT中找到。
?
- 帶有Android手機作為攝像頭的藍牙小車 0次下載
- 使用Arduino藍牙攝像頭的安全系統
- labview本地視頻及攝像頭資料 36次下載
- V380攝像頭客戶端下載 0次下載
- 基于LABVIEW編程的USB攝像頭拍照VI文件 56次下載
- 紅外攝像頭驅動工具ThermoX軟件下載 75次下載
- CCD攝像頭的電路原理圖免費下載 153次下載
- 如何實現家庭安防系統中的多攝像頭和視頻采集與網絡傳送 22次下載
- stm32 攝像頭 32次下載
- CCD攝像頭 18次下載
- 攝像頭入門 0次下載
- MINI攝像頭接線圖 35次下載
- 微視攝像頭驅動下載
- 001攝像頭萬能驅動下載
- 中星微305攝像頭驅動下載
- 用usb攝像頭替換手機前置攝像頭可以嗎 3061次閱讀
- AHD攝像頭與CVBS的區別 1.5w次閱讀
- 技術前沿:攝像頭模組 5445次閱讀
- 攝像頭應用領域及應用產品型號 1745次閱讀
- 汽車攝像頭鏈接技術挑戰和解決方案 1187次閱讀
- 如何正確的安裝監控攝像頭 1.3w次閱讀
- fireflyAIO-3399J攝像頭模組簡介 2040次閱讀
- fireflyAIO-3288C主板攝像頭模組簡介 2202次閱讀
- 為什么智能攝像頭這么受歡迎 4813次閱讀
- FireflyRK3288的攝像頭模組介紹 2432次閱讀
- 關于Firefly攝像頭模組的簡介 3347次閱讀
- 如何使用luvcview來實現UVC雙攝像頭拍攝 1w次閱讀
- 雙攝像頭的手機有哪些?雙攝像頭的手機推薦 2.5w次閱讀
- 攝像頭芯片型號有哪些_攝像頭芯片型號匯總 5.9w次閱讀
- 雙攝像頭系列原理 6736次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 2PIC12F629/675 數據手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 3PIC16F716 數據手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 4dsPIC33EDV64MC205電機控制開發板用戶指南
- 5.78MB | 8次下載 | 免費
- 5STC15系列常用寄存器匯總免費下載
- 1.60 MB | 7次下載 | 5 積分
- 6模擬電路仿真實現
- 2.94MB | 4次下載 | 免費
- 7PCB圖繪制實例操作
- 2.92MB | 2次下載 | 免費
- 8零死角玩轉STM32F103—指南者
- 26.78 MB | 1次下載 | 1 積分
本月
- 1ADI高性能電源管理解決方案
- 2.43 MB | 452次下載 | 免費
- 2免費開源CC3D飛控資料(電路圖&PCB源文件、BOM、
- 5.67 MB | 141次下載 | 1 積分
- 3基于STM32單片機智能手環心率計步器體溫顯示設計
- 0.10 MB | 137次下載 | 免費
- 4A7159和A7139射頻芯片的資料免費下載
- 0.20 MB | 55次下載 | 5 積分
- 5PIC12F629/675 數據手冊免費下載
- 2.38 MB | 36次下載 | 5 積分
- 6如何正確測試電源的紋波
- 0.36 MB | 19次下載 | 免費
- 7PIC16F716 數據手冊免費下載
- 2.35 MB | 18次下載 | 5 積分
- 8Q/SQR E8-4-2024乘用車電子電器零部件及子系統EMC試驗方法及要求
- 1.97 MB | 8次下載 | 10 積分
總榜
- 1matlab軟件下載入口
- 未知 | 935121次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233088次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73810次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論