 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
The Irrigator:人工智能驅(qū)動的灌溉機(jī)器人
Irrigator是一種自主、可持續(xù)發(fā)展的智能機(jī)器人,可以照料室內(nèi)和室外植物。本演示的重點(diǎn)是給植物澆水,但設(shè)計和實現(xiàn)可以擴(kuò)展到執(zhí)行其他任務(wù),例如分配肥料和殺蟲劑、檢測土壤中的水位、檢測生病的植物。
設(shè)計
廣泛的設(shè)計目標(biāo):
自主- 它在沒有(或最少的)人為交互的情況下完成工作。
可持續(xù)發(fā)展——它使用太陽能為電池充電,使用雨水為水箱注水,并且盡可能使用回收材料制成(例如,我使用回收木材、金屬和螺絲制作底盤)。
智能- 它使用計算機(jī)視覺和機(jī)器學(xué)習(xí)來執(zhí)行復(fù)雜的任務(wù)。
具體設(shè)計目標(biāo):
Nvidia Jetson Nano - 用作可以運(yùn)行高級機(jī)器學(xué)習(xí)推理的中央控制單元。
Nvidia Isaac SDK - 用作機(jī)器人的編程平臺。
機(jī)器人整體圖及其主要模塊如圖1所示,實際實現(xiàn)如圖2所示。
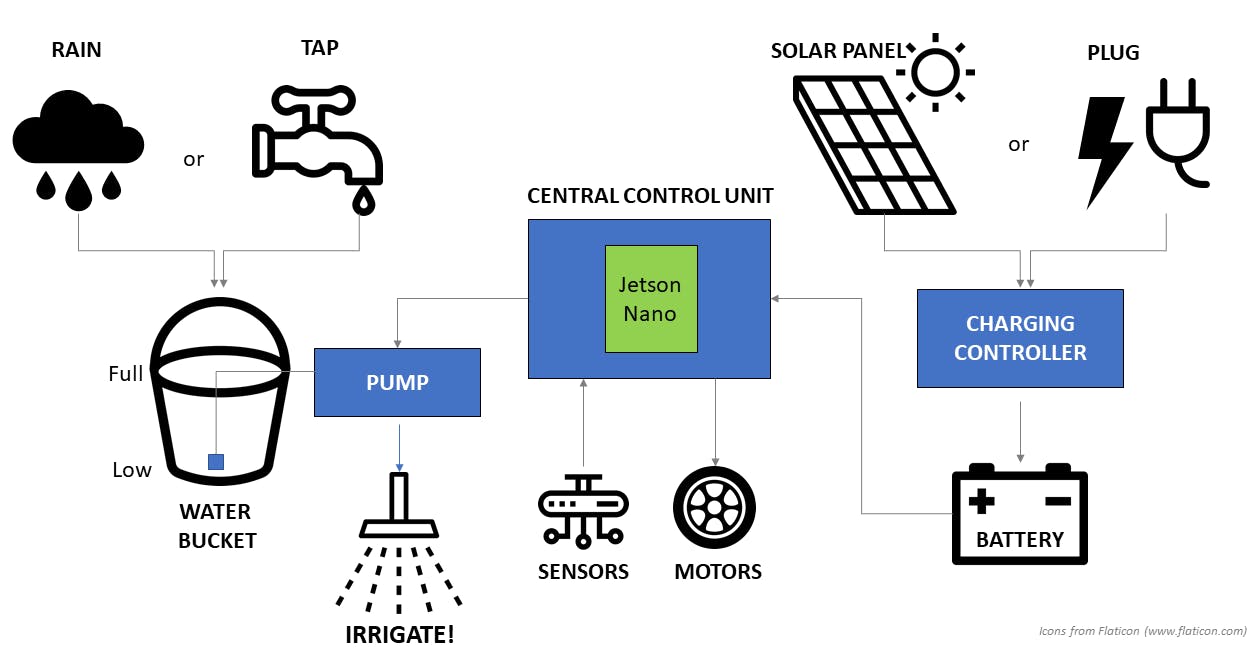
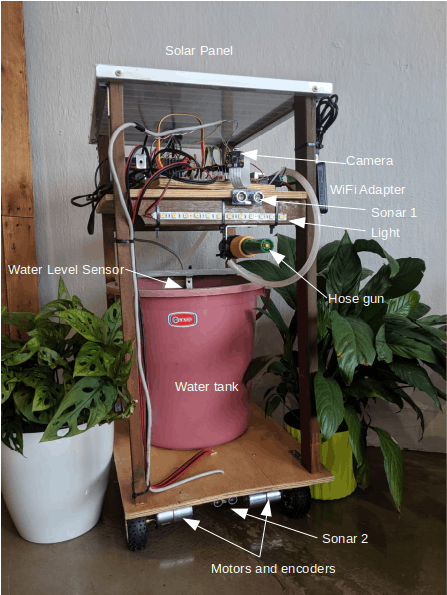
?
硬件
下面(也在這里)是這個項目中使用的材料的詳細(xì)清單(木頭、螺絲、膠水、電線、膠帶等除外)。價格以新加坡元為單位,鏈接僅供參考。對于我從當(dāng)?shù)匚褰鸬曩徺I的某些組件,我找不到鏈接。但是,我在下面提供了詳細(xì)信息和照片。
該項目的估計成本為 459 新元(約合 330 美元)。
我沒有某些組件的網(wǎng)絡(luò)參考,因為我是從我所在地區(qū)的五金店購買的。
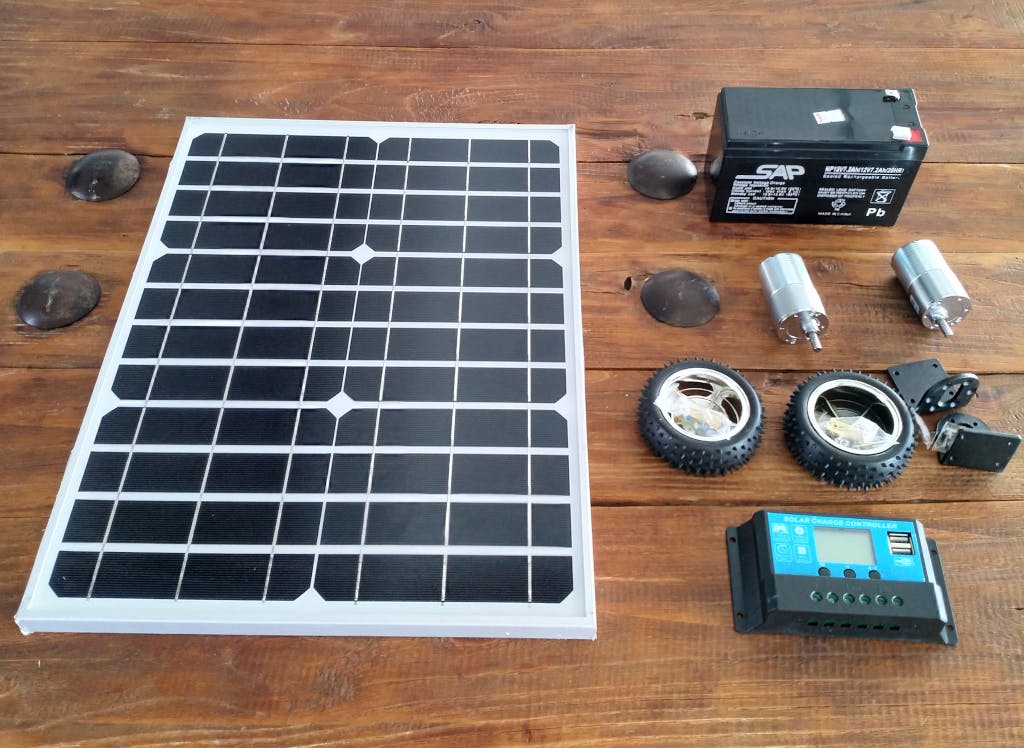
在圖 3 中,我展示了 (1) 一塊 20W 太陽能電池板,(2) 一塊 7Ah 可充電鉛酸電池,(3) 2 個帶齒輪箱的電機(jī),(4) 2 個輪子,(5) 2 個電機(jī)支架,以及(6)太陽能電池板充電器一個。如果你打算建造這個機(jī)器人的復(fù)制品,你可以使用不同規(guī)格的組件,但你需要注意設(shè)計目標(biāo)。例如,電機(jī)應(yīng)能承載至少 10kg 的負(fù)載(主要是水箱)。電池可以具有更高的容量。我不建議使用容量低于 7Ah 的電池。太陽能電池板的功率應(yīng)該足以給電池充電。


圖 4 和圖 5 顯示了帶有齒輪箱的電機(jī)。這些是 12V、5000 轉(zhuǎn)/分的電機(jī),而齒輪箱將轉(zhuǎn)速降低到 30 轉(zhuǎn),并使電機(jī)能夠拉動超過 10 公斤。圖 4 還顯示了輪子。確保支撐輪(未連接到電機(jī)的)可以左右旋轉(zhuǎn)。如果它們是固定的,您的機(jī)器人可能會由于高摩擦力而無法左轉(zhuǎn)或右轉(zhuǎn)。
控制單元
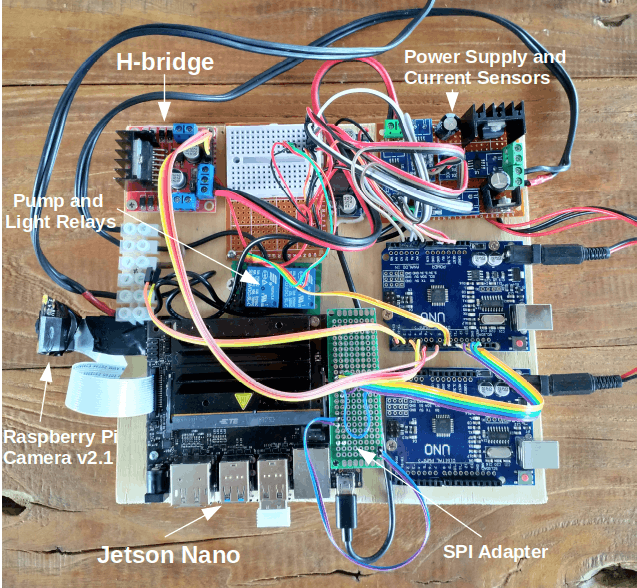
控制單元是機(jī)器人的“大腦”。圖6是控制單元的原理圖,圖7是控制單元的接線圖(我附上了Fritzing做的原理圖),圖8是實際實現(xiàn)。Irrigator的“大腦皮層”是一塊Jetson Nano板,運(yùn)行主控制回路和 AI 算法來檢測植物和花盆。附加到它的是 Raspberry Pi Camera v2.1。
為了控制電機(jī)和讀取所有傳感器,我使用了兩個Arduino Uno板。這些板代表灌溉器的“小腦”。Jetson Nano 和 Arduino Uno 之間的通信是通過SPI完成的。我使用 Jetson 的J41 連接器的 SPI1 和 SPI2 引腳以及對應(yīng)于其SPI 接口的 Arduino Uno 的引腳 10 (SS)、11 (MOSI)、12 (MISO)、13 (SCK) 。
要在 Jetson 上啟用 SPI ,您需要運(yùn)行:
sudo /opt/nvidia/jetson-io/jetson-io.py
完成此步驟后,您可以使用/dev/spidev0.0和/dev/spidev1.0與兩個 Arduino 板進(jìn)行通信。我使用 Linux 源代碼中的SPI 測試程序作為我在 Jetson Nano 上的驅(qū)動程序的起點(diǎn)(請參閱Github上的更多詳細(xì)信息)。
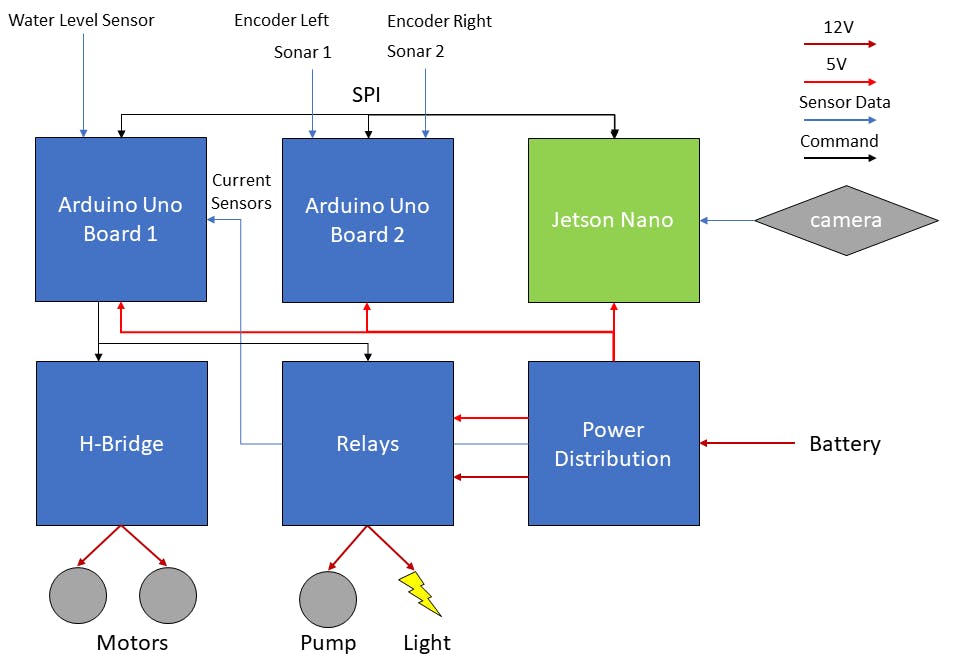
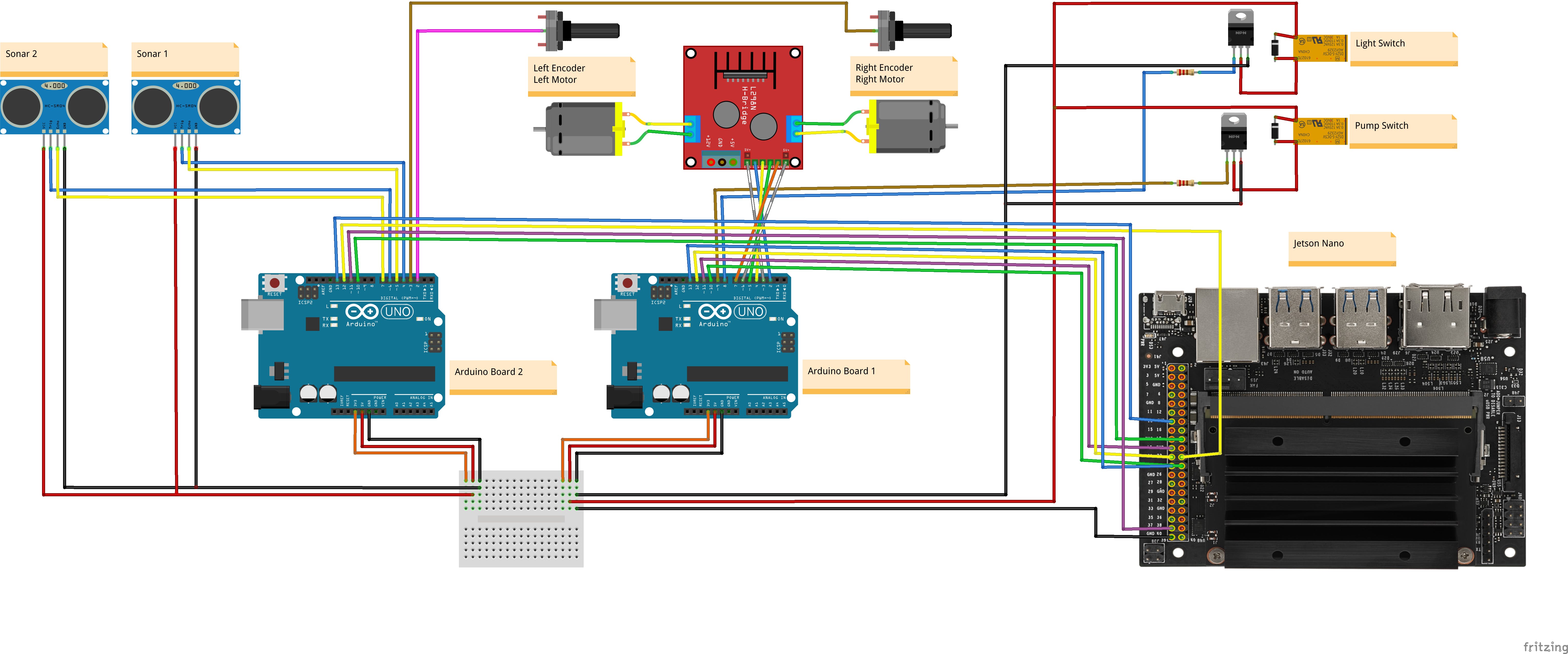
控制單元讀取以下傳感器:
- 用于對象識別的Raspberry Pi 相機(jī)模塊v2.1。
- 兩個聲納 ( HC04 ) 分別放置在距地面約 5 厘米和約 50 厘米處(見圖 2)。您可能想要添加更多的接近傳感器以獲得更高的精度。
- 兩個編碼器分別檢測左右兩個車輪的運(yùn)動。目前,我使用 IR 接近傳感器實現(xiàn)這些編碼器,但它們不是很準(zhǔn)確。
- 水箱水位傳感器(YwRobot Water Level )。
- 【選配】四個電流傳感器,測量不同模塊的用電量。這些是ADS712基于霍爾效應(yīng)的線性電流傳感器。
控制單元命令:
- 使用L298 H 橋的電機(jī)。
- 打開/關(guān)閉水泵和燈的繼電器 ( SRD-05VDC-SL-C )。這些繼電器需要一個額外的晶體管 ( BD137 ),因為 Arduino GPIO 電流可能不足以流過繼電器的線圈。
為了分配和測量這些模塊使用的能量,我創(chuàng)建了一個自定義配電單元。請注意,某些組件使用 12V:
- 馬達(dá)
- 泵(需要 ~ 3A 電流)
- 光
一些組件使用 5V:
- Jetson Nano(需要 ~3A)
- 阿杜諾
- 所有的傳感器
軟件
Irrigator的代碼托管在 Github 上。您可以在README.md中找到有關(guān)設(shè)置的更多詳細(xì)信息。
該代碼有兩個主要層,(1) 機(jī)器人控制和 (2) 使用 AI 進(jìn)行植物檢測。對于第一層,您需要使用 Arduino IDE 和 USB-B 電纜對 Arduino 板進(jìn)行編程。兩塊板的代碼在src/arduino文件夾中。
接下來,您需要在 Jetson Nano 上運(yùn)行驅(qū)動程序。控制單元的主循環(huán)用C代碼表示如下:
while (run_flag) {
go_forward();
if (dist1 < 100 || dist2 < 100) {
stop();
usleep(250000);
on_light();
int ret = run_ai();
if ((ret >> 8) == 1) {
printf("Plant detected!\n");
go_forward();
sleep(2);
stop();
usleep(250000);
on_pump();
sleep(5);
off_pump();
usleep(250000);
go_backwards();
sleep(2);
stop();
usleep(250000);
}
off_light();
usleep(250000);
go_left_90();
}
sleep(1);
}
上面的代碼告訴機(jī)器人只要聲納沒有檢測到障礙物(1m 以內(nèi))就向前移動。如果檢測到某些障礙物,機(jī)器人將執(zhí)行以下任務(wù):
- 停止
- 在燈上
- 拍張照片
- 運(yùn)行物體檢測
- 如果檢測到植物或花盆,則向前移動一點(diǎn),在水面上,等待幾秒鐘,離開水面,向后移動
- 關(guān)燈
- 向左轉(zhuǎn)以避開障礙物
請注意,需要一些延遲(usleep() )以避免 Arduino 上的 SPI 消息丟失。
控制器可以通過兩種方式實現(xiàn)。首先,編寫 C 或 Python 程序來控制機(jī)器人的經(jīng)典整體方式。這是在irrigator_spi.c中實現(xiàn)的。要運(yùn)行它,請在 Jetson 上執(zhí)行這些 shell 命令:
$ cd git/irrigator/src/jetson/driver
$ make
$ ./irrigator_spi
第二種方式,模塊化且靈活,是使用 Nvidia 的Isaac SDK。對于這個版本的 Irrigator,我在 Github 上的src/jetson/isaac文件夾中的兩個小代碼 Driver 和 Detector 中實現(xiàn)了我的代碼。Driver 處理機(jī)器人的硬件和運(yùn)動,而 Detector 處理 AI 部分。他們使用 Isaac Messaging API 進(jìn)行通信。
該軟件的第二層包括使用 AI 對象檢測的植物和盆栽檢測。由于代碼在 Jetson Nano 上運(yùn)行,我首先考慮使用jetson-inference存儲庫中的教程。但是,我使用 TensorFlow Lite (TFLite) 模型獲得了最佳結(jié)果。特別是,我正在使用coco_ssd_mobilenet_v1_1.0_quant_2018_06_29和 inception_resnet_v2_2018_04_27。有關(guān)更多 TFLite 模型,請參閱TFLite 托管模型。我從每個模型中獲取前 3 個檢測結(jié)果并搜索plant of pot關(guān)鍵字(參見run-all-models.sh). 目前,檢測(包括拍照)需要 10-11 秒。光是拍照就需要 4 秒。
未來的工作
我計劃在不久的將來進(jìn)行這些優(yōu)化:
- 只在晚上開燈(使用光檢測傳感器或模型來檢測太陽升起)
- 根據(jù)圖像中檢測到的罐/計劃的位置將軟管槍(或機(jī)器人)居中
- 如果檢測到多個盆/植物,使用一系列灌溉步驟使機(jī)器人居中并為每株植物澆水
- 使用 cron 作業(yè)在晚上開始灌溉,在早上為電池充電
- 2023年人工智能產(chǎn)業(yè)概況及應(yīng)用趨勢分析 8次下載
- Nindamani:基于人工智能的機(jī)械除草機(jī)器人
- 物體檢測人工智能機(jī)器人
- 基于ESP32-CAM的人工智能機(jī)器人設(shè)計資料 3次下載
- 阿基米德:人工智能機(jī)器人貓頭鷹
- 基于人工智能(AI)的巡線機(jī)器人
- 基于人工智能驅(qū)動的關(guān)鍵信息基礎(chǔ)設(shè)施防御 4次下載
- 智能農(nóng)業(yè)除草機(jī)器人研究分析綜述 17次下載
- 基于DSP和PC的農(nóng)業(yè)機(jī)器人控制系統(tǒng) 18次下載
- 人工智能的倫理智能體應(yīng)用及相關(guān)研究 7次下載
- 機(jī)器人的簡介和構(gòu)造詳細(xì)說明 12次下載
- 人工智能行業(yè)發(fā)展?fàn)顩r如何?人工智能行業(yè)研究報告詳細(xì)資料免費(fèi)下載 15次下載
- 檢索式智能對話機(jī)器人開發(fā)實戰(zhàn)案例詳細(xì)資料分析概述 16次下載
- 機(jī)器人編程C語言與人工智能 0次下載
- 一種智能助行機(jī)器人的設(shè)計 3次下載
- 人工智能與機(jī)器人的區(qū)別 3054次閱讀
- 基于智能制造的工業(yè)機(jī)器人應(yīng)用實踐 1484次閱讀
- 發(fā)現(xiàn)更多機(jī)器人開發(fā)技巧 AI與邊緣計算加持 695次閱讀
- 什么是人工智能?人工智能的分類和應(yīng)用介紹 1.1w次閱讀
- 機(jī)器人教育是什么_機(jī)器人教育發(fā)展前景 1975次閱讀
- 人工智能時代硬件和軟件如何彼此影響 1w次閱讀
- 盤點(diǎn)2018年機(jī)器人領(lǐng)域十大技術(shù) 3425次閱讀
- 淺談人工智能客戶服務(wù)的未來 4359次閱讀
- 人與機(jī)器人的自然交互 5160次閱讀
- 人工智能AI在機(jī)器人運(yùn)動控制領(lǐng)域盤點(diǎn)簡介 6948次閱讀
- 工業(yè)機(jī)器人和人工智能的區(qū)別詳細(xì)概述 8210次閱讀
- 一文看懂水下機(jī)器人的發(fā)展及應(yīng)用 2.1w次閱讀
- 人工智能時代的機(jī)器人三大法則 6744次閱讀
- 3種奇葩機(jī)器人的簡單介紹 5409次閱讀
- 在軟件測試行業(yè)中機(jī)器人和人工智能到底承擔(dān)著什么重任 2398次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計實例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論