 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
目標(biāo)
在我們的最終項(xiàng)目中,我們的團(tuán)隊(duì)正試圖讓四旋翼飛行器圍繞一個中心點(diǎn)進(jìn)行自我平衡,類似于其前輪上的 segbot 平衡。為此,我們將實(shí)施與 segbot 類似的過濾器,其中 MPU 將為我們提供加速度和陀螺儀數(shù)據(jù),而電機(jī)將使用這些數(shù)據(jù)來校正俯仰和偏航。使用陀螺儀數(shù)據(jù)和羅盤讀數(shù)的免費(fèi)過濾器用于查找偏航角。由于 F28027芯片的處理限制,滾動和俯仰的狀態(tài)估計是使用輕量級 Madgwick 算法而不是更傳統(tǒng)的卡爾曼濾波器選擇生成的。然后使用這些角度讀數(shù)來控制四軸飛行器的三個旋轉(zhuǎn)軸,然后轉(zhuǎn)換為電機(jī)功率指令。我們還將使用 Raspberry Pi 和 OpenCV 提供兩個彩色斑點(diǎn)的角度跟蹤,然后將其作為俯仰和偏航的角度命令發(fā)送到四旋翼飛行器。最后,我們還將嘗試讓 Raspberry Pi 無線工作。這將使用 ESP8266 芯片完成。該芯片應(yīng)使用 Wi-Fi 與 F28027 板進(jìn)行無線通信。這將有助于校準(zhǔn),因?yàn)槲覀兛梢砸瞥恍┌l(fā)送和接收線。盡管這不是很有用,因?yàn)樗男盹w行器不會移動,但這將是一個很好的實(shí)踐,并且可以更簡單地設(shè)置 Raspberry Pi。
過程
電路板
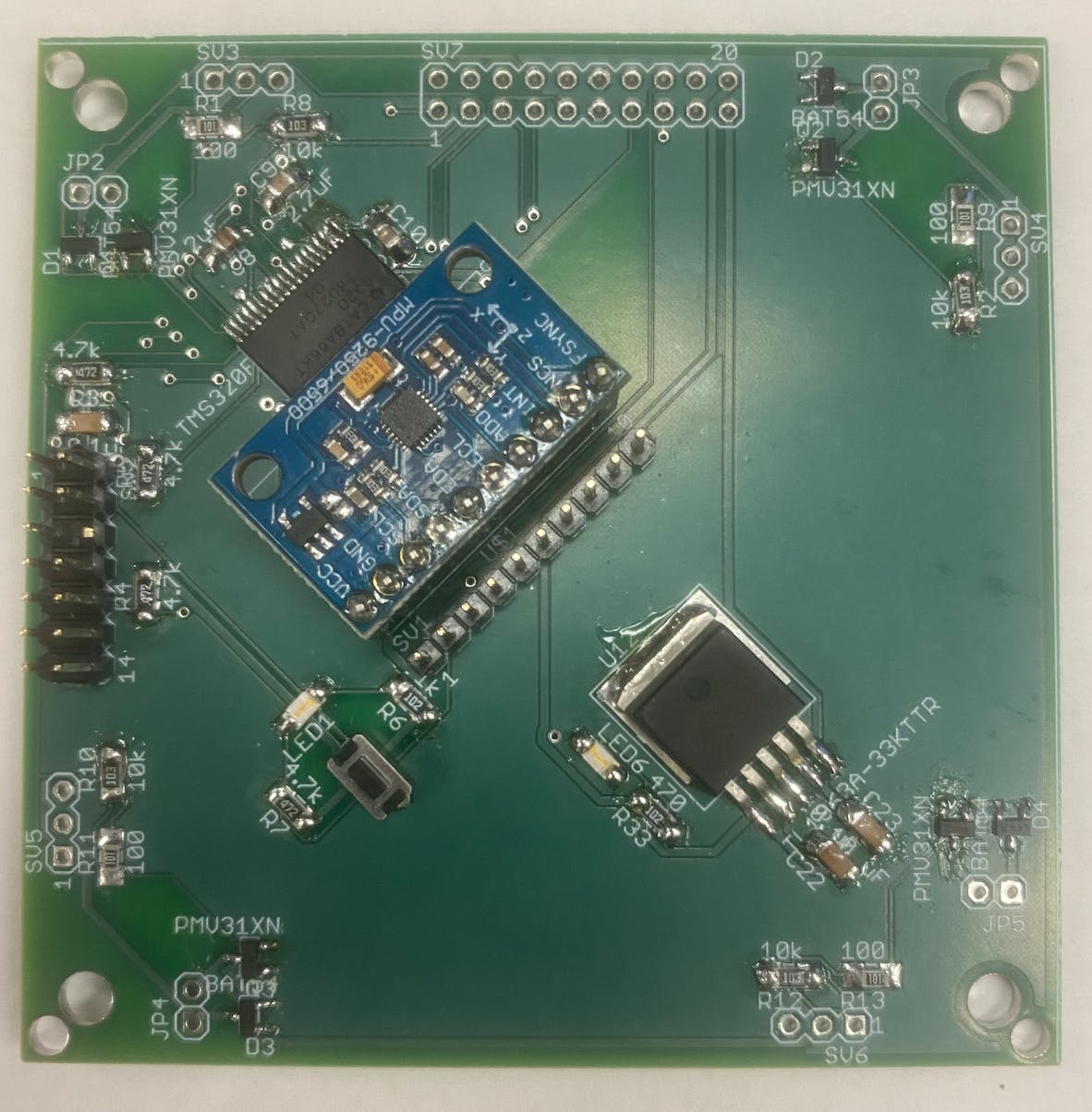
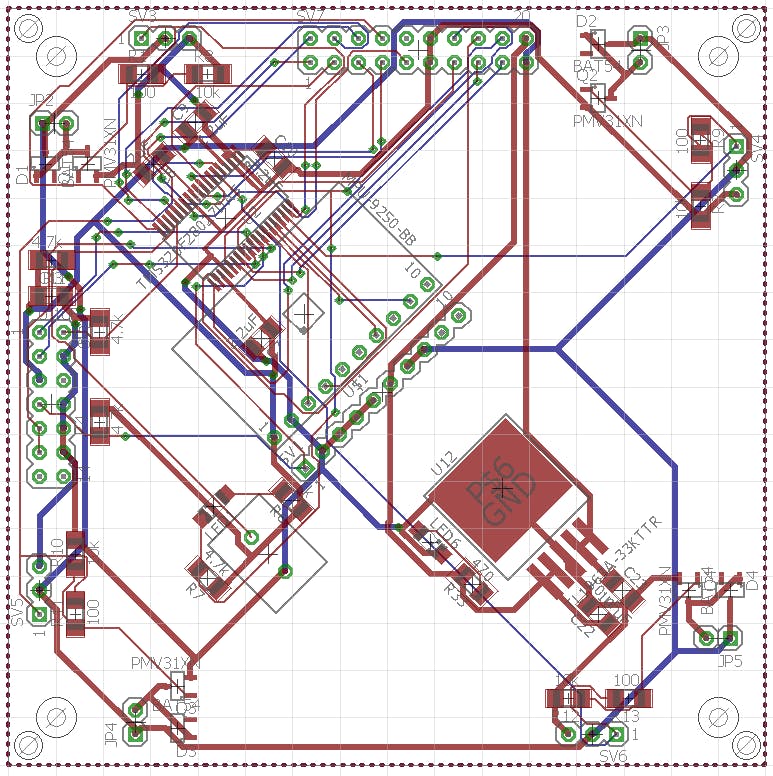
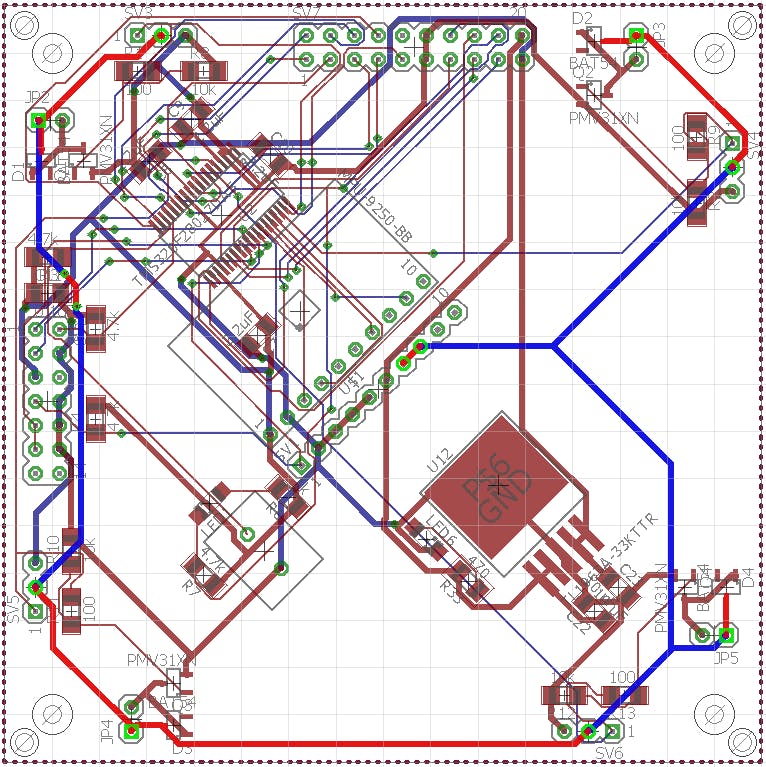
該項(xiàng)目的物理構(gòu)成將基于項(xiàng)目 2 的原理圖構(gòu)建。基本電路由一個 USB COM 端口電路組成,該電路可以將 UART 讀取到 USB 以用于我們的控制輸入。這與我們之前涉及機(jī)器人汽車和 seg-bot 的實(shí)驗(yàn)室的協(xié)議類似。通過此端口,我們可以將 C 語言的機(jī)器代碼從計算機(jī)的編譯器上傳到 TMS320F28027 處理器。請注意,該處理器配備了 C2800 處理器中最低的速度和內(nèi)存,并將決定我們實(shí)現(xiàn)三軸控制的過程。
該板還包含公頭和母頭引腳,以允許連接到外部表面貼裝芯片。在我們的案例中,我們將其設(shè)計為包含一個 Raspberry Pi。我們曾計劃可能將激光雷達(dá)用于距離反饋,將 ESP8266 用于無線通信的可能性。
轉(zhuǎn)子電路由 4 個連接到 EPWM 引腳的 RC 伺服系統(tǒng)組成,每個都包含一個相應(yīng)的 MOSFET 以驅(qū)動電流到每個電機(jī)。將有一個輕質(zhì)塑料螺釘和螺母將每個伺服器直接固定到印刷電路板上。電路板每個角上的通孔都包含在 PCB 制造中,因此將被使用。手臂將從中間部分的每個角向邊緣延伸 45 度。
樹莓派和OpenCV
Raspberry Pi 的目的是運(yùn)行 OpenCV 程序并將值發(fā)送到四軸飛行器。Raspberry Pi 的第一步只是簡單地更新它并確保目錄全部設(shè)置在板上。設(shè)置完成后,使用 OpenCV 和攝像頭實(shí)施了斑點(diǎn)跟蹤程序。攝像頭拍攝前面的基本圖像,然后OpenCV軟件進(jìn)行圖像過濾,只取一定的HSV值。HSV 是色調(diào)、飽和度和值,它定義了給定環(huán)境的顏色和照明。通過定義特定的 HSV 值,相機(jī)可以只看到經(jīng)過圖像過濾的顏色,然后可以看到對應(yīng)于不同顏色紙片的兩個斑點(diǎn),其中可以找到斑點(diǎn)的大小和中心。
有了這兩個角度值,就可以將它們發(fā)送到四軸飛行器,這樣四軸飛行器就會對相機(jī)所看到的做出反應(yīng)。為了與四軸飛行器通信,使用了 UART。這允許串行端口發(fā)送兩個角度值,然后在需要時接收回值。事實(shí)證明,Raspberry Pi 非常有用,因?yàn)樗梢詼p輕相對較小的四軸飛行器處理器的一些處理重量,該處理器已經(jīng)加載了 Madgwick 過濾器。
ESP8266芯片
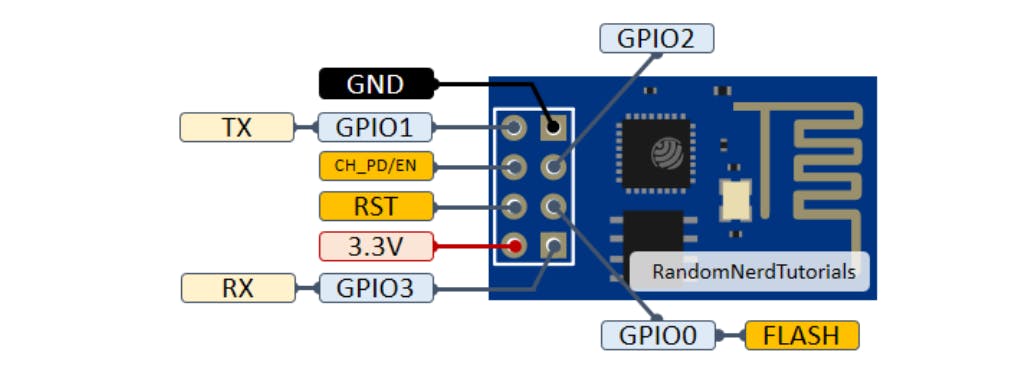
ESP8266 芯片的目標(biāo)是減少四旋翼飛行器所需的電線。該芯片將使四旋翼飛行器能夠通過 Wi-Fi 網(wǎng)絡(luò)與計算機(jī)通信。這將使四邊形具有更少的電纜并且是無線的。讓四旋翼飛行器是無線的將使平衡更容易,而不是將其連接到多條電線上。
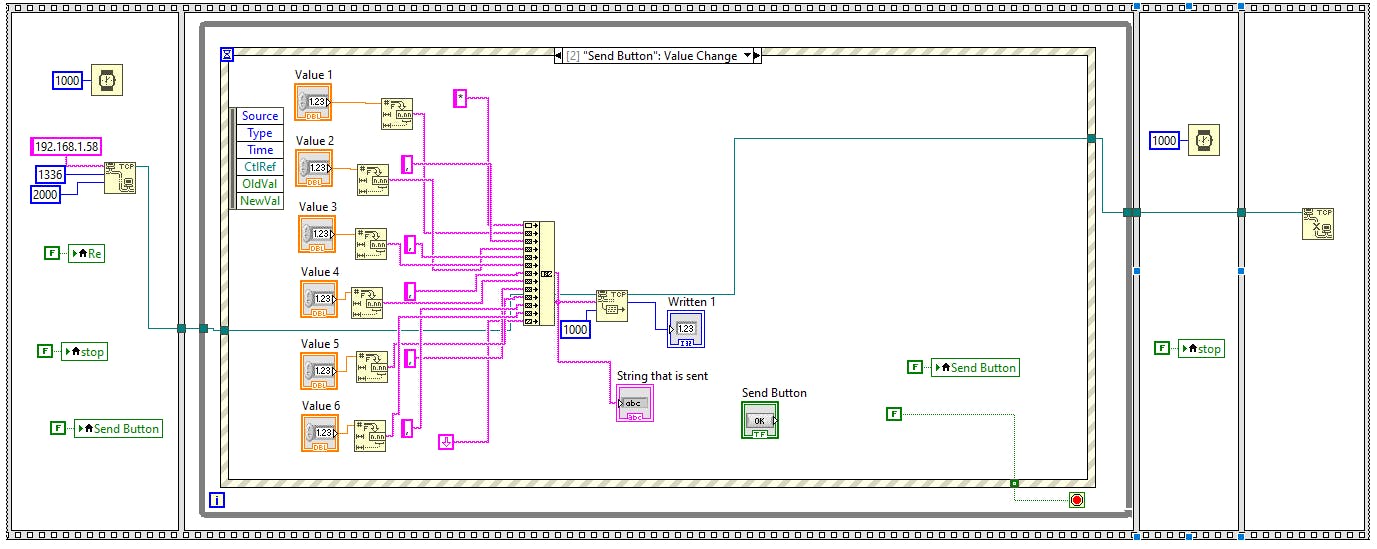
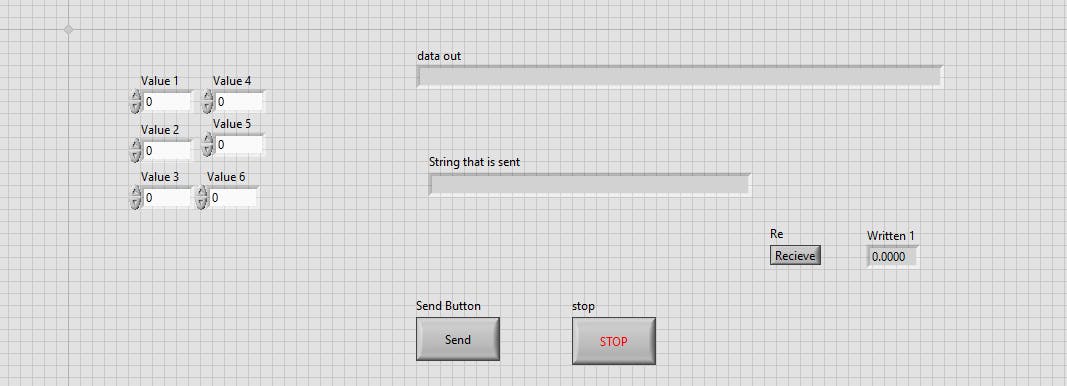
首先,使用了學(xué)期初提供給我們的 LaunchXL-F28379D 板和綠色擴(kuò)展板。該代碼使用了許多 ESP 命令來連接 Wi-Fi 網(wǎng)絡(luò)、IP 地址和芯片。給定的命令在 LaunchXL-F28379D 板上完美運(yùn)行。然后使用 LabView 程序發(fā)送和接收給定數(shù)據(jù)。這可以在 Terra Term 中打印出來,以確保數(shù)據(jù)被正確發(fā)送。這在綠板上運(yùn)行良好,能夠 ping 通 IP 地址。
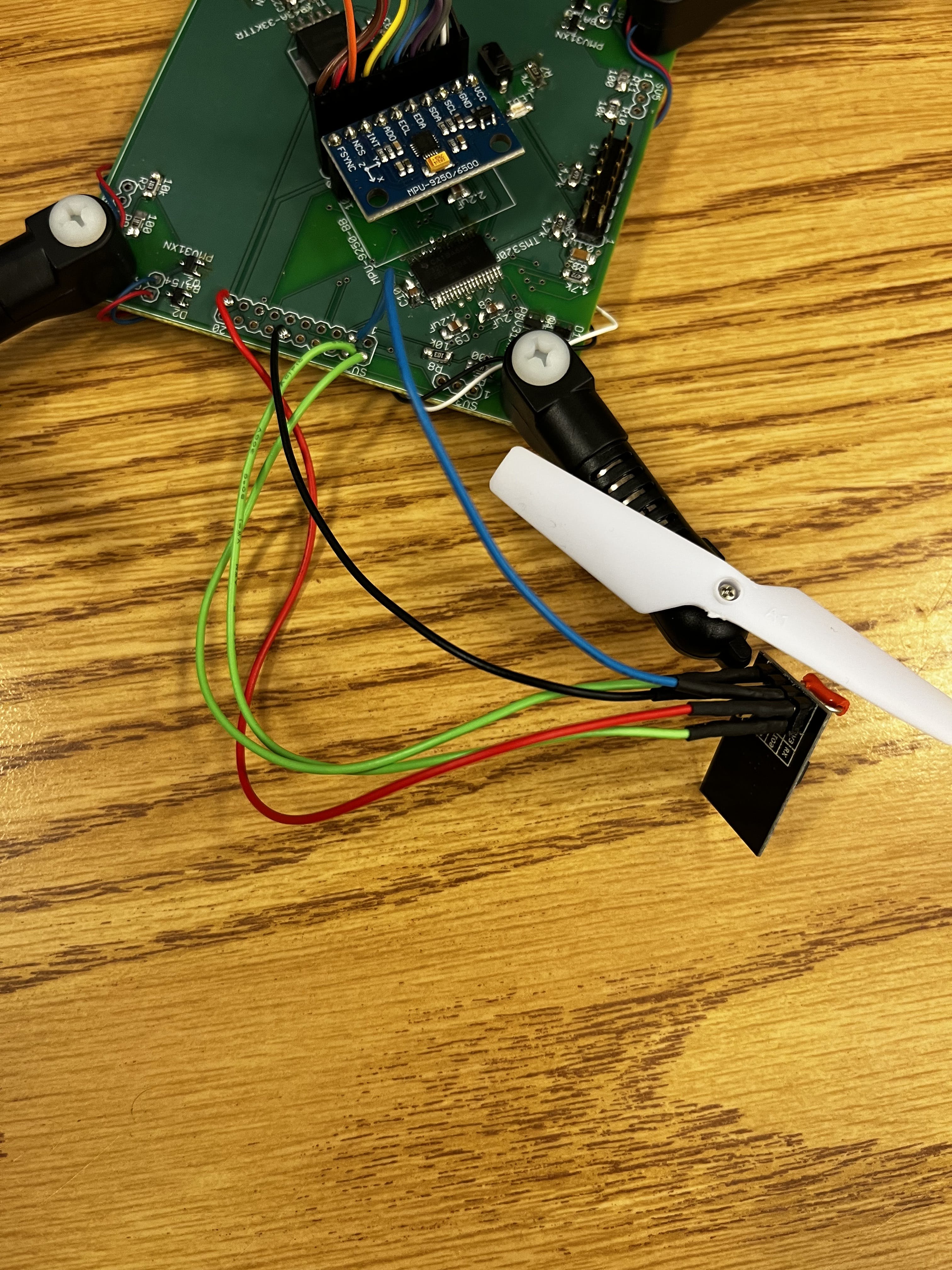
然后,創(chuàng)建了一個新的四旋翼來測試 ESP8266。必須添加幾根電線并將 ESP 焊接到四邊形。這是因?yàn)?quad 板沒有一組用于 ESP 的引腳。使用 ESP 芯片上的母頭線和公頭,將 ESP 連接到四板上。然后更改了 LaunchXL-F28379D 板 ESP 代碼,用于四板和 ESP 芯片之間的通信。這是遇到問題的地方,在問題部分有更多解釋。由于通信問題,ESP 最終沒有在四板上工作。
過濾
每次重新啟動代碼時,quad 都必須定義其狀態(tài)。當(dāng) Madgwick 濾波器在初始校準(zhǔn)期間使用重力矢量計算陀螺儀偏移時,就會發(fā)生這種情況。在此期間,重要的是四邊形保持水平并朝向所需的方向。校準(zhǔn)過程中的不一致會導(dǎo)致偏移計算不正確,從而導(dǎo)致濾波器產(chǎn)生偏移讀數(shù)。
Madgwick 濾波器使用由陀螺儀讀數(shù)的反正切值定義的四元數(shù)。該定義在超過 90 度的某些方向上失效,但對于我們的項(xiàng)目,所有角度都應(yīng)低于 45 度,因此該限制不被視為問題。
最初嘗試使用免費(fèi)過濾器,但這會在高旋轉(zhuǎn)率后產(chǎn)生極高的漂移。即使對穩(wěn)態(tài)測量 - 加速度計 z 非常信任,該濾波器在僅一分鐘的強(qiáng)烈感應(yīng)振蕩后產(chǎn)生超過 30 度的橫搖和俯仰漂移。這導(dǎo)致使用 M??adgwick 過濾器,這是一種計算量更大的算法。然而,通過最大限度地在 Raspberry Pi 上進(jìn)行其他計算的離線計算,開發(fā)了一個可以由 F28027 芯片運(yùn)行的輕量級過濾和控制循環(huán)。
控制是圍繞 3 個四軸飛行器機(jī)身框架軸獨(dú)立執(zhí)行的:x(向前)、y(側(cè)向)和 z(向上)。這些軸對應(yīng)于俯仰角 theta、橫滾角 phi 和偏航角 psi。默認(rèn)控制設(shè)計對每個角度使用 0 的設(shè)定值。該控制器確保四邊形在穩(wěn)定、水平、懸停方面的穩(wěn)定性。四邊形關(guān)于 x 軸和 y 軸近似對稱,因此對這些軸的控制幾乎相同。在實(shí)驗(yàn)后,代表總向上推力的穩(wěn)態(tài) z 狀態(tài)被選擇為大約 quad 全功率的 75%,這代表第四個控制輸入。首先為 3 個旋轉(zhuǎn)軸實(shí)施 PID 控制器。持續(xù)嘗試增益調(diào)整導(dǎo)致可用的控制器具有較慢的穩(wěn)定時間,但是嘗試提高控制器的響應(yīng)能力會導(dǎo)致振蕩行為。鑒于陀螺儀數(shù)據(jù)本身是一個相對較低的方差測量值,可以將雙導(dǎo)數(shù)項(xiàng)添加到控制回路中,以減少傾斜加速度。這個雙微分項(xiàng)與相對較小的增益一起使用,允許一個非常靈敏的控制器,它幾乎瞬間返回到俯仰和滾動的零角度。偏航的控制有點(diǎn)受限。這在很大程度上是因?yàn)槠脚c橫滾和俯仰具有動態(tài)耦合:如果任一角度不精確為 0,則嘗試糾正偏航也會影響橫滾/俯仰。這意味著橫滾/俯仰和偏航的剛性控制器設(shè)計可能會產(chǎn)生不穩(wěn)定,偏航響應(yīng)導(dǎo)致俯仰/滾動,而俯仰/滾動響應(yīng)導(dǎo)致進(jìn)一步偏航。此外,四軸飛行器圍繞偏航軸具有較大的慣性矩,并且由于與螺旋槳推力不對齊而導(dǎo)致驅(qū)動能力較低,從而導(dǎo)致控制響應(yīng)較慢。出于這個原因,選擇了較慢但更穩(wěn)定的偏航響應(yīng),具有適度的比例增益和低微分增益項(xiàng)。偏航在幾秒鐘內(nèi)恢復(fù)平衡,經(jīng)過幾次輕微的振蕩,這被認(rèn)為是可接受的性能。
通過計算每個旋轉(zhuǎn)軸的扭矩,這些扭矩被轉(zhuǎn)換為 0-3000 之間的電機(jī)命令,并發(fā)送到 PWM 1 和 2。每個電機(jī)的穩(wěn)態(tài)推力為 2300 - 兩對平行螺旋槳之間的力差導(dǎo)致俯仰,垂直集之間的差異作用于滾動。最后,由于四邊形的反向旋轉(zhuǎn)特性導(dǎo)致相反的空氣動力扭矩,偏航可以通過改變對角螺旋槳對之間的電機(jī)命令來影響。扭矩和電機(jī)命令之間的關(guān)系是通過將電機(jī)推力和扭矩以及四極慣量縮放到 PWM 輸入范圍 (0-3000) 來估算的。然后對其進(jìn)行調(diào)整以提供良好的響應(yīng)。一旦 Raspberry Pi 配置為計算跟蹤器的偏航和俯仰,這些設(shè)定點(diǎn)被發(fā)送到 F28027 芯片以代替平衡設(shè)定點(diǎn)。這允許通過 OpenCV 相機(jī)對四軸飛行器方向進(jìn)行物理控制。
問題
ESP8266
問題之一是 ESP8266 芯片無法與四核板正確通信。代碼符合要求,但與芯片通信時出現(xiàn)問題。這清楚地顯示在 LabView 程序中。LabView 在到達(dá) TCP 時一直超時,這意味著沒有正確的通信。代碼經(jīng)過多次修改,確保所有部分都能正常工作。通過調(diào)試,可以ping通IP地址。這意味著有一些交流。但是,由于板子和芯片不兼容,所以好像無法通信。
圖片
四轉(zhuǎn)子電路板和原理圖
ESP8266
測試
?
- 餅干士兵ME461開源分享
- ME461:通過手部跟蹤控制四軸飛行器
- 四旋翼自主飛行器探測跟蹤系統(tǒng)
- 多旋翼飛行器設(shè)計與控制的底層飛行控制 0次下載
- 四旋翼飛行器懸停算法設(shè)計與實(shí)現(xiàn) 6次下載
- 四旋翼飛行器的發(fā)展現(xiàn)狀和飛行控制算法的研究仿真 29次下載
- 關(guān)于四旋翼飛行器ppt資料下載 6次下載
- 四旋翼飛行器設(shè)計案例分析 9次下載
- 四旋翼飛行器的設(shè)計與制作 15次下載
- 四旋翼四軸飛行器設(shè)計 11次下載
- 四旋翼飛行器的數(shù)學(xué)模型 28次下載
- 4 2013年四旋翼飛行器論文 1次下載
- 微型四旋翼飛行器的設(shè)計與實(shí)現(xiàn) 53次下載
- 四旋翼飛行器資料 80次下載
- 四旋翼飛行器基本知識 0次下載
- 多旋翼無人機(jī)是如何構(gòu)造的有哪些部位詳細(xì)說明 1.6w次閱讀
- 多旋翼無人機(jī)的飛行原理是什么詳細(xì)講解 3.2w次閱讀
- 淺談四旋翼飛行器的設(shè)計 7392次閱讀
- 星翼電子:MiniFly開源四軸飛行器信息描述 2467次閱讀
- 淺析多旋翼無人機(jī)的傳感器技術(shù) 1.1w次閱讀
- 基于STM32四軸飛行器電路設(shè)計的詳細(xì)圖解資料概述 1.6w次閱讀
- 無人機(jī)旋翼個數(shù)決定了什么?四、六、八旋翼有什么區(qū)別? 2.2w次閱讀
- 四軸飛行器如何對頻_四軸飛行器怎么操作 9.9w次閱讀
- 四軸飛行器什么牌子好_十大四軸飛行器品牌排行版 1.6w次閱讀
- 基于STM32的四旋翼飛行姿態(tài)串級控制的設(shè)計與實(shí)現(xiàn) 7958次閱讀
- 基于STM32的簡易四軸飛行器系統(tǒng)的設(shè)計實(shí)現(xiàn) 1.7w次閱讀
- 四軸飛行器怎么起飛_四軸飛行器原理 4.9w次閱讀
- 基于STM32的四軸飛行器電路設(shè)計—電路精選(53) 4w次閱讀
- 如何設(shè)計無人機(jī)飛行 3904次閱讀
- 教你DIY一個四軸飛行器 8096次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費(fèi)
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費(fèi)
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費(fèi)
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費(fèi)
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費(fèi)
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費(fèi)
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費(fèi)
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費(fèi)
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費(fèi)
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費(fèi)
- 4開關(guān)電源設(shè)計實(shí)例指南
- 未知 | 21549次下載 | 免費(fèi)
- 5電氣工程師手冊免費(fèi)下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費(fèi)
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費(fèi)
- 7電子制作實(shí)例集錦 下載
- 未知 | 8113次下載 | 免費(fèi)
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費(fèi)
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費(fèi)
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費(fèi)
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費(fèi)
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費(fèi)
- 6電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191187次下載 | 免費(fèi)
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費(fèi)
- 8proe5.0野火版下載(中文版免費(fèi)下載)
- 未知 | 138040次下載 | 免費(fèi)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論