說(shuō)到PID算法,想必大部人并不陌生,PID算法在很多方面都有重要應(yīng)用,比如電機(jī)的速度控制,恒溫槽的溫度控制,四軸飛行器的平衡控制等等,作為閉環(huán)控制系統(tǒng)中的一種重要算法,其優(yōu)點(diǎn)和可實(shí)現(xiàn)性都成為
2021-07-15 09:44:13
基于ADuC7026的網(wǎng)絡(luò)化數(shù)據(jù)采集系統(tǒng)設(shè)計(jì):設(shè)計(jì)了一種基于ADuC7026的網(wǎng)絡(luò)化數(shù)據(jù)采集系統(tǒng),以集成ARM7TDM I內(nèi)核的精密數(shù)據(jù)轉(zhuǎn)換器ADuC7026和網(wǎng)絡(luò)控制器RTL8019AS來(lái)構(gòu)造一個(gè)基于以太網(wǎng)的嵌入式
2009-09-25 15:52:26 39
39 ADuC7026和12864連接注意的問(wèn)題
2013-09-26 14:45:4619 電子發(fā)燒友網(wǎng)為你提供ADI(ti)ADUC7026相關(guān)產(chǎn)品參數(shù)、數(shù)據(jù)手冊(cè),更有ADUC7026的引腳圖、接線圖、封裝手冊(cè)、中文資料、英文資料,ADUC7026真值表,ADUC7026管腳等資料,希望可以幫助到廣大的電子工程師們。
2019-02-22 14:51:34
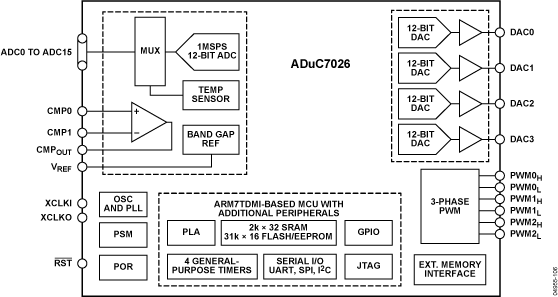
ADuC7023/ADuC7024/ADuC701925/ADuC7026在單芯片內(nèi)集成1MSPS、12位多通道高性能ADC的數(shù)據(jù)采集系統(tǒng)、16位32位MCU和FLASH/EE存儲(chǔ)器。ADC具有多達(dá)
2011-02-08 12:33:13168 UG-669:評(píng)估ADuC7026微轉(zhuǎn)換器
2021-05-25 20:45:0910 ADuC7026為完全集成的1 MSPS、12位數(shù)據(jù)采集系統(tǒng),在單芯片內(nèi)集成高性能多通道ADC、16位/32位MCU和Flash?/EE存儲(chǔ)器。ADC具有多達(dá)12路單端輸入。 另外還有4個(gè)ADC
2023-07-17 10:48:28
評(píng)估ADuC7026/ADuC7027的開(kāi)發(fā)系統(tǒng)為完全集成的1 MSPS、12位數(shù)據(jù)采集系統(tǒng),在單芯片內(nèi)集成高性能多通道ADC、16位/32位MCU和Flash/EE存儲(chǔ)器。用于ADuC702x精密
2021-06-06 09:27:4410 電子發(fā)燒友網(wǎng)為你提供ADI(ti)EVAL-ADUC7026相關(guān)產(chǎn)品參數(shù)、數(shù)據(jù)手冊(cè),更有EVAL-ADUC7026的引腳圖、接線圖、封裝手冊(cè)、中文資料、英文資料,EVAL-ADUC7026真值表,EVAL-ADUC7026管腳等資料,希望可以幫助到廣大的電子工程師們。
2021-08-31 17:00:04
View the reference design for EVAL-ADuC7026QSZ. http://www.qldv.cn/soft/ has thousands of reference designs to help bring your project to life.
2021-08-24 12:00:4211 View the reference design for EVAL-ADUC7026QSP. http://www.qldv.cn/soft/ has thousands of reference designs to help bring your project to life.
2021-07-09 15:26:076 本設(shè)計(jì)針對(duì)災(zāi)后現(xiàn)場(chǎng)環(huán)境參數(shù)資料的采集,提出了一個(gè)低成本解決方案。采用ADI的高性能ARM7-core MCUADuC7026和MEMS傳感器ADXL345作為核心器件,分別完成系統(tǒng)控制和小車姿態(tài)控制,外圍輔以
2011-12-02 14:25:56121 輸入通道,與4個(gè)DAC輸出引腳復(fù)用。 4路DAC輸出僅在特定型號(hào)上提供(ADuC7020、ADuC7026、ADuC7028和ADuC7029)。 然而,在無(wú)DAC輸
2023-07-17 10:11:20
FOC算法中的電流環(huán),速度環(huán)都涉及到PID控制
PID又分位置式PID控制算法和增量式PID控制算法,而個(gè)人認(rèn)為在電機(jī)控制中使用增量式PID效果會(huì)更好一些。下面主要介紹幾種增量式PID
控制算法及C代碼實(shí)現(xiàn)。
2023-05-05 11:51:067 在氣體流量控制中,由于被控參數(shù)具有時(shí)變、非線性、不確定性等因素,常規(guī)PID 控制算法難以滿足控制要求。本文采用模糊PID 算法實(shí)現(xiàn)對(duì)氣體流量的控制,運(yùn)用模糊推理在線
2009-08-27 08:55:4021 PID控制算法控制算法
2016-11-17 11:43:169 PID算法廣泛的被應(yīng)用在很多的控制系統(tǒng)中,最終的目的都是希望通過(guò)pid控制器實(shí)現(xiàn)被控量能穩(wěn)定在預(yù)期的目標(biāo)值。
2023-08-22 11:05:10 190
190 
應(yīng)對(duì)一般研發(fā)問(wèn)題了,而難能可貴的是,在很多控制算法當(dāng)中,PID控制算法又是最簡(jiǎn)單,最能體現(xiàn)反饋思想的控制算法,可謂經(jīng)典中的經(jīng)典。經(jīng)典的未必是復(fù)雜的,經(jīng)典的東西常常是簡(jiǎn)單的,而且是最簡(jiǎn)單的。 PID算法的一般形式 PID算法通過(guò)誤差信號(hào)控制被
2022-07-05 17:47:116853 針對(duì)自己開(kāi)發(fā)的液位控制系統(tǒng)參數(shù)難以調(diào)整的問(wèn)題,本文提出了一種智能PID 的液位控制方法。智能PID 控制算法是在常規(guī)PID 控制算法的基礎(chǔ)上,根據(jù)前人和專家的經(jīng)驗(yàn)以及操作人員
2009-09-01 09:36:2626 這ADuC7019 / ADuC7020/ ADuC7021 /ADuC7022 / ADuC7024 / ADuC7025 / ADuC7026 / ADuC7027 / ADuC
2023-08-14 11:26:41
輸入通道,與4個(gè)DAC輸出引腳復(fù)用。 4路DAC輸出僅在特定型號(hào)上提供(ADuC7020、ADuC7026、ADuC7028和ADuC7029)。 然而,在無(wú)DAC輸
2023-07-17 10:41:16
輸入通道,與4個(gè)DAC輸出引腳復(fù)用。 4路DAC輸出僅在特定型號(hào)上提供(ADuC7020、ADuC7026、ADuC7028和ADuC7029)。 然而,在無(wú)DAC輸
2023-07-17 09:42:00
輸入通道,與4個(gè)DAC輸出引腳復(fù)用。 4路DAC輸出僅在特定型號(hào)上提供(ADuC7020、ADuC7026、ADuC7028和ADuC7029)。 然而,在無(wú)DAC輸
2023-07-17 09:52:47
4個(gè)ADC輸入通道,與4個(gè)DAC輸出引腳復(fù)用。 4路DAC輸出僅在特定型號(hào)上提供(ADuC7020、ADuC7026、ADuC7028和ADuC7029)。 然而
2023-07-17 09:24:32
PID控制器是一種最優(yōu)控制。本文講述了增量式PID算法原理與數(shù)字PID算法原理與數(shù)字PID算法程序,詳細(xì)講解了什么是pid算法。
2012-01-01 11:58:2110223 
當(dāng)涉及到控制系統(tǒng)中的精確調(diào)節(jié)和穩(wěn)定性,PID(比例-積分-微分)控制算法是一種不可或缺的工具。本文將簡(jiǎn)單介紹 PID 控制算法,從基本概念到具體實(shí)現(xiàn),一起了解如何使用 PID 控制算法來(lái)優(yōu)化控制系統(tǒng)。
2023-08-29 16:39:04429 
輸入通道,與4個(gè)DAC輸出引腳復(fù)用。 4路DAC輸出僅在特定型號(hào)上提供(ADuC7020、ADuC7026、ADuC7028和ADuC7029)。 然而,在無(wú)DAC輸
2023-07-17 10:44:44
輸入通道,與4個(gè)DAC輸出引腳復(fù)用。 4路DAC輸出僅在特定型號(hào)上提供(ADuC7020、ADuC7026、ADuC7028和ADuC7029)。 然而,在無(wú)DAC輸
2023-07-17 10:15:11
輸入通道,與4個(gè)DAC輸出引腳復(fù)用。 4路DAC輸出僅在特定型號(hào)上提供(ADuC7020、ADuC7026、ADuC7028和ADuC7029)。 然而,在無(wú)DAC輸
2023-07-17 10:01:46
本課題是基于 PID 控制算法來(lái)進(jìn)行控制的。在未做這個(gè)
課題之前,對(duì)于 PID 控制算法是一知半解,只是知道是一種
反饋控制的策略,感覺(jué)很神秘。
2016-03-09 10:57:231 PID 控制器以各種形式使用超過(guò)了 1 世紀(jì),廣泛應(yīng)用在機(jī)械設(shè)備、氣動(dòng)設(shè)備 和電子設(shè)備.在工業(yè)應(yīng)用中PID及其衍生算法是應(yīng)用最廣泛的算法之一,是當(dāng)之無(wú)愧的萬(wàn)能算法
2022-08-22 09:12:565239 數(shù)字PID算法在無(wú)刷直流電機(jī)控制器中的應(yīng)用
2016-11-08 18:51:165 PID 算法 在過(guò)程控制中,PID 控制器,一直是應(yīng)用最為廣泛的一種自動(dòng)控制器;PID控制也一直是眾多控制方法中應(yīng)用最為普遍的控制算法,PID 算法的計(jì)算過(guò)程與輸出值(OUT)有著直接函數(shù)關(guān)系,因此
2017-11-21 17:03:0428 一. 簡(jiǎn)介 相信大家對(duì)于PID控制算法,都不感到陌生了,平衡車就是靠它平衡起來(lái)的,還有飛控的平衡算法也是它,以及FOC中的閉環(huán)控制中也是用的它,它不僅簡(jiǎn)單,而且易于理解。那么本篇文章將簡(jiǎn)要介紹一下
2023-07-20 09:23:12671 
)其實(shí)就是指比例,積分,微分控制。目前來(lái)說(shuō),PID控制算法是一種使用非常廣泛的算法。比在平衡車、無(wú)人機(jī)等方面的應(yīng)
2022-01-13 13:39:2441 本章講述了群智能算法在PID控制仿真中的應(yīng)用研究,PID控制是典型的工業(yè)控制之一,對(duì)于PID控制,主要難點(diǎn)在于PID的參數(shù)整定,現(xiàn)用的工業(yè)控制中,而現(xiàn)今的群智能算法(粒子群算法、遺傳算法、人群搜索算法等)則能夠快速整定PID參數(shù),并且魯棒性很好,因此研究群智能算法控制系統(tǒng)仿真顯得尤為重要。
2019-10-09 08:00:003 很好的模糊算法資料,有例程分析。講解基本的模糊概念,與線性控制PID算法結(jié)合在一塊。
2016-06-24 15:51:293 改進(jìn)PID算法在智能車控制上的應(yīng)用
2016-11-18 17:19:261 ** PID控制算法** ,是結(jié)合比例(P)、積分(I)和微分(D)三環(huán)所提供的負(fù)反饋信號(hào)來(lái)修正系統(tǒng)誤差,以保障系統(tǒng)相對(duì)穩(wěn)定或平衡的控制算法。
但它不等同于三環(huán)控制,三環(huán)控制僅是PID算法的具體應(yīng)用之一。
2023-05-19 16:48:58570 
針對(duì)一般BP 算法存在的不足,提出一種改進(jìn)的BP 算法,并將其應(yīng)用于PID 控制器的參數(shù)設(shè)計(jì)中,并且克服了常規(guī)的PID 控制器參數(shù)整定的費(fèi)時(shí)性,用MBP 算法的PID 控制器代替常規(guī)的PID 調(diào)
2009-08-07 09:42:2318 本文檔的主要內(nèi)容詳細(xì)介紹的是數(shù)字PID控制算法教程之如何對(duì)標(biāo)準(zhǔn)PID算法進(jìn)行改進(jìn)主要內(nèi)容包括了:對(duì)標(biāo)準(zhǔn)PID算法的改進(jìn),飽和問(wèn)題及其抑制,數(shù)字濾波,Smith
2018-12-04 08:00:0014 提出了一種基于串級(jí)PID控制算法的壓控大功率電流源設(shè)計(jì)方案。該電流源在內(nèi)環(huán)電路采用PID控制電路,提高電流響應(yīng)速度;外環(huán)電路采用數(shù)字PID控制算法,精確控制電流輸出的串級(jí)PID控制模式。
2018-02-10 13:25:033401 
PID控制算法控制算法說(shuō)明。
2021-06-04 14:42:349 由51單片機(jī)組成的數(shù)字控制系統(tǒng)控制中,PID控制器是通過(guò)PID控制算法實(shí)現(xiàn)的。51單片機(jī)通 過(guò)AD對(duì)信號(hào)進(jìn)行采集,變成數(shù)字信號(hào),再在單片機(jī)中通過(guò)算法實(shí)現(xiàn)PID運(yùn)算,再通過(guò)DA把控制量 反饋回控制源。從而實(shí)現(xiàn)對(duì)系統(tǒng)的伺服控制。
2011-03-16 15:26:36153 在工業(yè)應(yīng)用中PID及其衍生算法是應(yīng)用最廣泛的算法之一,是當(dāng)之無(wú)愧的萬(wàn)能算法,如果能夠熟練掌握PID算法的設(shè)計(jì)與實(shí)現(xiàn)過(guò)程,對(duì)于一般的研發(fā)人員來(lái)講,應(yīng)該是足夠應(yīng)對(duì)一般研發(fā)問(wèn)題了,而難能可貴的是,在我所接觸的控制算法當(dāng)中,PID控制算法又是最簡(jiǎn)單,最能體現(xiàn)反饋思想的控制算法,可謂經(jīng)典中的經(jīng)典。
2017-11-24 15:18:5844770 
基于單神經(jīng)元PID的WSNs鄰居節(jié)點(diǎn)級(jí)功率控制算法_何世鈞
2017-03-19 19:19:351 PID控制算法仿真與控制:了解計(jì)算機(jī)控制過(guò)程,及用不同種高級(jí)語(yǔ)言編寫(xiě)實(shí)驗(yàn)程序的方法與特點(diǎn)。單回路溫度控制箱了解PID算法和程序設(shè)計(jì)。掌握階躍信號(hào)、自定義信號(hào)下,PID
2009-07-01 18:25:3942 今天和大家聊一聊PID算法的控制原理。
2022-11-02 09:44:555180 發(fā)展到控制具有復(fù)雜動(dòng)力學(xué)的系統(tǒng)。在現(xiàn)實(shí)世界中,所有系統(tǒng)都具有非線性組件,因此在使用PID等經(jīng)典反饋控制時(shí)存在一些挑戰(zhàn)。借助增益調(diào)度和級(jí)聯(lián)PID等方法,能夠使用相同的PID算法控制非線性系統(tǒng)。 1.? ? ? 經(jīng)典控制 最早反饋控制用于機(jī)械系統(tǒng)的控制。系統(tǒng)使用
2023-10-24 14:30:1760 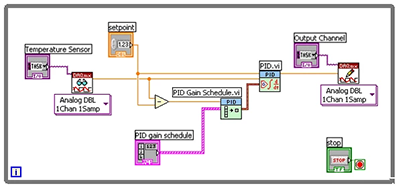
PID算法控制電機(jī)轉(zhuǎn)速
2017-06-25 09:23:45125 什么是PIDPID:Proportion-Integral-Differential在過(guò)程控制中,我們經(jīng)常使用的一種算法就是PID算法了,所謂PID控制算法就是對(duì)偏差進(jìn)行比例、積分、微分控制,來(lái)使偏差...
2022-01-14 11:14:5213
 電子發(fā)燒友App
電子發(fā)燒友App













 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論