 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
顧名思義,Line Follower Robot 是一種自動引導車輛,它遵循嵌入在地板或天花板上的視線。通常,視線是線跟隨機器人行進的路徑,它將是白色表面上的黑線,但其他方式(黑色表面上的白線)也是可能的。某些先進的線跟隨機器人使用不可見的磁場作為其路徑。
線跟隨機器人的工作
線跟隨機器人的概念與光有關。在這里,我們使用光在黑白表面上的行為。白色反射所有落在它上面的光,而黑色吸收光。
在這個線跟隨機器人中,我們使用紅外發(fā)射器和接收器(光電二極管)。它們用于發(fā)送和接收燈光。當紅外線落在白色表面上時,它會被反射到紅外線接收器上,從而產(chǎn)生一些電壓變化。
當紅外線落在黑色表面時,被黑色表面吸收,沒有光線被反射;因此,IR 接收器不會接收到任何光線。
使用的組件
· 阿杜諾烏諾
· 紅外傳感器
· L293D電機驅(qū)動器
· BO電機
· 輪子
· 鋰離子電池
· 跨接電纜
阿杜諾
Arduino Uno 是一個 8 位 ATmega328P 微控制器。為了支持單片機,它使用了晶體振蕩器、串行通信、穩(wěn)壓器等組件。它有14個數(shù)字I/O引腳(6個引腳可以用作PWM引腳)。它有六個獨立的模擬輸入引腳、一個 USB 連接、一個電源桶插孔、一個 ICSP 接頭和一個復位按鈕。
該板可通過 B 型 USB 電纜使用 Arduino IDE(集成開發(fā)環(huán)境)平臺進行編程。該板可由 USB 電纜或 7 至 20 伏的外部電壓供電
紅外線傳感器
紅外傳感器發(fā)出光線以檢測某些環(huán)境。在紅外光譜中,所有物體都會發(fā)出某種形式的熱輻射,這是我們?nèi)庋劭床坏降模t外傳感器可以檢測到這些輻射。
這里,IR LED 是發(fā)射器,IR 光電二極管是檢測器。IR LED 發(fā)出 IR 光,光電二極管對 IR 光敏感。當紅外光落在光電二極管上時,輸出電壓和電阻將與接收到的紅外光的大小成正比變化
L298N 電機驅(qū)動器
L298N 是控制直流電機的最簡單的芯片組方式之一。它是雙通道電機驅(qū)動器,可以控制直流電機的速度和旋轉(zhuǎn)方向。
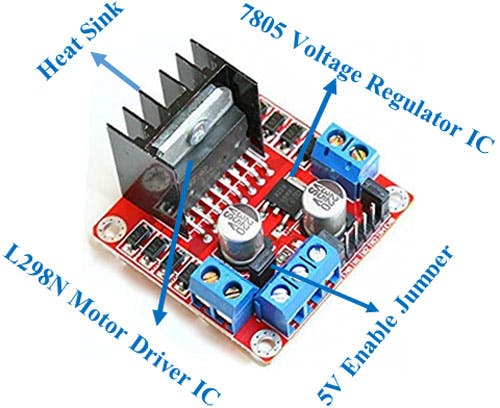
這款 L298N 電機驅(qū)動器是一款大功率電機驅(qū)動模塊。它用于驅(qū)動直流和步進電機。該電機驅(qū)動器由一塊L298N電機驅(qū)動IC和一塊78M05 5V穩(wěn)壓器、電阻、電容、電源LED、5V跳線組成一個集成電路。
博汽車
BO電機被稱為電池驅(qū)動電機。這些電機通常用于用戶需要小型直流電機作為簡單執(zhí)行器的愛好級項目
BO 系列直線電機在較低的工作電壓下提供良好的扭矩和轉(zhuǎn)速。BO 電機有單軸、雙軸和直流塑料齒輪 BO。這些電機消耗低電流。在這個項目中,我們使用了四個單軸 BO 電機。
電路原理圖
?
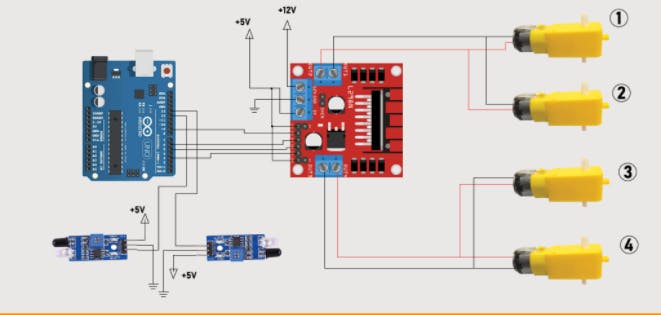
在這里,我們使用了四個 BO 電機。電機 1 和 2 連接到 L298N 的第一個通道,而電機 3 和 4 連接到電機驅(qū)動器的第二個通道。
IN1、IN2、IN3 和 IN4 引腳連接到 Arduino Uno 的引腳 9、6、5、3。在這里,我們使用了 +5V 和使能引腳(EN1 和 EN2)之間的跳線。如圖所示,您可以將其移除并進行外部連接。
下一個pcb
Nextpcb 也是該項目的贊助商。Nextpcb,是中國最大的PCB樣機企業(yè)之一,是一家專業(yè)從事快速PCB樣機和小批量PCB生產(chǎn)的高科技制造商。您只需 0 美元即可訂購至少 5 個 PCB,這意味著制造商可以免費訂購第一個訂單。要獲得制造的 PCB,只需登錄 Nextpcb.com 上傳 gerber 文件的 .zip,或者您也可以拖放 .zip 文件。上傳 zip 文件后,如果文件上傳成功,您將在底部看到成功消息。
編程代碼
int mot1=9;
int mot2=6;
int mot3=5;
int mot4=3;
int left=13;
int right=12;
int Left=0;
int Right=0;
void LEFT (void);
void RIGHT (void);
void STOP (void);
void setup()
{
pinMode(mot1,OUTPUT);
pinMode(mot2,OUTPUT);
pinMode(mot3,OUTPUT);
pinMode(mot4,OUTPUT);
pinMode(left,INPUT);
pinMode(right,INPUT);
digitalWrite(left,HIGH);
digitalWrite(right,HIGH);
}
void loop()
{
analogWrite(mot1,255);
analogWrite(mot2,0);
analogWrite(mot3,255);
analogWrite(mot4,0);
while(1)
{
Left=digitalRead(left);
Right=digitalRead(right);
if((Left==0 && Right==1)==1)
LEFT();
else if((Right==0 && Left==1)==1)
RIGHT();
}
}
void LEFT (void)
{
analogWrite(mot3,0);
analogWrite(mot4,30);
while(Left==0)
{
Left=digitalRead(left);
Right=digitalRead(right);
if(Right==0)
{
int lprev=Left;
int rprev=Right;
STOP();
while(((lprev==Left)&&(rprev==Right))==1)
{
Left=digitalRead(left);
Right=digitalRead(right);
}
}
analogWrite(mot1,255);
analogWrite(mot2,0);
}
analogWrite(mot3,255);
analogWrite(mot4,0);
}
void RIGHT (void)
{
analogWrite(mot1,0);
analogWrite(mot2,30);
while(Right==0)
{
Left=digitalRead(left);
Right=digitalRead(right);
if(Left==0)
{
int lprev=Left;
int rprev=Right;
STOP();
while(((lprev==Left)&&(rprev==Right))==1)
{
Left=digitalRead(left);
Right=digitalRead(right);
}
}
analogWrite(mot3,255);
analogWrite(mot4,0);
}
analogWrite(mot1,255);
analogWrite(mot2,0);
}
void STOP (void)
{
analogWrite(mot1,0);
analogWrite(mot2,0);
analogWrite(mot3,0);
analogWrite(mot4,0);
}
最終輸出
上傳代碼后,如果您的機器人運行方向不正確,請更改 BO 電機的接線。此外,通過改變電位計來校準兩個紅外傳感器。
?
- 使用OpenCV的車道跟隨機器人
- DIY簡單的線跟隨機器人
- 基于Arduino Nano的PID線路跟隨機器人 2次下載
- 基于PID的線跟隨機器人
- 線跟隨機器人開源硬件
- 使用TI RSLK MAX構(gòu)建聲音跟隨機器人
- 使用Pico的線跟隨機器人
- PID控制線跟隨機器人
- 人類跟隨機器人v2.0開源分享
- 如何制作Arduino人類跟隨機器人
- 帶有PID控制的線跟隨機器人
- 最簡單的線跟隨機器人
- 物體跟隨機器人開源分享
- 人類跟隨機器人開源分享
- 線跟隨機器人開源項目
- 一個簡單的線路跟隨器機器人電路 2189次閱讀
- 基于ATmega16構(gòu)建的線跟隨機器人的完整電路圖 2042次閱讀
- 如何利用Arduino UNO制作一個爬樓梯機器人 4296次閱讀
- 如何使用Arduino制造一個自動平衡機器人 4833次閱讀
- 基于SMARS 機器人的3D打印部件設計 3382次閱讀
- 基于使用Arduino板及電機驅(qū)動器對機器人進行編程介紹 3839次閱讀
- 面對疫情 醫(yī)療機器人能幫上什么忙? 2236次閱讀
- dfrobotDevastator履帶機器人移動平臺簡介 1657次閱讀
- 協(xié)作機器人的起源_為什么需要協(xié)作機器人 8322次閱讀
- 簡易機器人制作圖解 1w次閱讀
- 基于PLC的機器人伺服運動控制系統(tǒng)設計詳解 1.6w次閱讀
- 軟體機器人 前所未見的機器人 3770次閱讀
- 何為柔性機器人?如何讓機器人的身體柔若無骨? 1.1w次閱讀
- 基于3D打印技術的跳舞機器人的硬件電路制作 4559次閱讀
- 智能機器人的三大關鍵技術詳解 3.2w次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅(qū)動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論